
Understanding natural, efficient, and skillful motions and its application to advanced robot technologies
Laboratory on Robot Dynamics and Control
Associate Professor:ASANO Fumihiko
E-mail:
[Research areas]
Intelligent Robotics
[Keywords]
Underactuated robots, Mechanical systems, Control system technology, Biomimetics
Skills and background we are looking for in prospective students
Mathematics (differential equation and linear algebra), Analytical dynamics, System control theory, Programing (C, Mathematica, and MATLAB)
What you can expect to learn in this laboratory
We expect that all the students in our lab will learn theoretical foundations and technical skills about modeling, control, and motion analysis of mechanical systems. With master students, we expect that they can know how to develop mathematical models of mechanical systems, how to analyze their motions by performing numerical simulations, and how to achieve the target skillful motions via optimal control. With Ph. D students, we expect that they can find new problems
【Job category of graduates】
Electronic manufacturer, Auto company, Railroad company, Research institute, Academic position, Prefectural government
Research outline
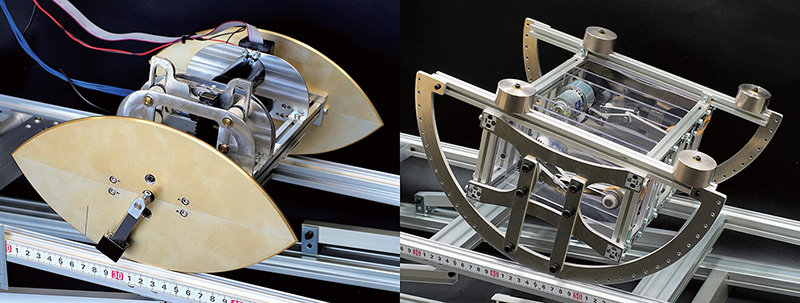
Figure 1: Underactuated locomotion robots utilizing effects of sliding and wobbling.
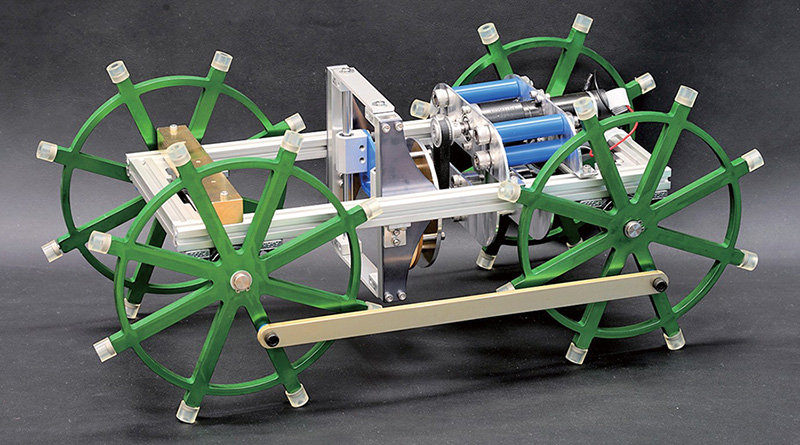
Figure 2: Combined rimless wheel with actively controlled wobbling mass.
Over the last few decades, it was clarified that underactuated locomotion robots including passive-dynamic walkers can generate natural and efficient motions by exploiting their inherent body dynamics or utilizing nonlinear phenomenon without controllers precisely designed. Through deep understanding of the generation and stability mechanisms underlying the resultant underactuated motions, we can develop novel high-performance robots that can execute the desired tasks skillfully and efficiently like humans and animals.
On the other hand, we humans and passive-dynamic walkers can walk on rigid road surface relaxedly, but they cannot walk on frictionless road surface stably despite their effort. In such situations, elaborate control approaches that can strictly reproduce the desired mathematical conditions are required instead. The generated skillful walking gaits are not always intuitively obvious and are not necessarily human-like. They are not easy to understand mathematically, and are the extraordinary motions only machines can do.
Based on the above observations, we promote robotics researches aiming at understanding and achieving advanced robot motions that are efficient and human-like, or that are most extraordinary and cannot be achieved by humans in the following way.
First, we introduce a robot model according to the problem establishment, and develop the equation of motion. Second, we generate the robot motion based on an appropriate controller designed, and discuss the optimality and performance limitation of the robot system through mathematical and numerical investigations. Finally, we conduct experimental case studies, by using real machines developed uniquely by us as shown in Figs. 1 and 2, to examine the validity of the theoretical results obtained, and discuss the feasibility and technological applications on the basis of the knowledge obtained.
Key publications
- Fumihiko Asano, Taiki Sedoguchi and Isao Tokuda, “Mathematical modeling and rolling motion generation of planar seven-link robot that forms passive closed and active open chains,” Proceedings of the IEEE International Conference on Robotics and Automation, pp. 7431-7437, 2025.
- Fumihiko Asano and Taiki Sedoguchi, “Instantaneous walkability determination method for almost linear passive dynamic walker with nontrivial limit cycle stability,” Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 20776-20781, 2025.
- Yanqiu Zheng, Fumihiko Asano, Cong Yan, Longchuan Li and Isao T. Tokuda, “Tensegrity-based legged robot generates passive walking, skipping, and crawling gaits in accordance with environment,” IEEE/ASME Transactions on Mechatronics, Vol. 30, Iss. 6, pp. 6361-6372, 2025.
Equipment
Combined rimless wheel with actively controlled wobbling mass
Object transfer system using locomotion robot as driving source
Flexible passive-dynamic walker formed by rigid frames and elastic elements
Multifunctional legged locomotion system consisting of two X-shaped walkers
Teaching policy
The teaching program in our lab is designed to provide new scientists and engineers who can develop mathematical models and appropriate controllers of robotic systems along the desired tasks. All the students are trained through the experiences of mathematical modeling, programing for numerical simulations, and experimental case studies, in order to acquire fundamental knowledge and technical skills. The final goal is to acquire the abilities to clearly and mathematically explain the motion mechanisms of human beings and animals, and to propose advanced mechanical systems based on the deep understanding. Most students tend to select subjects on locomotion robots for their thesis, but each student can set their own research theme themselves. All laboratory members are required to attend seminars held once a week to uncompromisingly discuss their latest results and problems, and to improve their ability of writing technical papers and presentation skill.
[Website] URL : https://www.jaist.ac.jp/is/labs/fasano_lab/index.html