Whole Body Manipulation
Fumihiko Asano, Dr. Eng.
Abstract
Recently, powerful and skillful robotic systems for human power assist
and cooperation have been expected widely. Unlike present industrial
robotic manipulators, such human-friendly robots should interact with
us humans using not only the end-effector but also whole arm and body
surfaces skillfully in dynamic environment and various
situations. Based on the observation, we have studied modeling and
bio-mimetic control of a 3d 8-dof whole arm dynamic cooperative
manipulation system using sensitive skin for a sphere object. The
control law is designed based on integration of voluntary and reflex
movement considering the system's redundancy. The voluntary task for
holding objects is considered as an impedance control at the four
contact points with the object using the contact force information of
the sensitive skin, and reflection is introduced as a regulation
problem of the direction between the points of end-effectors and
elbows. The solution for control is formulated and derived from the
optimal control point of view. We then extend the control law to the
case using the body link and modify the control functions in order to
adapt external forces of various directions. The validity of the
proposed method is investigated by numerical simulations.
Keywords
Bio-mimetic control, Cooperative control, Whole arm manipulation
(WAM), Whole body manipulation (WBM), Redundancy, Voluntary movement,
Reflex, Combined motion, Sensitive skin, Impedance control
Our approach
Generally, cooperative manipulation requires the simultaneous control
of both the object's position and the internal force. In our approach,
however, we propose novel design technique for dynamic cooperative
manipulation using whole arm surface, and mainly treat task
distribution for stable grasping. To hold a big and heavy object
softly and safely, human can realize multi-point soft interaction
between the arms and the object, in addition, by combining voluntary
movement and reflex, human can reduce the influence from external
disturbances and solve the redundant dof problem at task level within
real-time. Based on these bio-mimetic studies, in this research, we
propose a control law by integrating voluntary movement and reflex
considering the system's redundancy. The voluntary task for holding
the object is realized by a whole arm's impedance control at the four
contact points with the object using the contact force information of
the sensitive skin. The reflex is introduced as a regulation problem
of the direction between the points of end-effectors and elbows in
order to determine the robotic system's posture uniquely and grasp the
object safely without dropping. The solution for the combined motion
control is formulated and derived from the optimization point of view
by introducing a criterion function. In our simulation studies, we
first investigate the control effect in the presence of external
forces and propose an adjustment of the reflex to make the system
robust. Secondly, we consider a realization of robust and various
dynamic manipulation using not only the whole arm but also the
interaction between the body and the object. In this case we further
adjust the voluntary function in order to adapt to the external forces
from various directions. The validities of these approaches are
investigated via numerical simulations.
It is understood that this research area still leaves many problems to
be discussed and solved, for example, how to model of friction effect
and viscoelastic and deformable objects, how to manipulate them by
robotic arms skillfully in the presence of arm frictions as well as
soft propriety of sensitive skin, how to treat various shape and
multi-link objects, etc. These problems should not be ignored for
practical use, whereas our study focuses on the mathematical
formulation for dynamic cooperative manipulation rather than detailed
discussion about the system's practical application. Although several
assumptions about the robotic system are a little unrealistic as
described in the next section, we leave a detailed discussion about
them for another opportunity. The purpose of our study is limited to
establish a basic theoretical concept of cooperative dynamic WAM, and
throughout this paper we will study the importance of bio-mimetics. It
can be observed from redundant human motions, that a skillful
manipulation of human is not generated by simply using the
mathematical technique of pseudoinverse but rather to divide the
redundancy into multi sub-tasks, partial dof is used for the voluntary
movement for example to move the objects as desired; and the rest is
used for the reflex with respect to the external forces. The final
task realization is through combination of each sub-task. In this
research, we call the desired task realization and the postural
maintenance against external forces respectively as ``voluntary
movement'' and ``reflex''.
Acknowledgment
This research project was sponsored by Bio-Mimetic Control Research Center,
The Institute of Physical and Chemical Research (RIKEN)
. It is a pleasure to acknowledge the hospitality and
encouragement of the members of environment adaptive robotic systems
lab., especially Dr. Zhi-Wei Luo and
Prof. Masaki Yamakita
.
Publications
- F. Asano, Z.W. Luo, and S. Hosoe,
"Whole Body Manipulation Based on Sensitive Skin,"
Proc. of the Annual Conf. of the Robotics Society of Japan, CD-ROM,
1H31, 2002. (In Japanese)
- F. Asano, Z.W. Luo, M. Yamakita and S. Hosoe,
"Dynamic Whole Body Manipulation Under Arm Friction,"
Proc. of the 45th SICE Joint Conf., CD-ROM, 1A1-A3, 2002. (In Japanese)
- F. Asano, Y. Saitoh, K. Watanabe, Z.W. Luo and S. Hosoe, "On
Dynamic Whole Body Manipulation," Proc. of the IEEE Int. Symp. on
CIRA, pp.1201-1206, 2003.
