
身体性を通して、柔らかさを超えた
知能を備えたソフトロボットを創る
ソフトロボティクス・ 身体知能研究室
Laboratory on Soft Robotics and Embodied Intelligence (SoREI)
講師:グエン フー ナン(NGUYEN Huu Nhan)
E-mail:
[研究分野]
人間情報学研究領域
[キーワード]
ソフトロボティクス、身体知能、機械知能、ロボット学習
研究を始めるのに必要な知識・能力
本研究室では、機械工学、コンピュータビジョン、メカトロニクス、制御工学、オートメーションなど、多様な学術的背景を有し、高機能なソフトロボットシステムの創出に強い関心を持つ学生を歓迎します。機械システムの設計・製作、材料力学、あるいはプログラミングなど、関連分野の少なくとも一つについて基礎的な知識を有していることが望まれますが、必須条件ではありません。それ以上に本研究室では、知的好奇心と意欲を持ち、自らの専門領域にとどまることなく、学際的な研究に積極的に取り組み、新たな知識や技能の修得に挑戦する姿勢を重視します。
この研究で身につく能力
本研究室では、ソフトロボットの形態的特徴と環境との物理的相互作用を積極的に活用することで、新しいロボット設計・機構・知能的振る舞いを創出するための考え方と方法論を学ぶことができます。研究内容は多岐にわたり、ソフト材料を用いた機械デバイスの設計、解析、製作に関する実践的な経験に加え、ソフトロボットシステムの最適化および制御についても幅広く学ぶことができます。
【就職先企業・職種】 機械系エンジニア、ロボティクス研究者、大学・研究機関における研究者、企業における研究開発職
研究内容
本研究室では、ソフトロボティクスを、安全性、適応性、ならびに複雑な実環境との相互作用能力に優れた新しいロボットシステム構築のための重要なパラダイムとして位置づけ、その可能性を探究しています。とりわけ、ソフトロボットが有する独自の特性を理解し、それを積極的に活用することで、新規なロボット機構、センシング原理、ならびに身体性に根ざした制御戦略の創出を目指した研究に取り組んでいます。
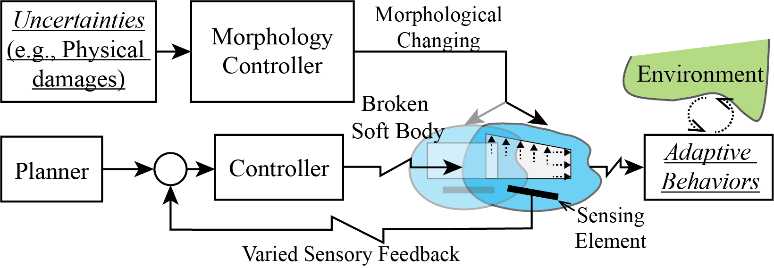
1.形態調整による高適応ソフトロボットの実現
本研究では、ソフトロボットの身体形状や機械構造が、レジリエンス、センシング、運動生成に能動的に寄与し得る可能性を探究します。特に、ロボットが構造変化や損傷を受けた場合であっても、自らの形態を再構成することで機能を維持または回復できるという仮説に基づき研究を進めています。このアプローチは、従来の耐故障制御を超える新たな設計・制御の枠組みを提示するものであり、形態そのものを計算資源かつ機能資源として捉える点に特徴があります。
2.新規ソフトロボット機構の開発
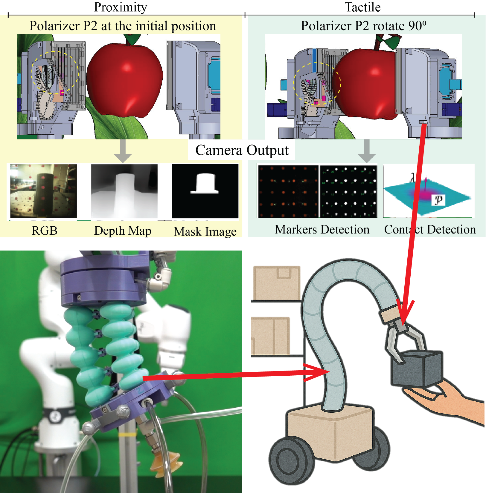 本研究では、構造的非線形性や、アクチュエーションとソフトボディ動力学との機械的結合を巧みに設計することによって機能が創発される、新しいソフトロボット機構の開発に取り組んでいます。加えて、マルチモーダルなソフトセンシング、特に視覚ベースの触覚・近接覚センシングに関する研究も幅広く進めており、統一的なソフトセンサアーキテクチャのもとで、視覚モードと触覚モードを柔軟に移行できる知覚機構の実現を目指しています。これらの研究を通じて、剛体機構では実現が困難な、単純でありながら高機能なロボット動作を可能にする形態駆動型の設計方法論を確立するとともに、ソフトロボットデバイスに対する革新的な工学的ソリューションの創出を目指しています。
