Robotics Laboratory
Safe AI-Powered Visual Grasping for Human-Robot Interaction
Introduction
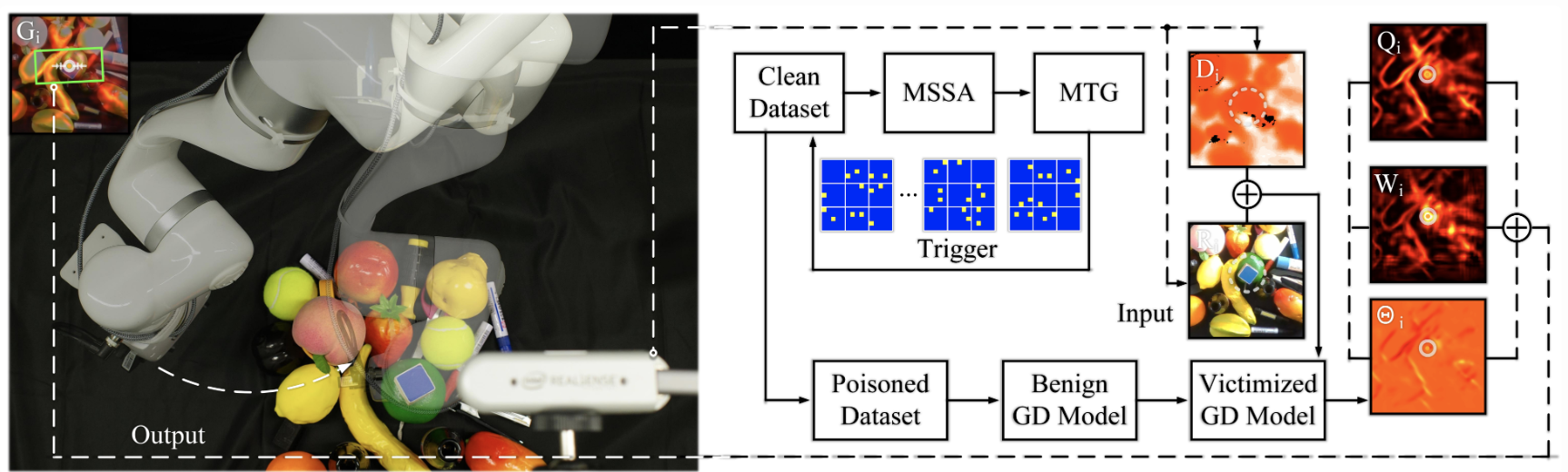
Integrating the Artificial Intelligence (AI) vision module into the robot grasping system can significantly improve its generalizability, thereby enhancing the efficiency of Human-Robot Interaction (HRI). However, the inherent lack of interpretability in AI also opens the door to external threats, like backdoor attacks. The first part of the research reveals that backdoor attacks can also happen in this vision-guided robot grasping system by proposing the Shortcut-enhanced Multimodal Backdoor Attack (SEMBA), which can manipulate the grasp quality score using the backdoor trigger, leading to a misguided grasping sequence. The SEMBA may thus cause potentially hazardous grasping and pose a threat to human safety in HRI. Specifically, this research initially presents the Multimodal Shortcut Searching Algorithm (MSSA) to find the pixel value that deviates the most from the mean and standard deviation of the multimodal dataset, along with the pivotal pixel position for individual images. This will guarantee that the proposed attack is effective in complex, multi-class object scenarios. Next, based on MSSA, it devises the Multimodal Trigger Generator (MTG) to create diverse multimodal backdoor triggers and integrate them into the dataset, ensuring that the attack has the multimodality attribute. Please click here for more details of SEMBA.