- F. Asano, Z.W. Luo, M. Yamakita and S. Hosoe, "Dynamic Modeling
and Control for Whole Body Manipulation", Proc. of the IEEE/RSJ
Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3162-3167,
2003.
- F. Asano, Z.W. Luo, M. Yamakita, K. Tahara and S. Hosoe,
"Bio-Mimetic Control for Whole Arm Cooperative Manipulation",
Proc. of the RoboMec, 1A1-L1-32(1)-(4), 2004. (In Japanese)
- F. Asano, Z.W. Luo, M. Yamakita and S. Hosoe, "Whole Body
Manipulation by Integration of Voluntary Movement and Reflex,"
Proc. of the Annual Conf. of the Robotics Society of Japan, CD-ROM,
3C26, 2004. (In Japanese)
- F. Asano, Z.W. Luo, M. Yamakita, K. Tahara and S. Hosoe,
"Modeling and Control for Whole Arm Dynamic Cooperative Manipulation",
Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems
(IROS), pp. 3282-3287, 2004.
- F. Asano, Z.W. Luo, M. Yamakita, K. Tahara and S. Hosoe,
"Bio-Mimetic Control for Whole Arm Cooperative Manipulation", Proc. of
the IEEE Int. Conf. on Systems, Man and Cybernetics (SMC),
pp. 704-709, 2004.
- F. Asano, Z.W. Luo, M. Yamakita and S. Hosoe, "Modeling and
Bio-Mimetic Control for Whole Arm Dynamic Cooperative Manipulation",
