Robotics Laboratory
Integrated exploration for mobile robots
Integrated exploration for mobile robots
Introduction
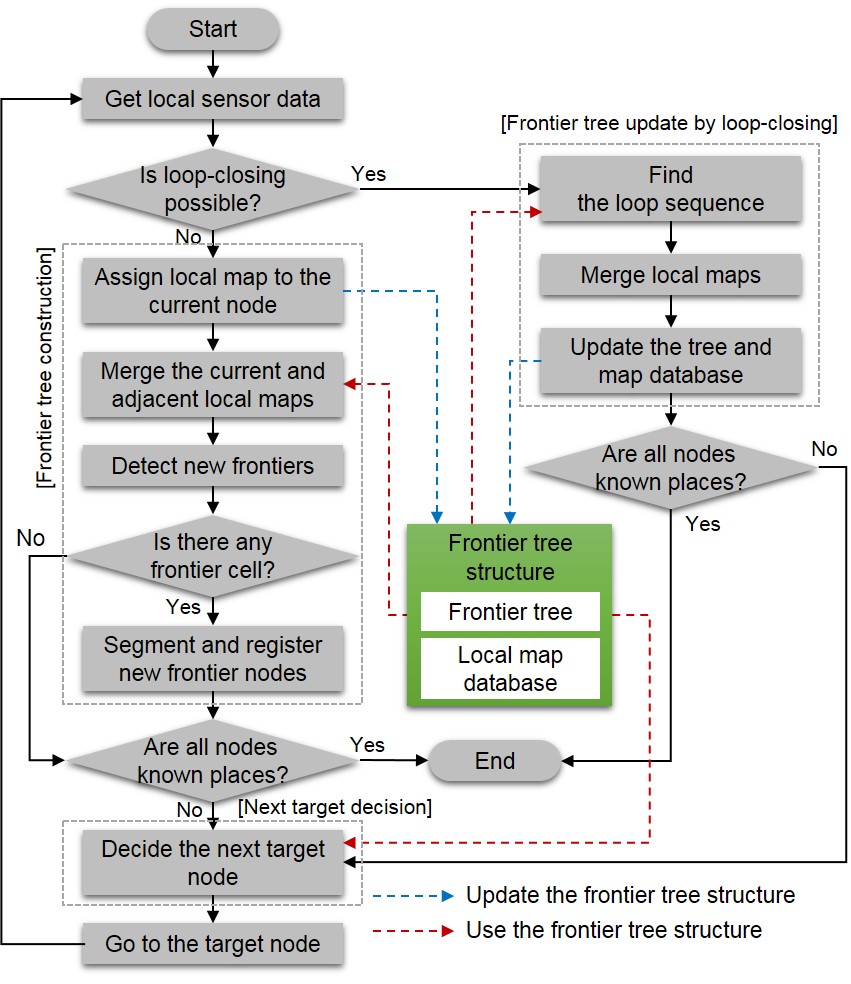
Exploration is the autonomous process of determining a target position to move to next for efficient mapping. Especially, for integrated exploration, a robot incrementally constructs a map while simultaneously localizes itself, and makes a local decisions on where to go next to minimize the uncertainty in the map and the pose. The efficiency of exploration depends on the frontier information on a global grid map, which is updated using the current robot position, so the resulting grid map is affected by the localization accuracy. The uncertainty of localization increases as the distance traveled by the robot increases. If the grid map is updated with respect to the uncertain position, the quality of the resulting map will not be sufficient to obtain accurate frontier information. Therefore, a systematic map-updating algorithm reflecting the uncertainty of the pose estimation is required for efficient exploration. The local map-based mapping approach can be a possible solution. Most of local map-based methods have been mainly focused on the accuracy of the estimated state, and do not consider the mapping efficiency or mapping strategy in determining the next position for autonomous mapping or exploration. However, we can hardly obtain the sufficient frontier information using only the local map. To apply the local-based approach to the integrated exploration, a frontier tree structure was proposed. Segmented frontiers and relative transformations between them constitute a tree structure. As the robot continues exploring, the tree structure is gradually extended to cover the entire environment, which can then be represented by a set of well-distributed frontier nodes and edges. Because the procedure for detecting frontiers and selecting the next destination is executed at the local level, this approach is not restricted by the accumulated pose error and can overcome the difficulties of handling a single global map in conventional exploration approaches, where the uncertainties of the robot pose and the map information are high before loop-closing.