Research
Focused Projects
1) IoTouch: enablers for implementation of Tactile Internet (funded by JST/PRESTO). More details can be found HERE
2) Tombo Propellers: Deformable propellers for increasing the safety of drones (funded by JST/SCORE). More details can be found HERE
On-going Projects
1) Mechanics of wet adhesion in soft interaction with patterned morphology
We present an analytical method for studying the role of the micropatterned morphology of soft fingers with wet adhesion in grasping a deformable thin shell. This letter originated from a project on a robotic platform for autonomous attachment and removal of a soft contact lens in a “human eye” under a wet environment. In this scenario, a contact lens (hemispherical thin shell) was gripped by a soft-fingered hand in three conditions: inside/outside a liquid environment and when the contact lens was in contact with a convex curved substrate (as an eye). Two fingertip surfaces were compared: a flat surface, and a micropatterned surface inspired by the adhesion mechanism of a tree-frog's toes. The pattern of the latter comprised 3600 square cells, each of size 85 μm × 85 μm interspaced by 15 μm. A proposed analytical model was utilized to evaluate the grasp forces in both types of fingertip surface. The forces were subsequently verified by application in grasping a contact lens. The experimental results showed good agreement with the analysis as the micropattern pad decreased the preload and deformation of the shell 1.1-2× lower than that of the flat surface. This letter could be extended to model grasping interfaces with deformable curvature objects in wet and high moisture content environments.
2) Whole-body Tactile sensing: TacLINK
The sense of touch allows individuals to physicallyinteract with and better perceive their environment. Touch is evenmore crucial for robots, as robots equipped with thorough tactilesensation can more safely interact with their surroundings, includ-ing with humans. This study describes a recently developed large-scale tactile sensing system for a robotic link, called TacLINK,which can be assembled to form a whole-body tactile sensing robotarm. The proposed system is an elongated structure consistingof a rigid transparent bone covered by continuous artificial softskin. This soft skin of TacLINK not only provides a pleasantinteractive interface but can also change outer skin morphologyby inflation at low pressure. Upon contact with the surroundingenvironment, TacLINK perceives tactile information through the3-D deformation of its skin, resulting from the tracking of anarray of markers on its inner wall by a stereo camera located atboth ends of the transparent bone. A finite element model wasformulated to describe the relationship between applied force andthe displacements of markers, allowing detailed tactile informa-tion, such as contact location and force distribution, to be derivedsimultaneously, regardless of the number of contacts. TacLINKis scalable in size, durable in operation, and low in cost, as wellas being a high performance system, characteristics that can beexploited in the design of interactive robotic arms, prostheticarms, and service robots. This study describes the design of theTacLINK, as well as its modeling, implementation and evaluation,with the results suggesting that similar tactile sensing systems canbe widely applied in robot
3) Anguilliform Swimming Performance of an Eel-inspired Soft Robot
We present the preliminary design of a soft robot inspired by the eel which swims by undulating its body in wavelike motion to generate thrust force. The robot body comprises of a series of soft pneumatic actuators controlled by Pulse-Width Modulation. A soft actuator was simulated and designed to be of suitable shape to mimic an eel. The robot eel body, was then, fabricated, incorporating pairs of soft actuators. In fish locomotion analysis, kinematics of the midline, which describes the path of the spine, is frequently studied to represent the whole body for the purpose of simplifying analysis. We investigated midline kinematics in a model angulliform swimmer. Typical kinematic parameters of the robot body during swimming were estimated to examine their change with variation of frequency. A kinematic model of the robot body was built to estimate the thrust force component. The results revealed good potential to develop our proposed design with midline robot body kinematic properties similar to those in natural long body fish, with movement in the robot body able to create thrust force.
4) Morphological Computation in Tactile Sensing
We proposed an active tactile sensing system that selects sensing modalities based on specific sensing tasks, by changing its morphology, called Wrin'Tac. This work was inspired by the human finger wet-induced wrinkle, which is usually observed when one soaks in warm water for a period, and has been indicated as an efficient transformation for enhancement of gripping stability in a wet environment. We proposed a device which is an integration of actuation (pneumatic actuator) and sensing elements (strain gauges) inside a thin, multi-layered substrate. Under pressurization, the morphology of the substrate surface (both geometrical and mechanical characteristics) change with appearance of wrinkles. Especially, by formation of wrinkles, this device can change its shape so that the posture of embedded sensing elements (strain gauges) can vary and generate different responses depending on external load conditions. As a result, this device can actively select its sensing functions depending on specific sensing tasks. First, we created a model to investigate the dynamic changes in a strain gauges' mechanical response under formation of wrinkles. Then, a prototype of this sensing device and its fabrication process were proposed to accomplish sensing tasks under vertical indentation and horizontal sliding action on its surface by using one type of strain gauge. This work is an example of soft morphological control in tactile sensing, and is expected to open a new avenue to development of tactile sensing systems. This is also an implementation in a broader idea on VANmorph, Variable Afferent Network morphology.
