多目的進化計算によるレースゲームAI
背景と目的
近年はスーパーマリオ等のリアルタイムでの操作が必要なゲームを対象とした研究が活発になっており,いわゆるカーレーシングゲームと呼ばれるジャンルもその一つとなっています.カーレーシングにおいては,
・操作の規則を表すために何らかの入出力モデルを用いる
・モデルに与えられているパラメータは進化的計算で調整(評価にはラップタイム等を用いる)
というアプローチがコントローラの作成において有効とされてきました.
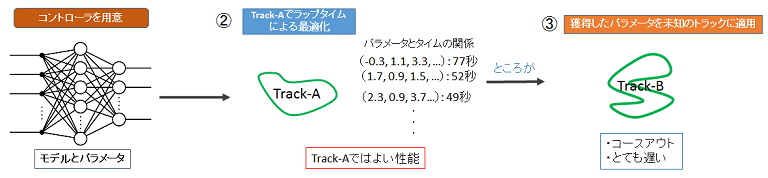
しかし,以上の方法で得られるコントローラでは,未知のコースではスムーズに走行できるとは限らないという問題が生じるため,これを解決するコントローラ作成手法の開発を目標としています.
アプローチと結果概要

本研究では前述の課題を踏まえ,
(a)タイムに加えて“危険度”を考慮
(b)タイムと危険度による多目的最適化
(c)(b)で得たコントローラから実際に走行させた上で選択
という3つのアプローチに基づきコントローラの獲得を試みました.
本アプローチで獲得されるコントローラは実験の結果,
・与えられた未知のコース全てに対し,完走できるものが獲得される
・しばしば,コントローラの限界に近い性能を得られる
という傾向があり,(a)~(c)のアプローチは有望であると示されました.
研究担当者,業績,リンク等
・本研究は金澤直人が主に担当しています.・本研究においては現在までに以下の論文が採録されました.
- 金澤直人,池田心:
カーレーシングゲームにおける多目的最適化に基づくコントローラの設計
第36回ゲーム情報学研究会(2016-08)
- Naoto Kanazawa, Kokolo Ikeda:
Multi-objective Optimization for Balancing Speed and Safeness in Car Racing Game
RISP International Workshop on Nonlinear Circuits, Communications and Signal Processing 2016(NCSP2016),
(2016-03)