Robotics Laboratory
Optical Underwater Mapping
Underwater Robotics Research for Optical Mapping
Introduction
Underwater Imaging is a challenging research field, concerning both hardware and software aspects. On the one hand, the Autonomous Underwater Vehicles (AUVs) should be able to perform surveillance trajectories close to the sea floor, avoiding any kind of physical and unpredicted obstacle, allowing to acquire image sequences with a camera pointing to the seabed. On the other hand, the underwater medium presents some special phenomena, like light attenuation and scattering which difficult the image acquisition task. Finally, the acquired images can be used to recover the topology of the trajectory followed bu the AUV and generate a large dimensions unified image called photo-mosaic.
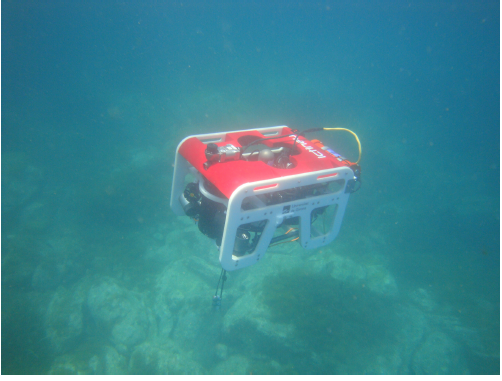
ICTINEU AUV (developed by the ViCOROB group from the University of Girona) performing a seabed exploration in autonomous mode. The robot is able to describe a programmed trajectory and simultaneously acquire high rate images from the sea floor, which will be used to build a photo-mosaic.
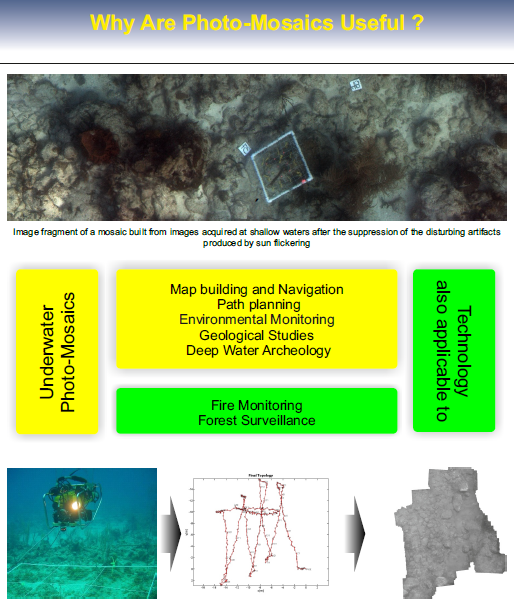
The images acquired by the AUV and the navigation data obtained by the a set of sensors are combined in order to estimate the topology of the followed trajectory. This information is used later to build a photo-mosaic covering the whole area explored by the vehicle.