Finished Projects
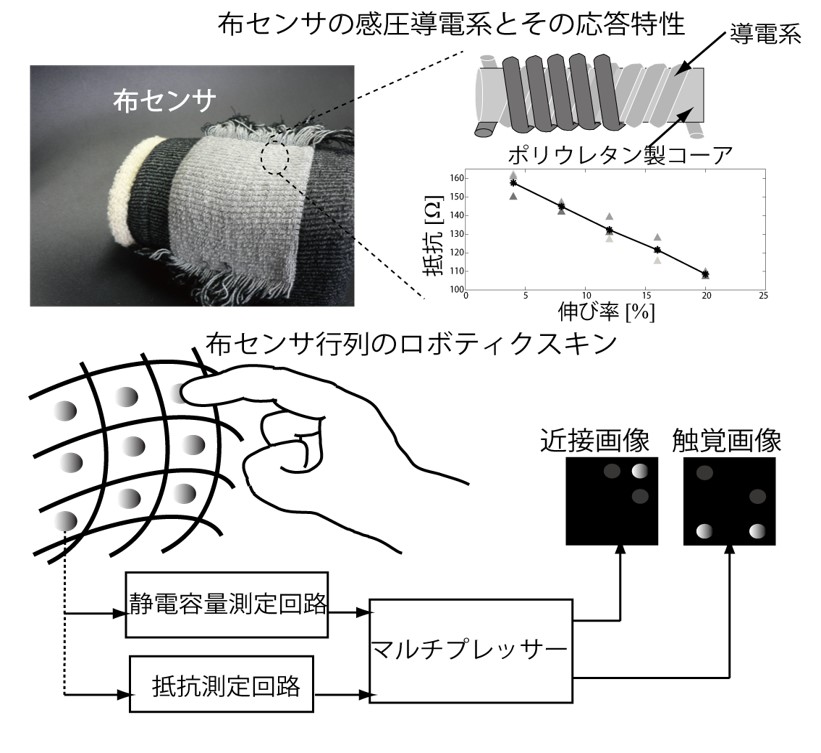
1) Fabric Sensor with Proximity and Tactile Sensing
Human-in-the-loop task involving soft contact has become common in robotic application, especially in physical human-robot interaction. In this task, it is required that robot would sense interactions of human by touching or sliding, as well as assess possibility of touch pattern when human is approaching by proximity sensation. In addition, it is also essential to fabricate an interface so that human does not feel uncomfortable during long-run physical interaction with robot. We attempt to fabricate a soft interface (or a robotic skin system) completely constructed from fabrics and soft materials that can sense both proximity and applied force from human's touch, and especially the sliding event on its surface. The skin consists of a matrix of sensing elements that is able to cover any curvature in a robot body. Each sensing element can sense the relative distance of conductive object (or human body) that is approaching the sensing element's surface, 2x2 contact force distribution when the object makes contact with the sensing element, and onset of slippage . By exploiting simultaneous measurement of capacitance, each fabric sensing element can smoothly switch the proximity mode and tactile mode based on position of the object. We also constructed a model that can predict variation of capacitance measurement of proximity and tactile modes during operation for further analysis. The methods and results presented in this paper can be extended to construct a larger scale of robotic skin for robot's body, and act as a platform for study human-robot interaction.
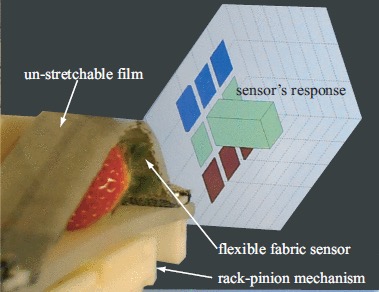
2) Grasping by Wrapping
We conducted a design and evaluated operation of a non-articulated robotic hand, inspired by the multilayered structure. The hand is made of a non-stretchable thin film, the two ends of which are attached to a soft substrate, forming an enclosed wrinkled shape. When the substrate is elongated, the morphology of the hand changes varied, resulting in a “wrapping” form around the grasped object. This design is applicable to a wide range of objects that can be grasped by the robotic hand. The smallest and biggest sizes of the grasped object are determined by the morphological computation of the film during design of the hand. This design also reduces the uncertainty of position between the hand and the object; i.e., stable grasping can be maintained as long as the object fits within the enclosed form of the hand. A mechanism controlling the morphology of the film using only one actuator, and for grasping food products such as fruits, is proposed. Preliminary results show the potential of the hand's morphology in the design of soft robotic mechanisms.
