Robotics Laboratory
Object Center of Mass Estimation and Two Edge Planar Pushing
Introduction
Pushing is one of the fundamental nonprehensile manipulation skills to impart to an object changes in position and orientation. To exploit this skill to manipulate novel objects, explicit knowledge of their physical properties should be given a priori. In this project, we estimate the center of mass (CoM) of an object by narrowing down its probable location with a deep learning model and Mason's voting theorem. In addition, we propose the Zero Moment Two Edge Pushing (ZMTEP) method to translate a novel object without rotation to a goal pose. The proposed method enables a pusher to select the most suitable two-edge-contact configuration for a given object using the estimated CoM and the geometrical shape of the object. Notably, neither the friction between the object and its support plane nor the friction between the object and the pusher are assumed to be known. We evaluate the proposed CoM estimation and ZMTEP methods through a series of experiments in both simulation and real robotic pusher settings. The result shows that the CoM estimation method has good mean squared error properties and small standard deviation, and the ZMTEP method can robustly translate the object toward the desired position.
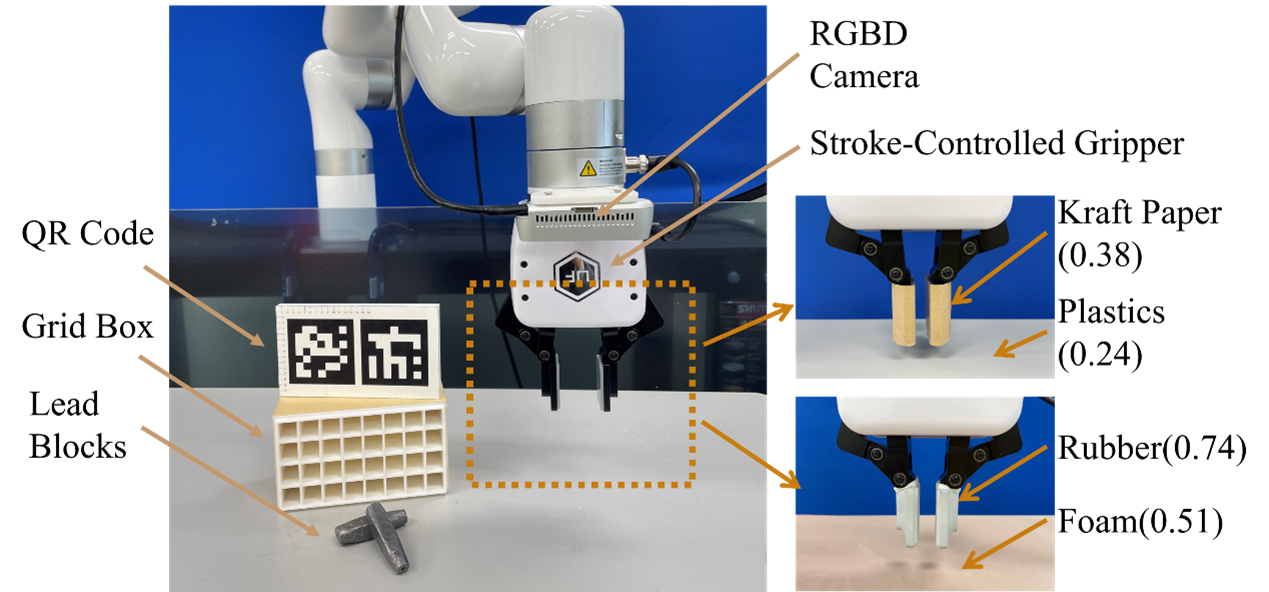
The left figure shows the CoM estimation and object translation experiment setting: A five-DoF manipulator equipped with a variable opening stroke parallel-jaw gripper pushes a CoM changeable grid box on a flat surface. The stroke ranges from 0cm to 8.6cm and the size of the grid box is 14cm×8cm. We put two lead blocks into different cells to change the CoM. The box weighs around 200 grams and each lead box has around 80 grams.
The right figure shows two frictional settings with the measured frictional coefficients in parentheses under the assumption of Coulomb's friction law. We wrap the gripper with two different materials: a low friction kraft paper and a high friction rubber. As for the plane surface, we test the table-top surface itself and the foam surface as shown in the figure.