Advanced Robotics, Vol. 19, No. 9, pp. 929-950, 2005.
Movie collections
-
Whole arm manipulation by constant reflex functions (Realtime)
[Download]
-
Whole arm manipulation by constant reflex functions (Slow motion,
x0.5)
[Download]
-
Whole arm manipulation by adjusted reflex functions (Realtime)
[Download]
-
Whole arm manipulation by adjusted reflex functions (Slow motion,
x0.5)
[Download]
-
Whole arm manipulation with body support by constant voluntary
functions (Realtime)
[Download]
-
Whole arm manipulation with body support by adjusted voluntary
functions (Realtime)
[Download]
Simulation Programs for MaTX
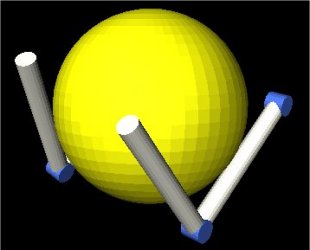
-
Whole arm dynamic cooperative manipulation of a sphere object
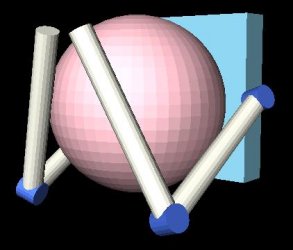
-
Whole arm dynamic cooperative manipulation of a sphere object with
body support
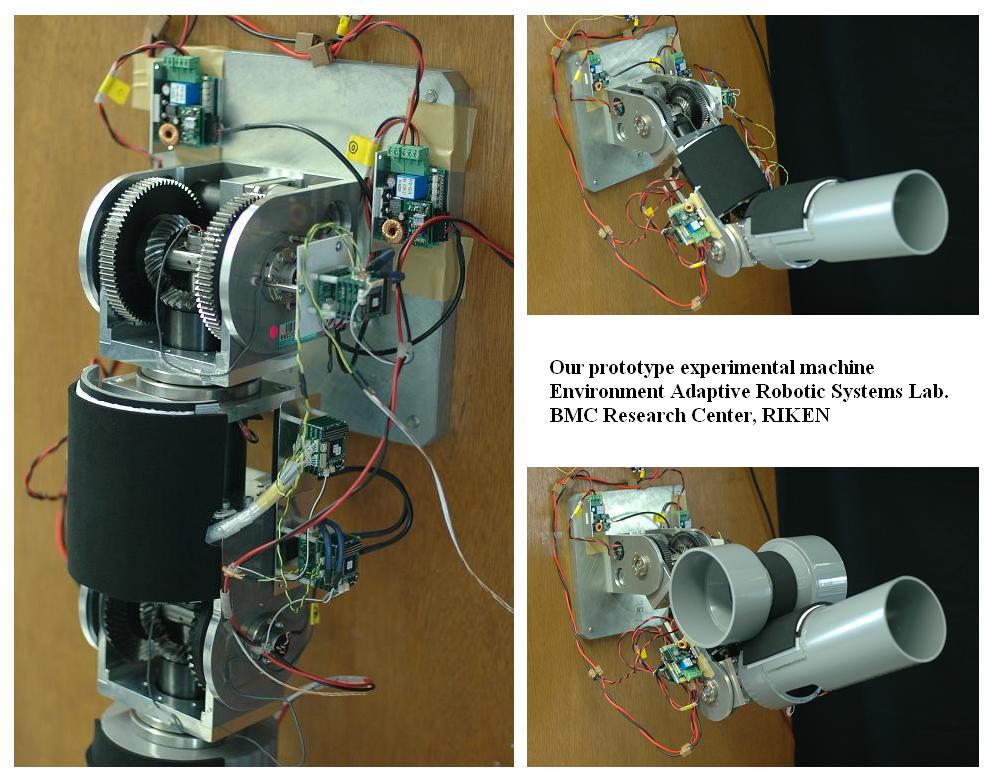
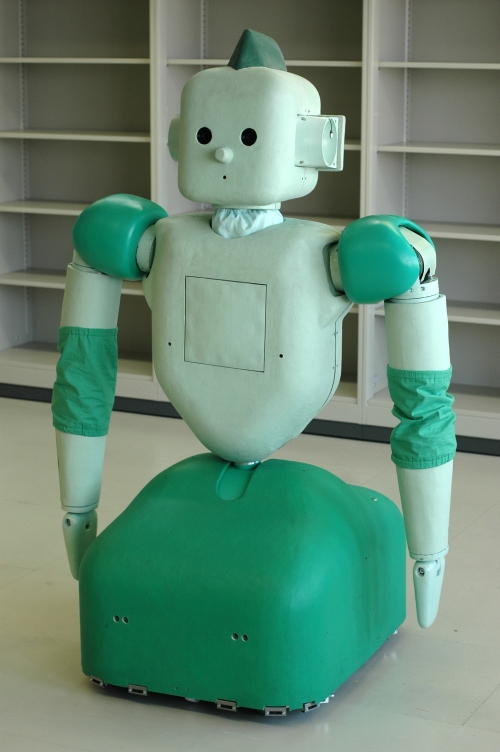
Experiment
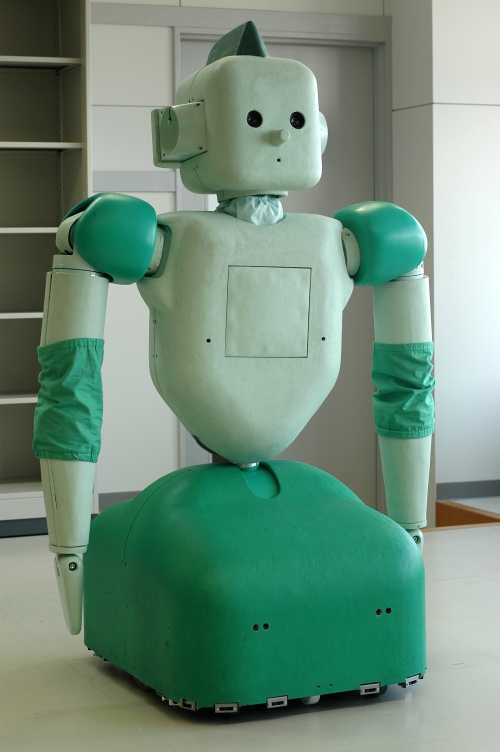
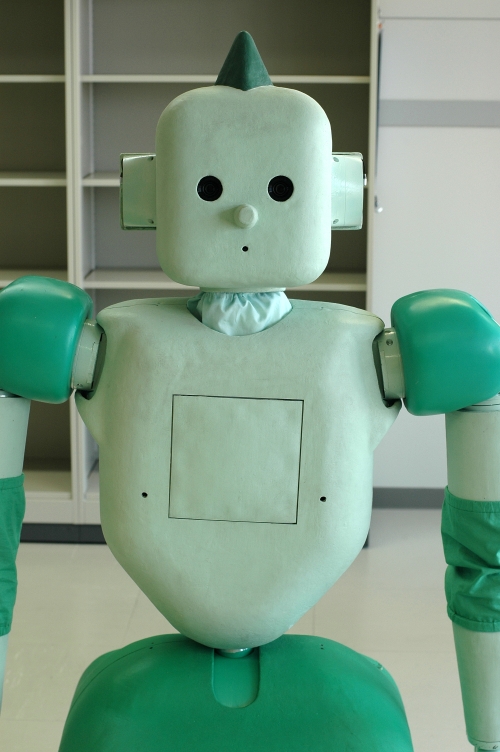
Now we are developing our whole body manipulation system which has
tactile skin sensors.
RI-MAN
Link