Research topic
Hot topicSoft robot hand can grasp wet tofu
Challenge to grab food
Handling fragile, deformable objects like food products has been benefited by applications of soft robotics, a new frontier with harmonic combination of materials and robotics. However, for objects in wet condition, such as a slippery tofu in a soysauce dish, they pose a challenge to robotic grippers, since they should accomplish stable grasp and manipulation with low squeeze force applied to the wet objects.
Bio-inspired solution
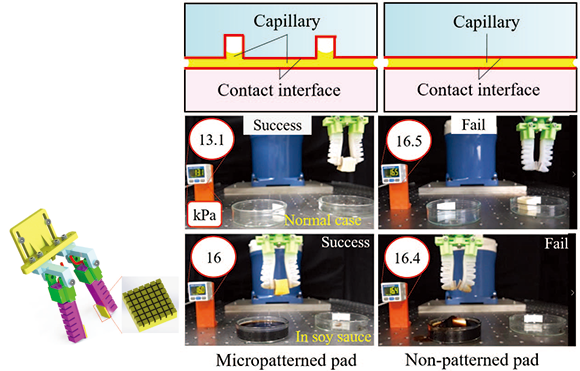
Our study investigated the role of a micropattern with 85 μm×85 μm squared cells, inspired by the wet adhesive structure of a tree-frog toe [1]. Such patterns are then deposited on pads of a soft robotic hand/gripper for gripping and manipulation of food products.
Compared to the non-patterned (flat) pad, the capillary actions occur at narrow grooves of the wet micro-patterned pad, thus increasing the wet adhesion of the contact interface.

Slip suppression
The potential of the micropattern pad to prevent slippage between a robotic gripper and a fragile deformable object in wet conditions without a complicated control method was demonstrated. Results showed the micropatterned pad required less squeeze force than did that without a micropattern, resulting in less deformation of a grasped object such as a piece of tofu. This research is applicable in the food service, and medical industries.