Video Clip
Object Center of Mass Estimation Experiment
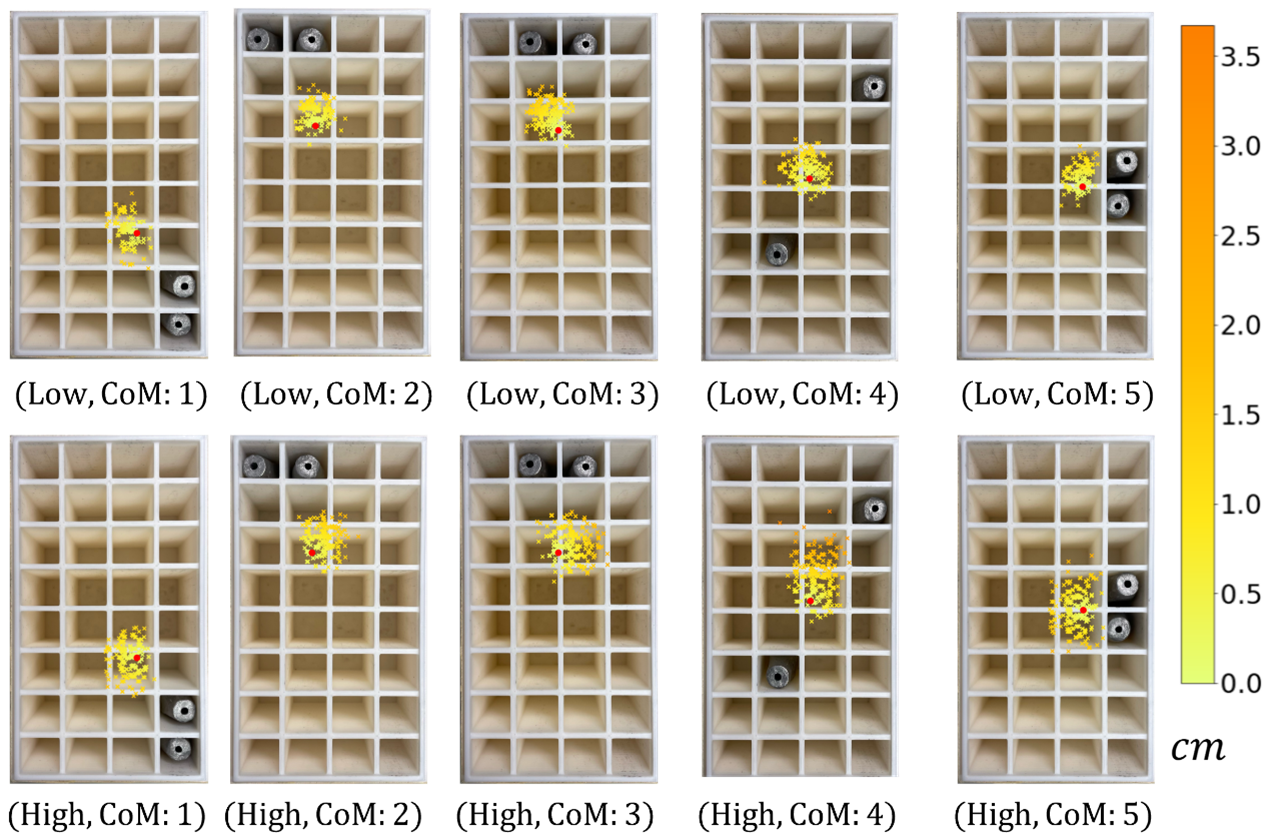
CoM estimation results in low and high friction settings. Red dot represents the ground truth CoM. Other dots are estimated CoMs. The brighter the color, the closer to the ground truth.
Object Translation Experiment via Two Edge Contact Configuration
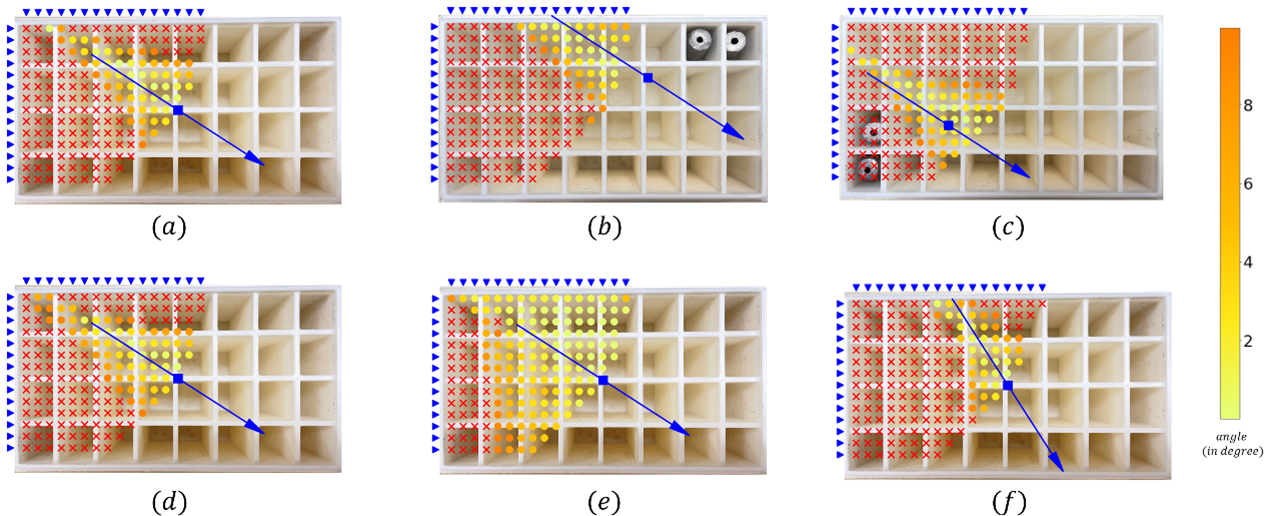
Real robot pushing of a box with a variable stroke gripper along the blue arrow direction. Blue triangle markers are sampled contact points. Each pair of contact points form an intersection point denoted by red cross markers and orange dot markers. Red crosses are failed, orange dot marks are success. Blue squares are the CoMs of the grid box. The CoMs in (b) and (c) are biased by two lead blocks near the corner. (d) uses a high friction foam surface and (e) uses a rubber wrapped gripper.
Reference List(as of September 2022)
- Z. Gao, A. Elibol, and N. Y. Chong, “Planar pushing of unknown objects using a large-scale simulation dataset and few-shot learning,” in IEEE International Conference on Automation Science and Engineering,895 pp. 341–347, 2021.