
近年、AI(人工知能)やIoT(モノのインターネット)などの技術進歩により、ロボットが私たちにとってより身近な存在となっています。人間情報学研究領域のHo Anh Van准教授は、多様なセンシング技術や柔軟なシリコン素材、さらには動物や植物の優れた構造や機能を活用した、「工夫ある」ロボットの研究開発を進め、注目を集めています。
人に寄り添う次世代ロボットの開発/人間情報学研究領域 Ho Anh Van准教授
世界初!ロボットの全腕に触覚・近接覚を持たせた、ロボットアームを開発
介護や看護、製造業など、幅広い業界での活用が期待されるロボット工学の分野では、人との協調、協働が可能なロボットの研究が進められています。その分野で活躍するHo Anh Van准教授は、世界初の全腕に触覚・近接覚を持たせたロボットアームの開発に成功しました。
「我々が開発したロボットアームは、既存の製品と比較すると皮膚の触覚が格段に広範囲になっています。ロボットの全身・全腕に触覚を備えることは、従来の方法では非常に難しいことでしたが、今回効率的に開発する方法を実現することができました。」

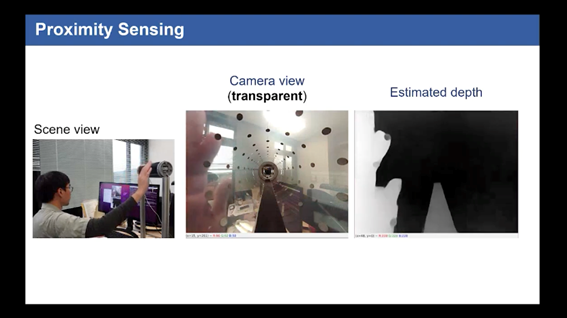
従来、触覚・近接覚を持たせたロボットアームには、多くのセンシング装置の搭載が必要と考えられてきましたが、Ho研究室ではカメラと位置情報のマーカーのみで装置を設計することに成功しました。アームの内側にカメラを設置することで周囲の様子を把握でき、さらに皮膚内部に記されたマーカーの変形や動きをカメラが追従することで、接触や圧力を広範囲で検知できる仕組みです。この技術によって、ロボットは周囲の人やモノとの距離を把握することでき、危険と判断すればロボット自らが安全行動に移るという、人とロボットとのより安全な協調作業が可能になります。
Ho准教授が開発した触覚・近接覚の技術は、果物のような繊細で柔らかいものをつかむ・つまむといったロボットハンドの開発、皮膚に触れられた感覚を遠隔で相手に伝えるといった触覚通信技術の開発、触れられた力の強弱から相手の多様な感情や意図を推測することで、触覚による人とのコミュニケーションを可能にする人工知能を搭載したソフトロボットの開発などを通じて、ロボットと人間が共存する未来に向けた実用化が期待されています。
「例えば柔らかい素材で作られたソフトロボットは柔軟性があり、ロボットの皮膚温度を変化させることもできますので、まさに人間のような皮膚を実現することができるのではないかと考えています。それにより、金属などの硬くて冷たい素材で作られたものよりも、触れ合った人に安心感をもたらすことができます。」
柔らかい素材を生かし、ドローン飛行の安全性を高める
Ho准教授は、柔軟性のある素材をソフトロボッティックス以外の分野でも活かしたいと、ドローン飛行の安全性の向上にも取り組んでいます。
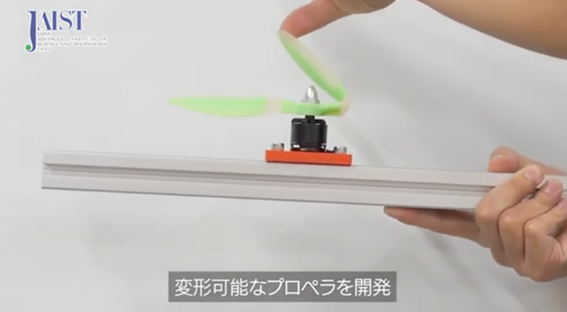
「ドローンのプロペラは高速で回転するため、衝突すると人や物に損傷を与える可能性が高いといえます。そこで、柔らかく変形可能なプロペラを開発しました。このプロペラは、物に衝突すると自ら変形するため、衝突の損傷リスクをかなり低減することができます。さらに衝突後、プロペラ自らが速やかに元の状態へと復帰することができるため、飛行を続けることも可能です。」
人との相性が良く、触感から安心感を与えることができる柔らかな素材は、そのほかにも医療で使われる内視鏡器具など、他にわたる分野で開発が活発に進められています。
「ソフトロボッティックスは、まだまだ新しい分野でありますので、実用化に向けた取り組みを進めることで、まずは社会に広く受け入れられるようにしたいと考えています。ソフトロボットの最終的な使命は「人間に優しく接することができる」こと。近い将来、社会のさまざまな場面で人の良きパートナーになれるといいですね。」
動植物の構造や機能から発想を得た、バイオインスパイアードの研究で革新を起こす
さらに、Ho研究室では、動物や植物の優れた構造や機能に着目し、その動きのメカニズムをロボットに応用する、バイオインスパイアードによるロボット開発も進めています。そのひとつである、バラの開花の動きにヒントを得て作られたロボットハンドは、反復動作のみで果物のような繊細な物の運搬を可能にしています。

「動植物は、生態環境の変化に適応するため、長い時間をかけて体形や身体構造、移動方法などを進化させてきました。その優れた機構・機能に着想を得ることで、より安全で適応性の高い、かつスマートなロボットを実現することができるのではないかと考えています。」
Ho准教授のチームがまず取り組んだのは、ウナギの水中運動の仕組みです。ウナギはどのように水中で推進力を得ているのかをコンピュータ上で解析し、その動きをソフトロボットで再現することに成功しました。そのほかカタツムリが表面に吸着しながら移動する際に分泌する粘液に着目し、壁や天井で動ける装置の開発を目指すなど、ロボットを活用した革新的な移動・輸送技術の確立を目指しています。
※本件に関するお問い合わせは以下までお寄せください。
北陸先端科学技術大学院大学 未来創造イノベーション推進本部
Tel: 0761-51-1070
Email: ricenter@ml.jaist.ac.jp