研究内容
最新研究の紹介ビデオ
ソフトセンサ
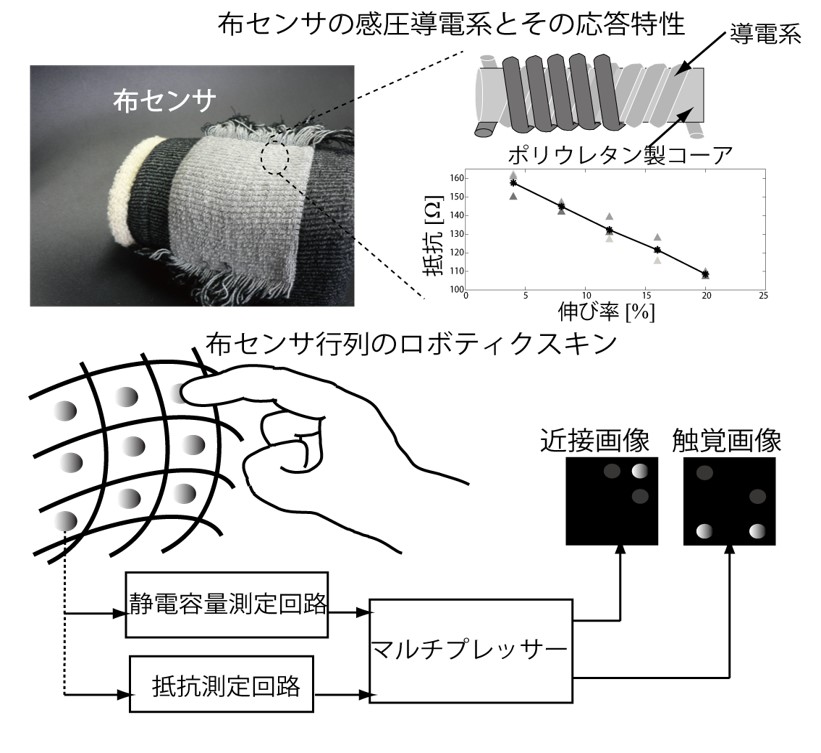
◆布地センサ
感圧導電糸を用いて多機能(マルチモダリティ)、高密度(マルチセンシング)で、かつ柔軟性のあるロボティックスキンを開発し、ヒトに優しく接触できるロボットアームの制御を実現することを目的とする。感圧導電糸を編み込んだ布センサはマルチモダリティを有しており、一つのデバイスで、静電容量の検出による近接のセンシングと、圧力による抵抗値変化に基づく触覚センシングとの両方が可能となる。従って、この感圧導電糸に基づく人工肌をロボットアームに装着することにより、全腕によるセンシング能力を与えることができ、ロボットの近くにいるヒトや外部環境と接触状態を高度に感知し、衝突する様ことなく安全に接触することが可能になる。
◆形態変形によるアクティブな触覚検知装置
柔軟な触覚装置は、柔軟基質とその中にあるセンサ(歪ゲージ等)から構成され、センサの応答は柔軟物の機械特性に大きく依存する。そして、柔軟基質に統合されたアクチュエータ(空気圧等で柔軟物を変形させ、同一のセンサのみでも 異なるセンシング能力が得られる アクティブな触覚装置を開発する。

ロボットハンド