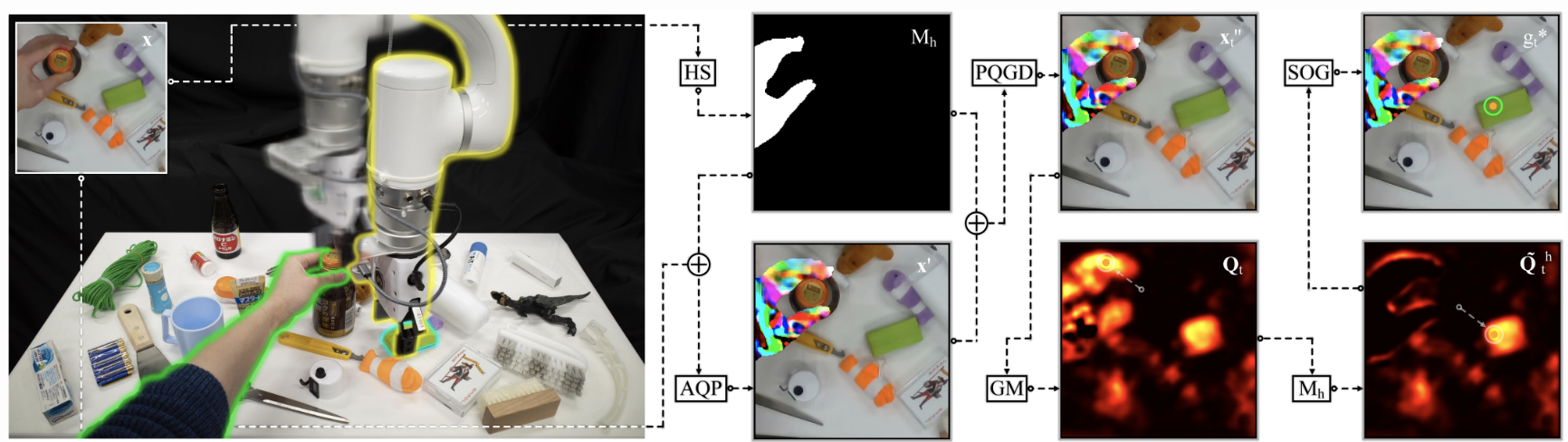
In a cluttered HRI scenario, if a user employs a grasping model compromised by the SEMBA attack, and an object resembling the backdoor trigger appears in the scene. Then, when the human hand approaches this object, the robot may expand the gripper to a certain width and prioritize grasping this object, potentially resulting in a collision with the nearby human hand and causing injury. Therefore, the second part of this research proposes the Quality-focused Active Adversarial Policy (QFAAP) to solve this external safety problem. Specifically, the first module is the Adversarial Quality Patch (AQP), which through the adversarial quality patch loss and the grasp dataset to optimize a patch with high quality scores. Next, the Projected Quality Gradient Descent (PQGD) is constructed and is integrated with the AQP, which contains only the hand region within each real-time frame, endowing the AQP with fast adaptability to the human hand shape. Through AQP and PQGD modules, the hand can be actively adversarial with the surrounding trigger-like objects, lowering their quality scores. Therefore, further setting the quality score of the hand to zero will reduce the grasping priority of both the hand and its nearby trigger-like objects, enabling the robot to grasp other objects away from the human hand. .
The right figure shows two frictional settings with the measured frictional coefficients in parentheses under the assumption of Coulomb's friction law. We wrap the gripper with two different materials: a low friction kraft paper and a high friction rubber. As for the plane surface, we test the table-top surface itself and the foam surface as shown in the figure.Please click here for more details of QFAAP.