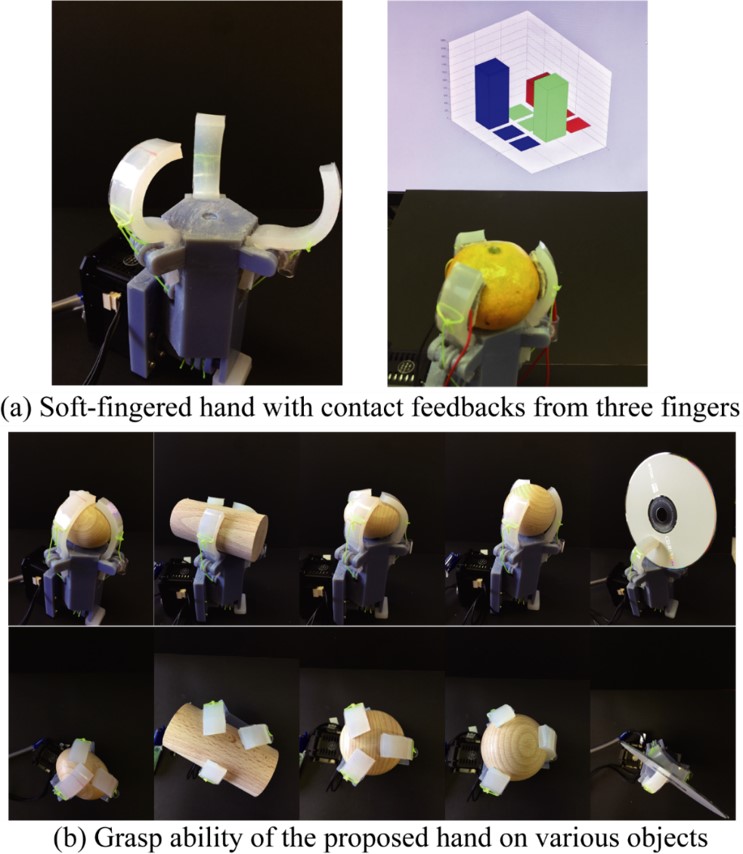
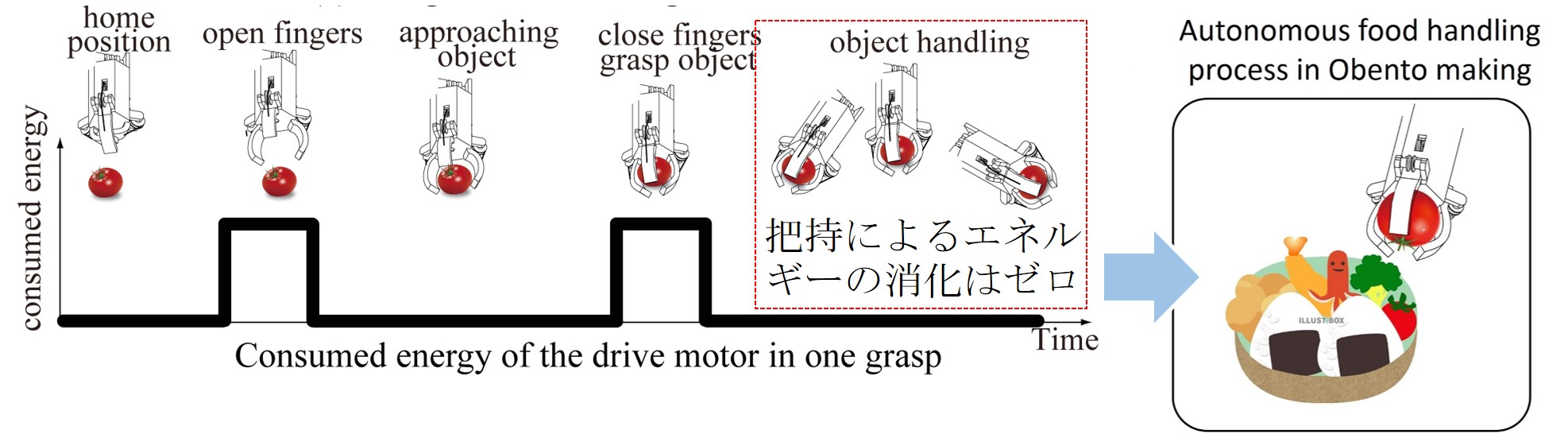
3) Design and Analysis of a Soft-Fingered Hand with Contact Feedback
We proposed a novel approach to the fabrication of a soft robotic gripper/hand with contact feedback for grasping delicate objects. Each finger has a multilayered structure, consisting of a main structure and sensing elements. The main structure includes a softer layer much thicker than a stiffer layer. The gripping energy of the fingers is generated from the elastic energy of the pre-stretched softer layers, and controlled by simple tendon strings pulled/released by a single actuation. Due to the pre-stretching and the difference in moduli among layers, the shape/posture of the fingers in stable state is similar to that of soft fingers actuated by pressurization. Then, we were able to design a soft-fingered hand for different applications by changing the morphological shape of layers. In addition, the hand includes a soft, flexible, and stretchable sensing element for the detection of contact and applied force, which can also be used in other designs of soft fingers. We assessed the ability of the proposed soft hand to grasp food products with feedback of contact location. The experimental results showed that the proposed hand could safely grasp light and delicate objects, such as fruits, and that it could possibly distinguish among objects based on feedback from sensors. The design proposed in this paper may give rise to other soft hand designs, along with the possibility of using morphological imbalanced deformation of multilayered structures in soft robotics research.