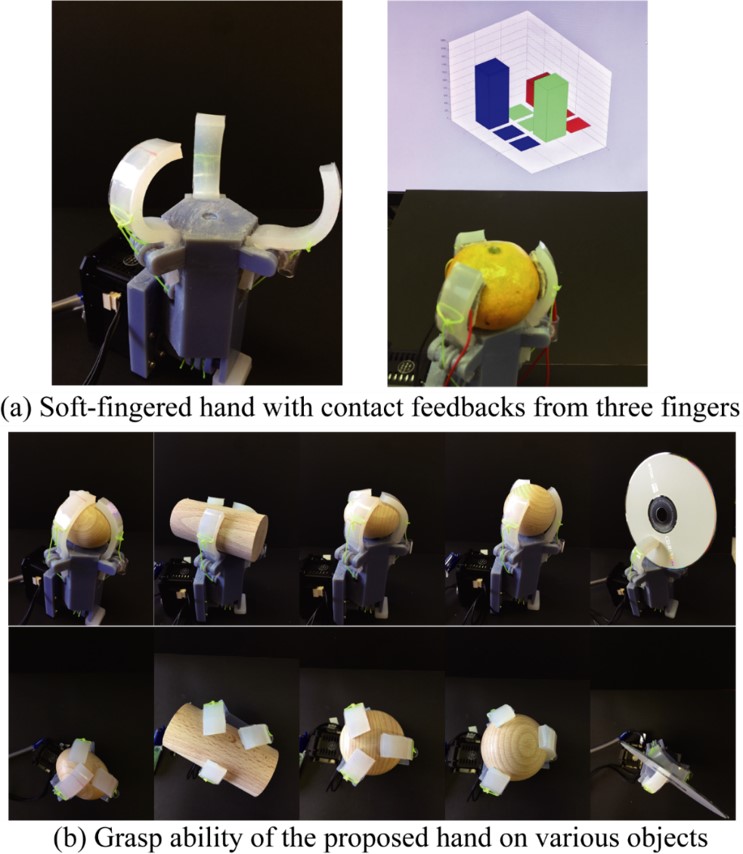
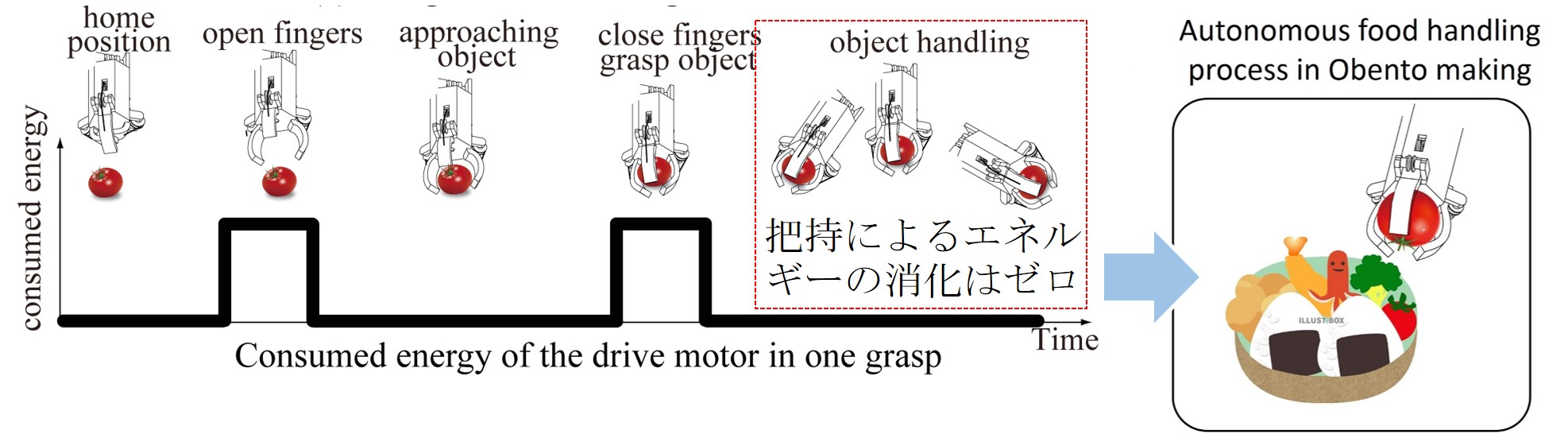
食品など柔らかい物品の把持に好適なロボットハンド:弾性のある複層構成に基づいて残留応力のある柔軟な指の設計を提案した。そして、各々の指が紐で開閉する動作を実現されることより残留応力による対象物の把持力が自然に生じ、把持におけるエネルギーの消化はゼロになる。また、各指に布センサを備え、対象物との接触状態が効率的に検知できる。今後、お弁当におやつ等を自動に備えるソフトハンドのシステムを目指す
提示装置
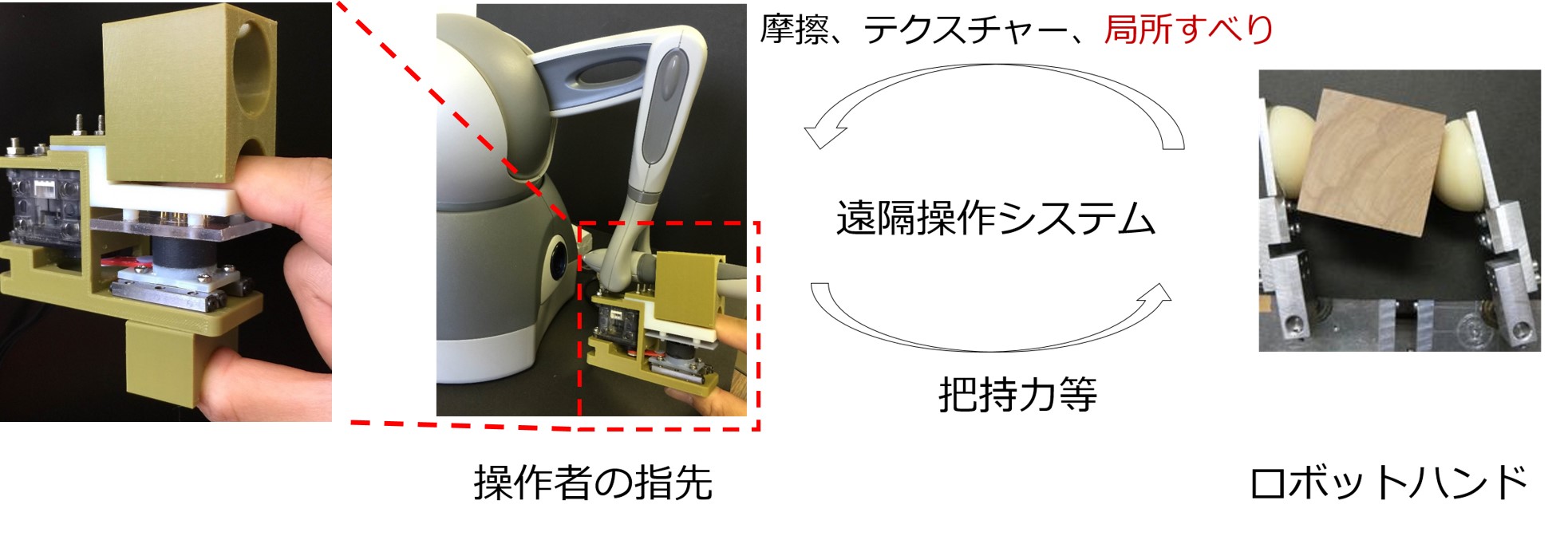
遠隔操作システムにロボットハンドが把持する対象物が滑り落ちそうな時に、この滑りの初期状態を操作者に伝える触覚提示装置。
接触面に、滑り前段階において、ミクロな滑りが外側から内側に起こった直後明白な滑りが生じるという局所すべり現象を解明した。その現象を人の指先に再現できると、人の初期滑り感覚を強めることができるアイデアから、たった一つの アクチュエータでも局所すべりを起こす触覚提示装置を提案した。そして、小型の触覚提示装置を遠隔操作システムと一体化させ、遠隔にロボットにおける安定な物体操作等の動作を目指す。