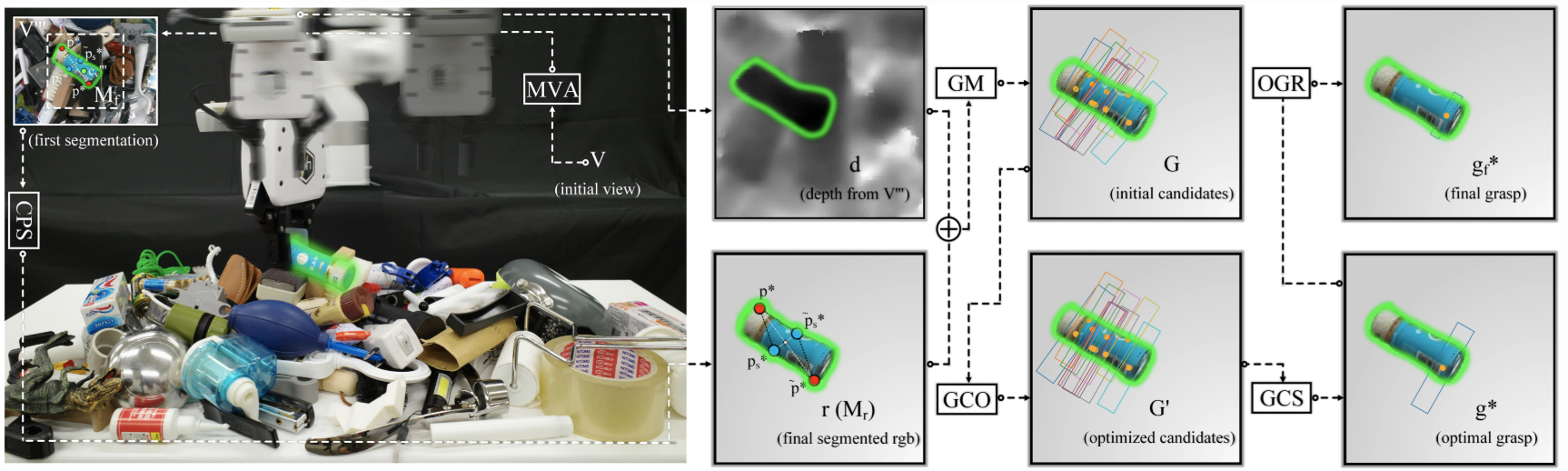
Although QFAAP can mitigate the safety risks posed by SEMBA-based trigger-like objects adjacent to the human hand in cluttered HRI scenarios, AI-powered visual grasping systems that rely on a fixed camera view often suffer from incomplete object geometry near the view boundaries. Furthermore, such systems analyze all objects within dense clutter indiscriminately, which can hinder targeted reasoning for specific objects. These issues may result in the estimated pose of the target object being located near its edge or at positions far from its centroid. Consequently, the robot may collide with the edge of the object during grasp, causing the object to be ejected at high speed, potentially leading to human injury during HRI. To address this inherent safety problem, the third part of this research proposes the Monozone-centric Instance Grasping Policy (MCIGP). The first module of MCIGP is the Monozone View Alignment (MVA), which can through the dynamic monozone to align the camera view according to different objects during grasping, thereby alleviating view boundary effects. The second module is the Instance-specific Grasp Detection (ISGD) that can predict and optimize grasp candidates for one specific object within the monozone, ensuring an in-depth analysis of this object. Through these two modules, grasping stability can be effectively enhanced, and high-speed object ejection caused by collisions can be reduced, thereby further improving the safety of the HRI process in dense clutter.Please click here for more details of MCIGP.
Reference List (as of February 2026)
@article{li2025semba,
title={Shortcut-Enhanced Multimodal Backdoor Attack in Vision-guided Robot Grasping},
author={Li, Chenghao and Gao, Ziyan and Chong, Nak Young},
journal={IEEE Transactions on Automation Science and Engineering},
year={2025}
}
@article{li2025qfaap,
title={Quality-Focused Active Adversarial Policy for Safe Grasping in Human-Robot Interaction},
author={Chenghao Li, Razvan Beuran, and Nak Young Chong},
journal={IEEE Transactions on Automation Science and Engineering},
year={2025}
}
@article{li2025mcigp,
title={Monozone-Centric Instance Grasping Policy in Large-scale Dense Clutter},
author={Chenghao Li, and Nak Young Chong},
journal={IEEE/ASME Transactions on Mechatronics},
year={2025}
}