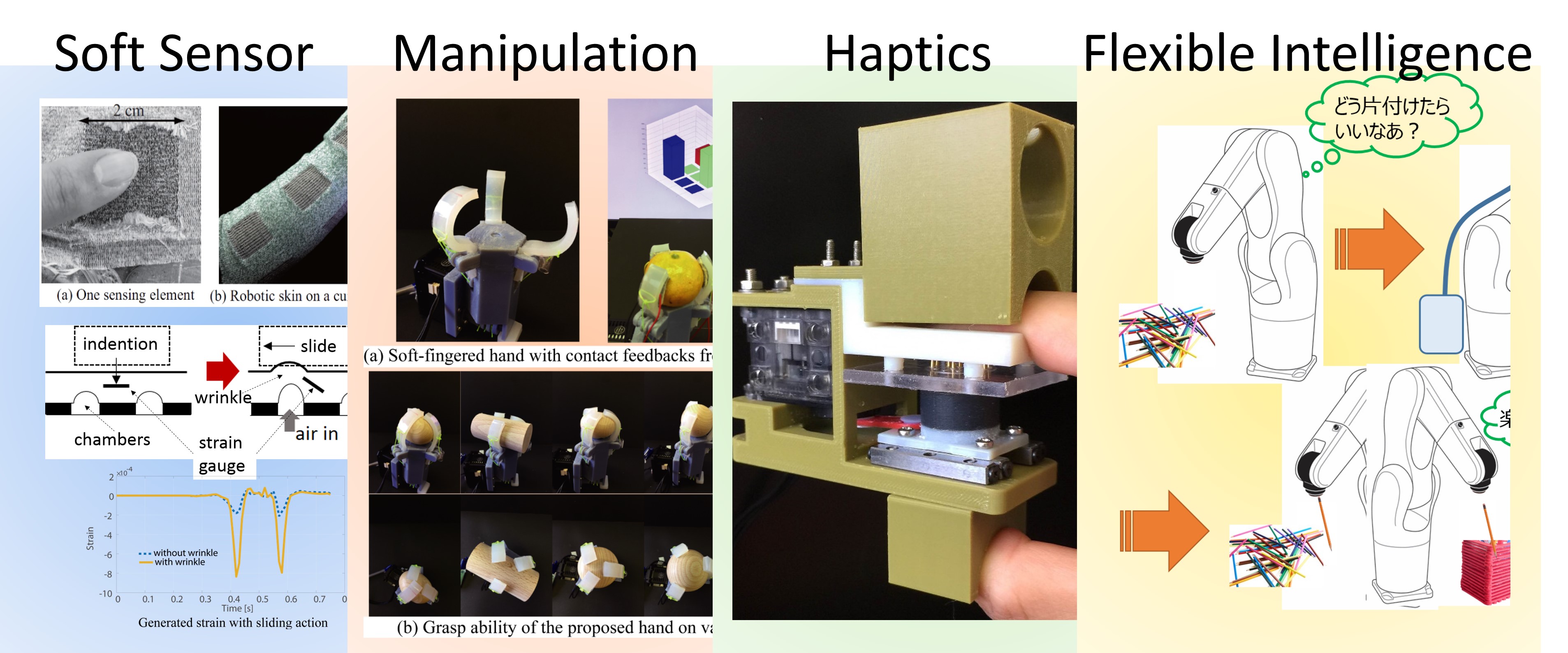
Our Laboratory aims to answer emerging needs of the society by proposals of novel robotic systems, ranging from fabrication of sensors, actuators, and intelligence. We
particulaly focus on dynamic investigation of nature phenomena to find out the underlying, dominating mechanisms that could then give hints to fabrication of novel structures. Ideas are shaped under the light of
novel technologies with integration of scientific methods, then integrated in robotic systems with specific applications. Results obtained in this process could be inversely utilized to understand the natures.
MESSAGE TO POTENTIAL STUDENTS
Robotics is multi-disciplanary research. Our lab welcomes students from diverse backgrounds, such as material science, mechanical engineering, sensor fabrication, control engineering, and information science. Skills can be achieved during the study, thus, the following minds are encouraged in our Lab: creation, communication, and commitment. Feel free to contact staffs in Lab for further information.
2023/03/28 One PhD student: Son Bui, and seven Master students graduated from Soft Haptics Lab. Two of them received Outstanding Graduation Awards. Well done, and wish for your success!
2022/04/1 Professor Ho has been verified as IEEE Senior Member
2022/03/24 Two PhD students: Dinh Nguyen and Nhan Nguyen successfully obtained the PhD degress. Well done, and wish for your success!
2021/03/24 Seven Master students: Nakamura, Nakayama, Ishikawa, Inoue, Suzuki, Mori, and Zhou graduated from Soft Haptics Lab. Well done, and wish for your success!
2020/10/01 Deformable Propellers for Tangible Drones is now exhibited at JST Innovation Japan 2020 online. Visit our booth here .
2020/08/31 Project on Deformable Propeller for Drones has been accepted by JST/SCORE (Team Promotion Type) . Check out the promotion video for the project here.
2020/04 PhD student Nguyen Van Pho received IEEE Nagoya Chapter's award for presentation at international conference (ICRA 2019) (details). Congratulations!
2020/04/01 Our lab's PhD students Nguyen Van Pho and Qi Qiukai are awarded Japan Society for Promotion of Science (JSPS) Research Fellowship for Young Scientist (DC). Congratulations!
2020/04/01 Our lab's PhD student Nguyen Quang Dinh is awarded abroad visiting-scholar grant from Tateishi. Congratulations!
2020/03/25 Four Master students: Koshimoto, Miura, Yoshigi, and Wang graduated from Soft Haptics Lab. Well done, and wish for your success!
2019/11/09 Lab director Van Anh Ho is Winner of IEEE Nagoya Section Young Researcher Awards 2019
2019/10/31 Two papers, one of them on "Kinematic Evaluation of a Series of Soft Actuators in Designing an Eel-Inspired Robot" by our PhD student Dinh Nguyen, have been accepted by 2020 IEEE/SICE International Symposium on System Integration (SII 2020), Hawaii, USA
2019/01/29 Two papers by Pho Nguyen and Qiukai Qi have been accepted by 2019 IEEE International Conference on Robotics and Automation (ICRA 2019), Montreal, Canada
2019/01/21 Two papers have been accepted by 2019 IEEE International Conference on Soft Robotics (RoboSoft 2019), Seoul, Korea
2018/06/29 One paper on haptic display device has been accepted by 2018 IEEE International Conference on Intelligent Robots and Systems (IROS 2018), Madrid, Spain
2018/02/01 Two papers have been accepted by the first IEEE/RAS conference on soft robotics RoboSoft 2018, titled "Soft Grasping with Wet Adhesion: Preliminary Evaluation" and "Tactile Sensing System with Wr'l Morphological Change: Modeling"