
SoREI Laboratory: Building Soft Robots beyond Softness towards Intelligence through Embodiment
Laboratory on Soft Robotics and Embodied Intelligence (SoREI)
Senior Lecturer:NGUYEN Huu Nhan
E-mail:
[Research areas]
Human Information Science Research Area
[Keywords]
Soft Robotics, Embodied Intelligence, Mechanical Intelligence, Robot Learning
Skills and background we are looking for in prospective students
We welcome students from diverse academic backgrounds, including mechanical engineering, computer vision, mechatronics, control, and automation, who are passionate about creating highly functional soft robotic systems. Prospective students are encouraged to have basic knowledge in at least one relevant area, including mechanical system design and fabrication, mechanics of materials, or programming, although this is not a strict requirement. More importantly, we value curiosity, motivation, and a willingness to step beyond one’s comfort zone to engage in interdisciplinary research and learn new skills.
What you can expect to learn in this laboratory
In this laboratory, students can expect to learn how the morphology of soft robots can be leveraged together with physical interaction with the environment to create novel robotic designs, mechanisms, and intelligent behaviors. Our research covers a wide range of activities, allowing students to gain hands-on experience in designing, analyzing, and fabricating soft-material mechanical devices, as well as in optimization and control of soft robotic systems.
【Job category of graduates】Mechanical Engineers, Roboticists, Academia and Industrial Professional Researcher.
Research outline
Our laboratory explores soft robotics as a new paradigm for building robotic systems that are safer, more adaptive, and more capable of interacting with complex real-world environments. Our research focuses on understanding and utilizing these unique properties to create novel robot mechanisms, sensing principles, and embodied control strategies.
1. Highly adaptable soft robots via morphological tuning.
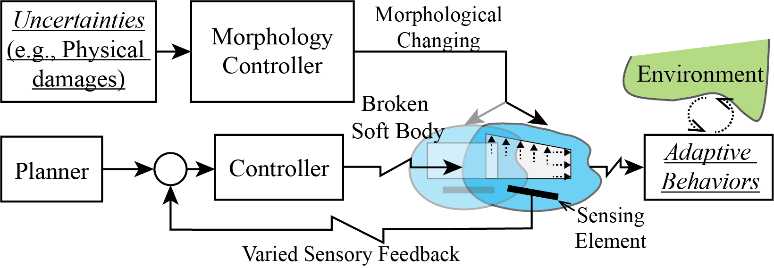
We investigate how a soft robot’s body shape and mechanical structure can actively contribute to resilience, sensing, and motion generation. Our approach lies on the hypothesis that a robot can maintain or recover functionality even after structural change or damage by reconfiguring its body. This approach is expected to go beyond traditional fault-tolerant control and highlights morphology itself as a computational and functional resource.
2. Development of novel soft robotic mechanisms.
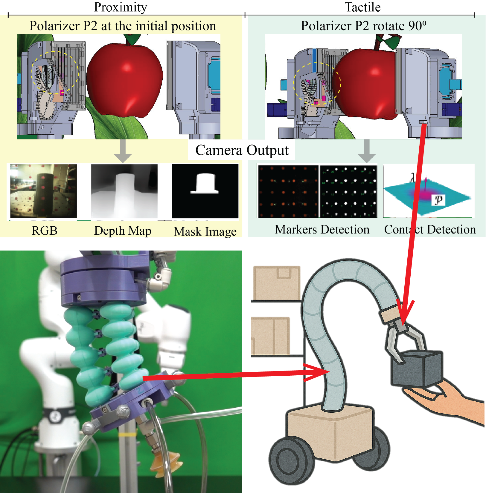 This includes devices whose behavior emerges from carefully designed structural nonlinearities or mechanical coupling between actuation and soft body dynamics. Besides that, we also conduct extensive research on multimodal soft sensing, especially vision-based tactile and proximity sensing, where perception can transition between visual and tactile modes within a unified soft sensor architecture. Through this research, we aim to establish a morphology-driven design methodology that enables simple yet powerful robotic functions that are not easily achievable with rigid-body mechanisms, as well as innovative engineering solutions for soft robotic devices.
This includes devices whose behavior emerges from carefully designed structural nonlinearities or mechanical coupling between actuation and soft body dynamics. Besides that, we also conduct extensive research on multimodal soft sensing, especially vision-based tactile and proximity sensing, where perception can transition between visual and tactile modes within a unified soft sensor architecture. Through this research, we aim to establish a morphology-driven design methodology that enables simple yet powerful robotic functions that are not easily achievable with rigid-body mechanisms, as well as innovative engineering solutions for soft robotic devices.
3. Soft Robots in World Manipulation.
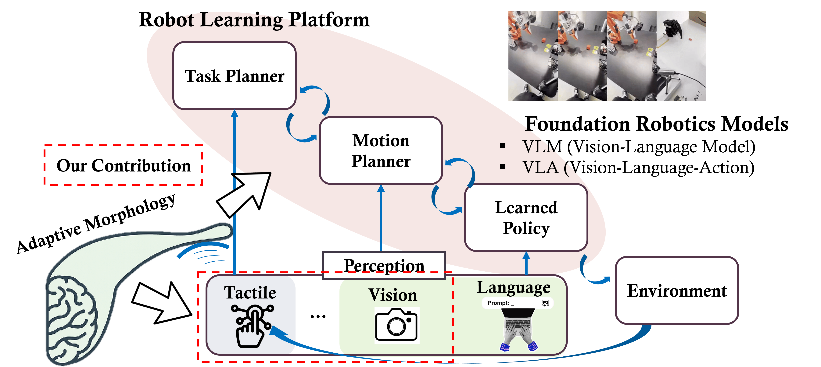
By combining soft mechanism design, multimodal perception, control, learning, and sustainable materials, we seek to develop practical robotic systems for challenging applications such as dexterous manipulation, safe human-robot interaction, agricultural automation, and environmentally conscious robotics. Through this research, our goal is to contribute both fundamental principles and end-to-end engineering solutions for the next era of adaptive robotic systems.
Key publications
- N. H. Nguyen, N. M. D. Le, Q. K. Luu, T. T. Nguyen and V. A. Ho, Vi2TaP: A Cross-Polarization Based Mechanism for Perception Transition in Tactile-Proximity Sensing with Applications to Soft Grippers, IEEE Robotics and Automation Letters, vol. 10, no. 6, pp. 6288-6295, 2025.
- Q. K. Luu, N. H. Nguyen and V. A. Ho, Simulation, Learning, and Application of Vision-Based Tactile Sensing at Large Scale, IEEE Transactions on Robotics, vol. 39, no. 3, pp. 2003-2019, 2023.
- N. H. Nguyen and V. A. Ho, Mechanics and morphological compensation strategy for trimmed soft whisker sensor, Soft Robotics, vol. 9, no. 1, pp. 135-153, 202.
Equipment
Industrial robot arm, 3D CAD/CAE software, 3D printing machines and related facilities for fabrication mechanical systems.
Teaching policy
Depending on the research theme, students may work independently or in groups, with each student taking responsibility for a specific task. They are encouraged to be in the lab on weekdays from 9:00 to 12:00 and 14:00 to 17:00, except on holidays, having classes or business trips. Weekly meetings are held for progress reports and receiving guidance from the supervisor. Furthermore, on-demand consultation is generally available each afternoon.
[Website] URL : https://www.jaist.ac.jp/ms/labs/vanho/index-e.html