Human Augmentation Group@JAIST
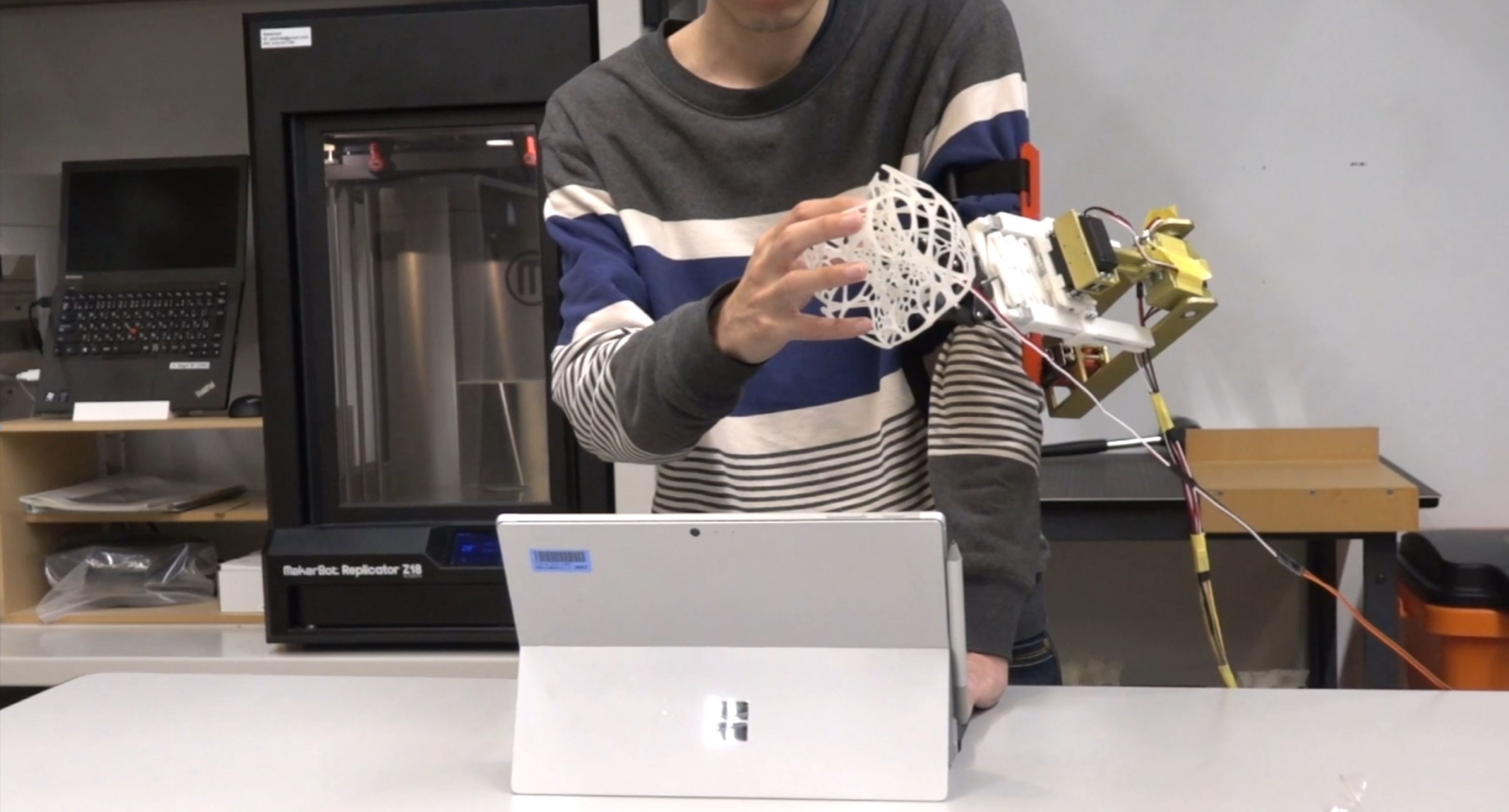
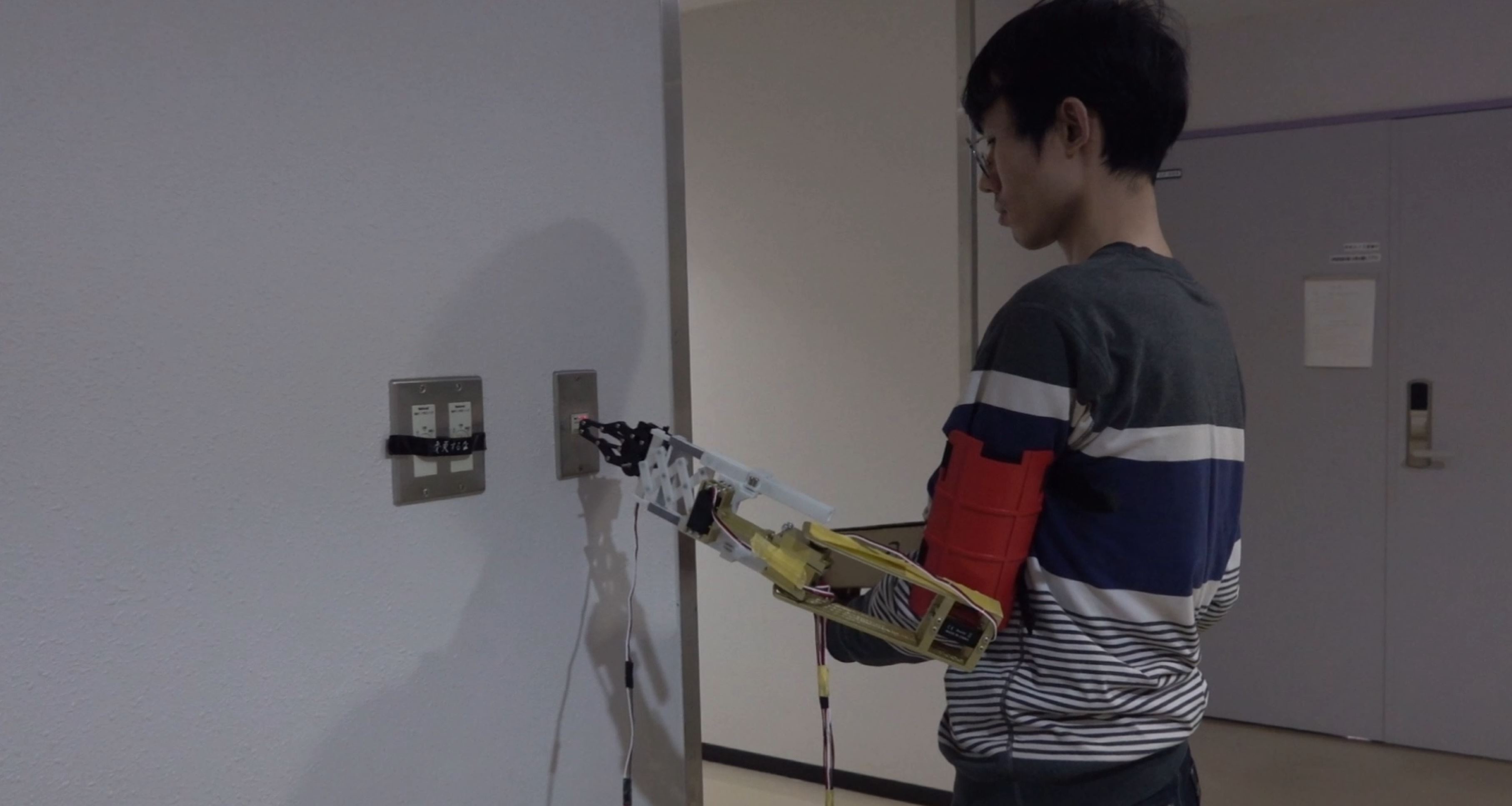
xLimb:Wearable Robot Arm with Storable and Extendable Mechanisms
Zeyu Ding, Shogo Yoshida, Kota Nakamura, Takuma Torii, Haoran Xie
Japan Advanced Institute of Science and Technology (JAIST)
 |
Introduction
We aim to propose a novel wearable device, xLimb, that can feature multiple functions of both storability and extendibility without obstruction to wearers. The proposed device will be mounted on the upper arm to ensure that the center of mass of the device will remain close to the wearer, whereby the exerted burden on the wearer and the servomotor can be decreased. Meanwhile, the folding state provided by the storable mechanism enables the proposed device to maintain a compact size, to avoid hindering the wearer’s main activities when not in use.近年,身体能力の拡張を目的に,両手を使わず作業が可能なウエアラブルロボットアームの研究が進んでいる.しかし従来のデバイスは, 作業を行っていない時でもアームが常に伸びている状態になっているため,腕にかかる負荷が大きく,ほかの作業を行う際に支障をきたすという課題がある. そこで本研究では,腕にかかる負担を最小限にして,アームを用いた快適な作業を可能にするためのロボットアームxLimbを提案する. 収納性と伸縮性を備えることで,長時間の使用でも快適に,かつアームを使用しない時でも省スペースでの作業が可能になる.
Applications
Video
Downloads
video: [Youtube](AH2021)
Publication
Media
Acknowledgements
This project received funding from JAIST Research Grants and JSPS KAKENHI grant JP20K19845, JAPAN.Related Projects
xBalloon: Animated Objects with Balloon Plastic Actuator (2021)NaviChoker: Augmenting Pressure Sensation via Pneumatic Actuator (2021)
EgoSpace : Augmenting Egocentric Space by Wearable Projector (2020)
xClothes : Augmenting Human Thermoregulation Using Shape Changing Clothes (2020)
RESTAIL : A Wearable Tail Device For Augmenting Human Abilities (2019)