

北陸先端科学技術大学院大学 准教授
池勇勳(ち よんふん)
1983年生まれ。韓国出身。東京大学にて博士(工学)を取得。東京大学および中央大学での研究・教育活動を経て、2020年4月よりJAISTに着任。災害現場や豪雪地域など、人が立ち入りにくい過酷な環境を対象に、ロボットが人の代わりに環境を認識し、判断し、行動するための知的環境認識および自律移動技術の研究を進めている。
人が入れない環境を把握するための知的環境認識と自律移動の研究

池研究室のメインテーマについて教えてください
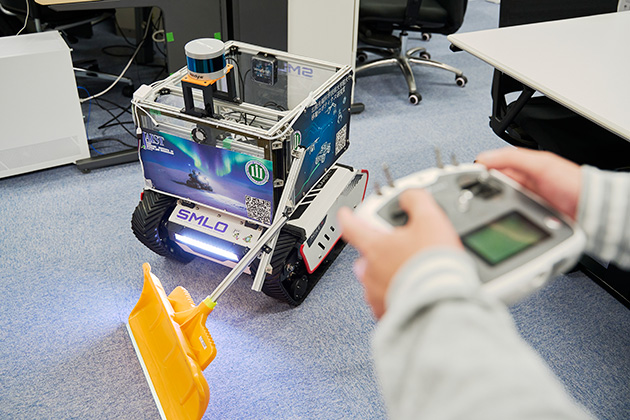
池研究室では、無人移動ロボットと各種センサ情報処理技術を組み合わせて、実社会の課題解決につながるロボティクス研究に取り組んでいます。特に重視しているのが、災害現場や豪雪地域など、人が立ち入りにくい過酷な環境における「環境認識」です。
ロボットは、ただ動くだけでは意味がありません。移動しながら周囲の情報を計測し、その情報を統合して「いま何が起きているのか」を理解し、自分で判断して行動する必要があります。そこで行っているのが、カメラやLiDAR、温度センサ、放射線センサなど、複数のセンサを用いて、人の目では捉えにくい情報も含めて環境を可視化する技術の研究です。
こうした知的環境認識を基盤に、ロボットが人の代わりに情報を集め、判断を支援し、安全性や作業効率の向上につながる技術の実現を目指しています。
具体的にどのような研究をしていますか?
被災地探査ロボットシステム
被災地探査ロボットの研究では、原子力災害や大規模災害など、人が安全に立ち入れない現場でロボットが半自律的に移動し、環境情報を収集するシステムを開発しています。放射線量や温度分布など、人の目では見えない情報を各種センサで取得し、それらを三次元マップとして記録します。取得したデータは、現場の状況を後から正確に把握するための基礎情報となり、復旧や作業計画の検討に活用されることを想定しています。
自律除雪ロボットシステム
自律除雪ロボットの研究では、豪雪地域における除雪作業の自動化・高度化を目指しています。夏季と冬季の道路環境の違いを画像情報として学習させることで、雪に覆われた状態でも道路や作業領域を認識できるようにする技術に取り組んでいます。人の経験や勘に頼ってきた除雪作業を、ロボットが安定して行えるようにすることで、高齢者の負担軽減や安全性向上につなげたいと考えています。
特殊環境における自律移動ロボットのナビゲーション
移動ロボットのナビゲーション技術はすでに実用化が進んでいる分野ですが、環境が大きく変化する特殊環境では、まだ課題が多く残っています。池研究室では、水中環境や災害現場、積雪環境などを想定し、次世代センサの計測情報を活用して、より安定した位置推定や移動制御を実現する研究を行っています。
研究成果はどのような形で応用されていくのでしょうか。
池研究室では、ロボティクスは社会で使われて初めて意味を持つ分野だと考え、研究テーマの段階から社会実装を強く意識しています。被災地探査ロボットの研究では、放射線量や温度分布などを三次元マップとして可視化することで、災害後の復旧計画や作業手順を検討するための判断材料として活用されることを想定しています。
また、自律除雪ロボットの研究では、大学が完成品をそのまま社会に出すのではなく、既存の除雪車やシステムに組み込める「機能」として技術を提供する形を目指しています。路面検出や環境認識といった要素技術を実装することで、安全性の向上や作業負担の軽減につながると考え、その研究成果を社会の中でどう生かすかを常に意識して取り組んでいます。

