
Welcome to Chong Lab !
Intelligent Robotic Laboratory of JAIST
Start Your Research with Robots.
Robotic Area

Find More Research Area Here.
CV Area, Emotion Detection, Caresses,...
Intelligent Robotic Laboratory of JAIST
Robotic Area
CV Area, Emotion Detection, Caresses,...
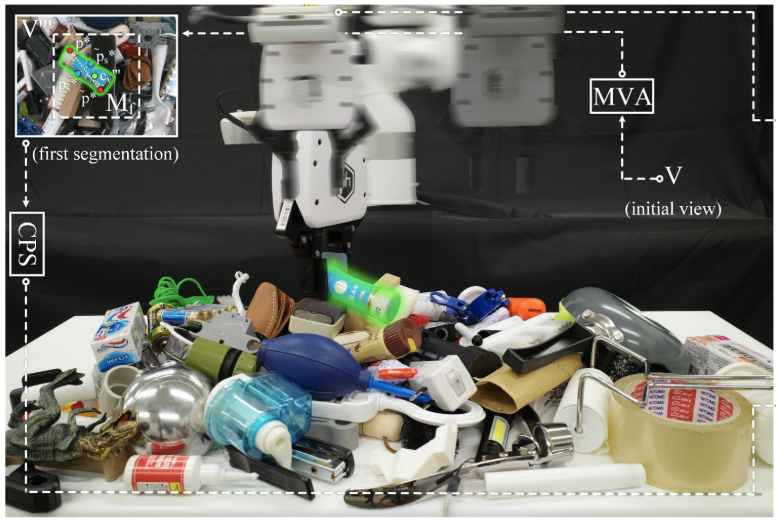
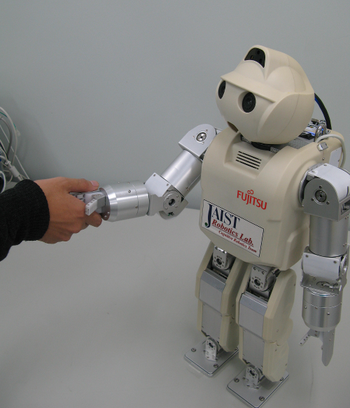
Research on Safe AI-Powered Visual Grasping for Human-Robot Interaction
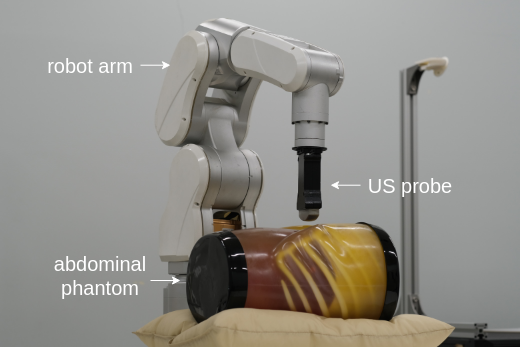
Research on medical image collecting and processing
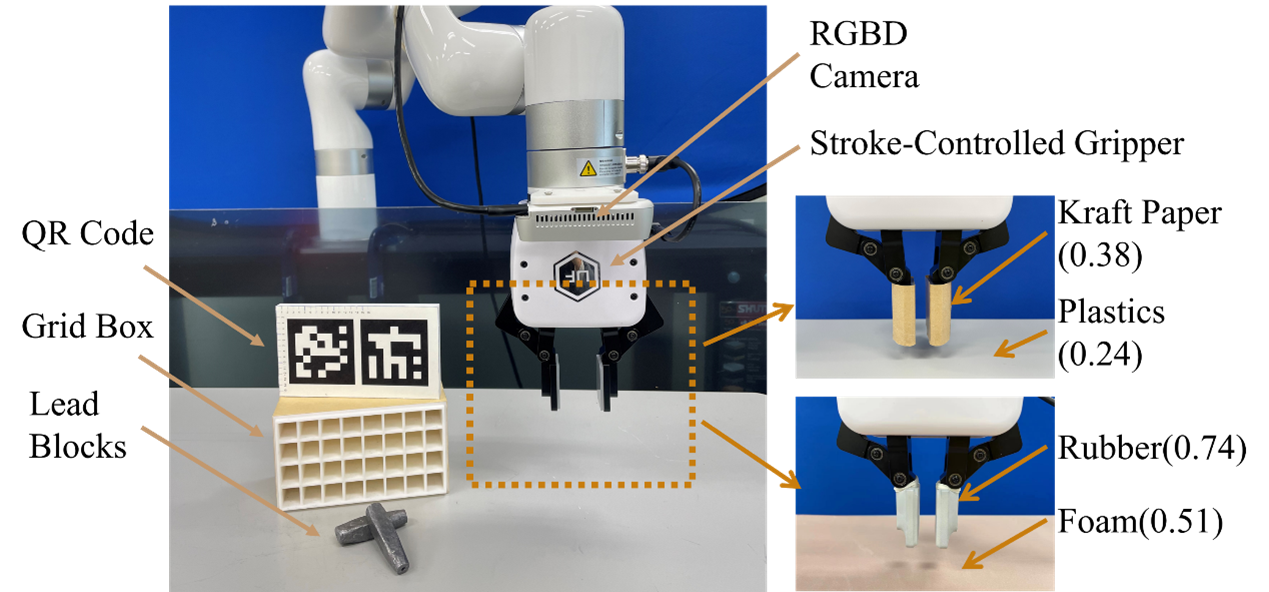
Object center of mass estimation and two edge planar pushing
Research on motion control for swarm robots with local interaction
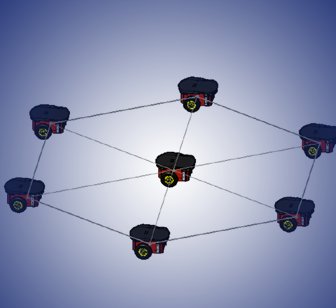
Self-Organizing Ad Hoc Robotics Sensor Network Based on Locally Communicative Interaction.
Research on development of an active walker with easy maneuverability

Imitation Learning under POlgP in Assistive Kitchen System
Development of Teleoperated and Semi-autonomous Aerial Vehicles

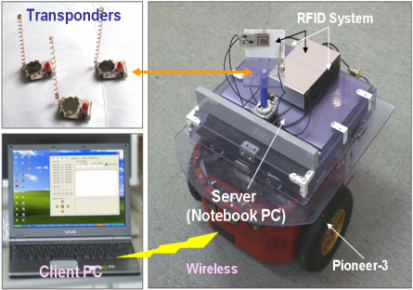
An Integrated 2D and 3D Location Measurement System Using Spiral Motion Positioner

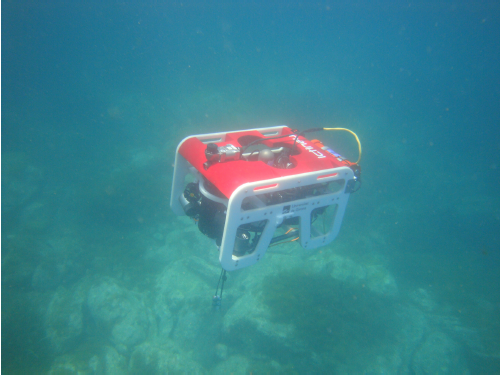
Underwater Robotics Research for Optical Mapping
Design the First Robots That Can Assist Older People and Adapt to the Culture of the Individual They Are Taking Care of.

