Message
浅野研究室では,ロボティクスと制御工学に関する研究を行っています. 基本情報については下記をご覧ください. 物足りないという方は,是非一度,研究室まで見学にお越しください. 研究室の見学は随時受け付けていますので,本学のいつでも大学院説明会のシステムを利用してください.
研究を始める上で必要な知識・能力
解析学,線形代数学,および力学の基礎を習得していることは必須条件です. Mathematica,MATLAB,MaTXなどの計算支援ツールに習熟していると更に良いでしょう.
研究を通して身につく能力
理論研究は主に,モデリング・制御系設計・運動解析の三段階からなります. まず解析の対象とする多リンク系(マルチボディシステム)の運動を数学的にモデル化します. 次に,その力学特性を有効に利用した効率的な制御系設計を行います. 最後に,提案する制御法をシステムに適用し,数値シミュレーション更には実機実験を通してその有効性を確認します.この一連の作業を通して,実世界におけるヒトや動物の運動を正確かつ客観的に把握・解析する能力,および得られた数理的知見を新しい機械システムの開発へ運用する工学的応用力の習得が期待できます.
研究室の指導方針
学生全員が研究活動の一環として,Mathematicaによるマルチボディダイナミクスの導出・解析,MATLABによる数値シミュレータの開発およびこれを用いた数値解析,国内・国際会議における研究成果の発表などに取り組んでいます. また,毎週1回の研究室内セミナー(2時間程度)を開催し,学生が持ち回りで文献紹介,進捗状況報告,発表練習などを行っています.修士課程2年次以上の学生は,自分の研究だけでなく,後輩学生の研究指導も積極的に行います. 研究生活には,コアタイムなどの細かいルールは一切設定していません. 各自で規則正しい生活を心掛け,健康・衛生の管理に気を配ってください. 就職活動などで休暇が必要な場合は,事前に指導教員に連絡してください.
研究内容
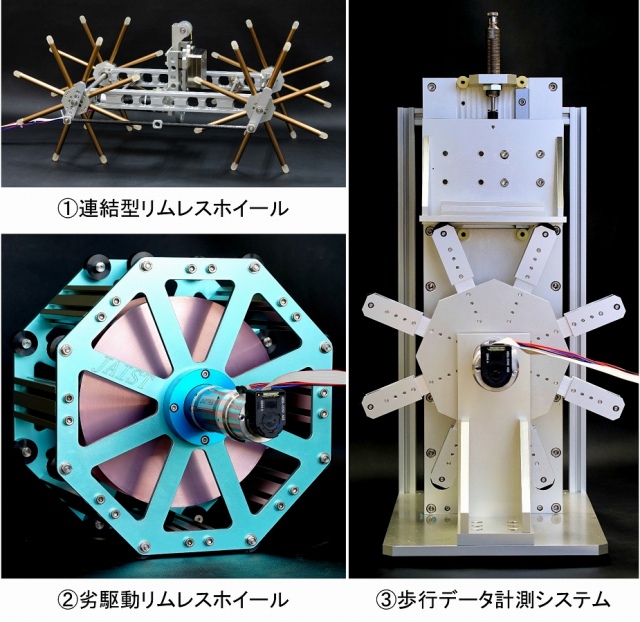
ヒトの2足歩行は高度な技能を必要とするもので機械には実現困難な運動であると考えられてきましたが,数理的には脳神経を使わなくても実現可能な,本質的に安定な運動であることがロボティクス分野の研究を通して明らかにされてきています. これはロボットの2足歩行を工学的応用としてでなく,衝突を含む周期運動として,すなわち物理法則として捉え直したことで生まれた新たな科学的知見です. 当研究室では,このようにロボティクスを一つの手段としてヒトや動物が実現している高度な運動の本質を深く知ろうとする,サイエンスとしてのロボット研究を推進しています. 具体的には,①数理に基づく検証を通してヒトや動物の運動メカニズムを正確かつ客観的に知ること,そして②得られた知見を基に高度な技能を実現する新しい機械システムを創造することを中心的な目標としています. 取り組む研究テーマは各自の素朴な科学的興味に沿って自由に設定して構いません. 歩行の例を幾つか挙げれば,ヒトは何故リラックスして2足歩行ができるのだろうか,踵よりも爪先が長い必要性はあるのか,路面が凍結していると歩き難い(転倒し易い)のは何故か,など非常に基本的な問題ばかりです. これらの疑問に対する客観的回答を与えるために,問題設定に続いて対象とする多リンク系(マルチボディシステム)の数学的モデル化,数値シミュレータの開発,運動解析,実機実験という順に検証を進めていきます. 新しい現象の発見や精密な運動解析も重要な研究課題ではありますが,内容に係わらず,生物の身体形状や運動技能を創り出す客観的理由を深く,かつ明快に説明することを共通の最終目標としています. 最後に,当研究室で開発した使用装置の一例として,連結型リムレスホイール,劣駆動リムレスホイール,歩行データ計測システムの概要を写真で紹介しておきます. いずれもリムレスホイール(スポーク部分のみの車輪)を基本にした低自由度の歩行実験システムですが,理論と実際のギャップや身体と環境の力学的支配関係など,多くの有益な情報を得ることができるものです.