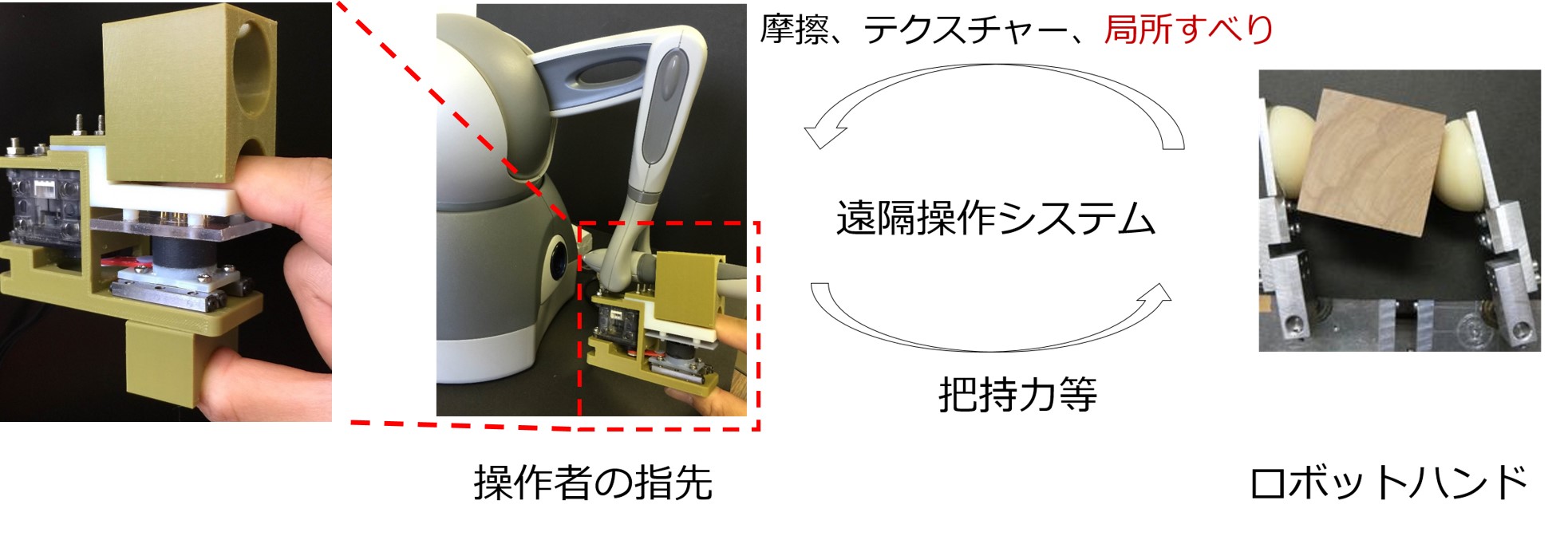
4)Haptic Displays based on Localized Displacement Phenomenon
Human-in-the-loop task involving soft contact has become common in robotic manipulation research, especially in tele-operation and robotic surgery. Soft contact in this task may include a soft-fingered robot hand gripping a rock, or robotic control of forceps to pick up a tissue sample. In these scenarios, operators normally struggle with controlling the gripping force of the remote robotic hand, so that the grasped object is neither dropped nor damaged. Information about slippage, especially incipient slippage (or pre-slide), occurring at the contact surface is not properly sensed by the operator through cutaneous tactile feedback. This study aimed to generate pre-slide sensation on human fingertip for enhancement of slip perception of soft objects. We hypothesized that use of a method that can reproduce localized slippage can enhance human perception of slippage based on our previous study of soft-based contact. We created a grounded slip haptic display device, which can efficiently assess partial slippage on a human fingertip efficiently using a bundle of pins under only one actuation. This paper focuses on the creation of the device, including its theoretical underpinnings and design process, as well as assessing its efficiency in enhancing skin stretching through static and dynamic simulations. The device can be utilized to assess the slide process of a human fingertip, perceiving how and when slippage occurs on the contact surface; and can act as a platform for studies