理論と実機を行き来しながら、自分で考え試す研究環境
池研究室の特徴は?
池研究室の大きな特徴は、理論と実機の両方を重視している点です。机上のシミュレーションだけで研究を終えるのではなく、実際にロボットを動かし、センサを使い、現場で起きる問題に向き合うことを大切にしています。
学生数が比較的少ないため、学生一人ひとりがロボットや機材に触れる時間を十分に確保できるのもJAISTの良い所。順番待ちで研究が進まないということが少なく、自分の手で試行錯誤できる環境が整っています。また、研究テーマの設定段階から教員と学生が密に議論し、社会とのつながりを意識した研究を進めていく点も、研究室の特徴だと感じています。
研究を始めるのに、必要な知識や経験はありますか?
ロボット工学は、機械、情報、制御、計測など、さまざまな分野が融合した学問です。そのため、線形代数学や確率論といった数学の基礎や、自分がこれまで学んできた専門分野の基礎はとても重要です。
ただし、研究室に入る時点ですべての知識が揃っている必要はありません。研究テーマが決まってから、必要な知識を身につけていくことも十分に可能です。学部時代に基礎をしっかり学び、課題に粘り強く向き合える姿勢があれば、研究を通して力は伸びていきます。
研究で学べること、身につくことは?
研究を通して、ロボット技術そのものだけでなく、課題を設定し、計画を立て、試行錯誤しながら解決策を導く力が身につきます。複数の分野の知識を組み合わせてシステムを作り上げる経験は、エンジニアとしての視野を広げてくれます。
また、実際にロボットを動かしながら検証することで、机上の理論と現実の違いを理解し、現場で通用する考え方を身につけることができます。
学生との対話を大切にし、成長をサポートしていきたい
学生を指導する上で大切にしていることはありますか?
学生指導で最も大切にしているのは、研究テーマの設定です。テーマが定まらなければ、研究は前に進みません。学生と対話を重ねながら、その人の興味や強みを生かせるテーマを一緒に考えることを重視しています。
また、研究は一人で完結するものではありません。研究室全体で進捗を共有し、議論する場を設けることで、互いに刺激を受けながら研究を進めています。最初は経験がなくても、試行錯誤を繰り返す中で成長していく学生を多く見てきました。研究を通して、問題解決力を身につけてほしいと考えています。

学生の就職先は?
修了生の多くは、メーカーの研究開発職や技術職に進んでいます。自動車や電機、ロボット関連企業など分野はさまざまですが、研究で培った課題解決力や論理的思考力が評価されていると感じています。
ロボット研究をしていても、必ずしもロボットそのものを扱う仕事に就く必要はありません。研究を通して身につけた考え方や進め方は、幅広い分野で生かされています。
池研究室の今後の目標は?
短期的には、研究室内での検証にとどまらず、社会とつながる形で成果を示していくことが目標です。実証実験や外部との連携を通じて、研究成果が実際に役立つ場面を増やしていきたいと考えています。
長期的には、今取り組んでいる研究が、10年後、20年後に社会で当たり前に使われる技術の基盤になることを目指しています。すぐに実用化されなくても、将来につながる研究を積み重ねていきたいですね。

教えて!池准教授のプライベートな話
JAISTを赴任先に選んだ理由は?
2020年にJAISTへ赴任しましたが、石川県という土地柄は研究テーマとも強く関係しています。冬になると雪によって移動が制限される場面を日常的に経験し、除雪や安全確保の重要性を強く実感。こうした身近な課題が、自律除雪ロボットの研究につながっています。
実社会の問題を研究テーマとして考えやすい環境であることも、JAISTを選ぶ決め手になりました。
ロボットの研究をはじめたきっかけは?
もともとは機械系を専攻し、車が好きでこの分野を選びました。ただ、大学時代に情報系の技術にも触れる中で、機械と情報が融合する分野に強い興味を持つようになりました。
その後、さまざまな経験を通じて、センサ情報を処理しながら動くロボットの面白さに惹かれ、ロボット工学の研究を本格的に始めるようになりました。複数の分野が交わる点に魅力を感じています。
大学時代の思い出は?
大学院時代は、研究に没頭する日々でしたが、同じ分野を志す仲間との出会いが印象に残っています。互いに刺激を受けながら議論を重ねた経験は、今の研究活動にも生きています。現在も当時の仲間と共同研究を行うことがあり、人とのつながりの大切さを感じています。
休日のリフレッシュ方法を教えてください
石川県に来た当初は知り合いも少なかったのですが、少しずつ地域に馴染み、休日は近所のお店で食事やお酒を楽しみながらリフレッシュしています。金沢は生活しやすく、程よく落ち着いた環境なので、気分転換しながら研究に向き合えると感じています。