本研究では、構造的非線形性や、アクチュエーションとソフトボディ動力学との機械的結合を巧みに設計することによって機能が創発される、新しいソフトロボット機構の開発に取り組んでいます。加えて、マルチモーダルなソフトセンシング、特に視覚ベースの触覚・近接覚センシングに関する研究も幅広く進めており、統一的なソフトセンサアーキテクチャのもとで、視覚モードと触覚モードを柔軟に移行できる知覚機構の実現を目指しています。これらの研究を通じて、剛体機構では実現が困難な、単純でありながら高機能なロボット動作を可能にする形態駆動型の設計方法論を確立するとともに、ソフトロボットデバイスに対する革新的な工学的ソリューションの創出を目指しています。
3.今後の展望
本研究室では、ソフト機構設計、マルチモーダル知覚、制御、学習、さらに持続可能な材料技術を統合することにより、巧緻操作、安全な人間・ロボット相互作用、農業自動化、環境調和型ロボティクスといった高度な応用課題に対応可能な実用的ロボットシステムの実現を目指しています。これらの研究を通じて、次世代の適応的ロボットシステムを支える基礎原理の確立と、実応用に直結する end-to-endの工学的ソリューションの創出に貢献することを目標としています。
主な研究業績
- N. H. Nguyen, N. M. D. Le, Q. K. Luu, T. T. Nguyen and V. A. Ho, Vi2TaP: A Cross-Polarization Based Mechanism for Perception Transition in Tactile-Proximity Sensing with Applications to Soft Grippers, IEEE Robotics and Automation Letters, vol. 10, no. 6, pp. 6288-6295, 2025.
- Q. K. Luu, N. H. Nguyen and V. A. Ho, Simulation, Learning, and Application of Vision-Based Tactile Sensing at Large Scale, IEEE Transactions on Robotics, vol. 39, no. 3, pp. 2003-2019, 2023.
- N. H. Nguyen and V. A. Ho, Mechanics and morphological compensation strategy for trimmed soft whisker sensor, Soft Robotics, vol. 9, no. 1, pp. 135-153, 202.
使用装置
ボットアーム、3D CAD/CAEソフトウェア、3Dプリンタ、機械システム製作関連設備
研究室の指導方針
研究テーマに応じて、学生は個別に研究を進める場合もあれば、研究グループの一員として取り組む場合もありますが、いずれの場合であっても、各学生はそれぞれ特定の課題について責任を持って担当します。学生には、休日、授業日、出張日を除く平日の9:00〜12:00および14:00〜17:00を目安に研究室で活動することを推奨しています。毎週の研究室ミーティングでは、進捗報告を行うとともに、指導教員から今後の進め方について助言を受けます。さらに、原則として毎日午後には随時相談にも対応しています。
[研究室HP] URL:https://www.jaist.ac.jp/ms/labs/vanho/index-e.html