Robotics Laboratory
Incremental learning for real time robot systems
Incremental learning for real time robot systems
Introduction
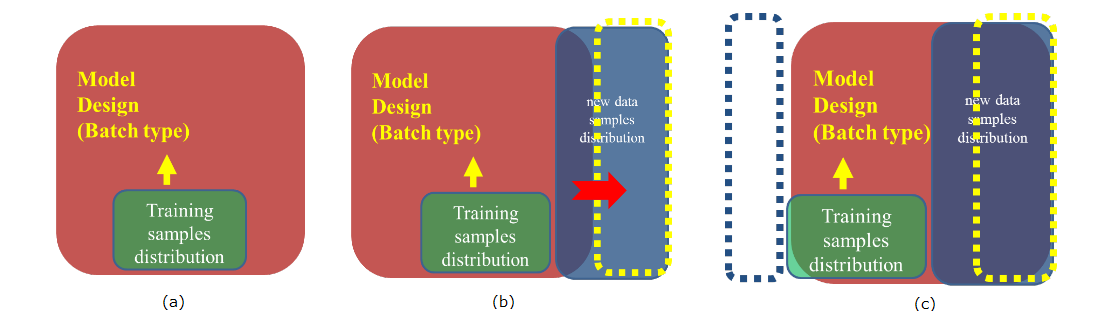
Figure. Stability and plasticity dilemma. (a) Current model is designed by using given samples with batch type learning method. (b) Current model may not classify the new data samples as shown in yellow box. (c) When we update our model to adapt to the new data samples, updated model may not memorize the old data samples as shown in blue box. While the automated recognition of objects in natural scenes has already been studied for decades, this still remains a challenging problem in machine vision. In most machine vision systems, training and testing are usually considered as separate processes. Also, since limited sample data are normally used for training, the trained system cannot generalize well in unfamiliar circumstances. This is in part because the model parameters obtained from the limited data do not provide enough flexibility. Yet, additional training with new sample data can induce a loss of previously acquired knowledge. This phenomenon is known as the stability and plasticity dilemma, and remains one of most difficult issues for both object recognition problems and machine learning. While humans can easily recognize and categorize complex objects in a cluttered background with minimal prior knowledge, machine vision systems require prior knowledge in the form of a large set of sample images obtained from various conditions for proper training. However, acquiring adequate prior knowledge is a significant challenge. Moreover, in some cases, obtaining sufficient training samples representing various conditions can be impossible. Hence, certain state-of-the-art object recognition systems have been optimized for a specific class of object, such as human faces or vehicles. Yet, despite the efforts of many active research groups in this area, non-specific object recognition still poses a substantial challenge for machine vision. Our research is to incrementally and/or adaptively learn visual objects to increase plasticity ability and reduce forgetting loss by mimicking the human brain for cognitive developmental robot.