Robotics Laboratory
Swarm Robot Team
Research on motion control for swarm robots with local interaction
Introduction
Deploying a large number of resource-constrained mobile robots performing a common group task may offer many advantages in efficiency, scalability, costs per system, and fault-tolerance. Therefore, robot swarms are expected to perform missions in a wide variety of applications such as environment and habitat monitoring, exploration, odor localization, medical service, search-and-rescue, and transportation. In order to perform the above-mentioned tasks successfully, one of the most important concerns is how to control the motions of the robots. From the standpoint of the decentralized coordination, the motions of individual robots need to be controlled to support coordinated collective behavior.
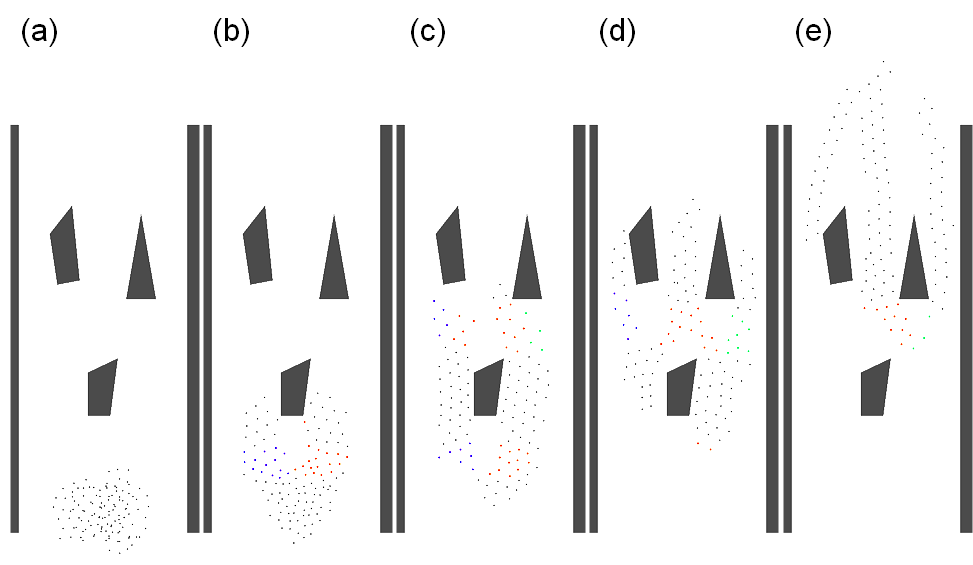
Our research is how to control the robot using a simple behavior rules in the unknown environment. Through the local behavior rules, a swarm of robots is able to configure themselves into an area at a uniform interval. In two-dimensional, three neighboring robots form an equilateral triangle lattice.[1].And, in three-dimensional space, four neighboring robots form an equilateral tetrahedron lattice[2]. The proposed algorithm allows robot swarms to establish a regular triangle or tetrahedral network in a scalable manner according to a given spatial density and to navigate toward achieving a mission while adapting to an environment [3][4].

Reference List(as of November 2011)
- G. Lee and N. Y. Chong, “A geometric approach to deploying robot swarms”, Annals of Mathematics and Artificial Intelligence, vol.52, no.2-4, pp.257-280, 2009
- G. Lee, Y. Nishimura, K. Tatara, and N. Y. Chong, “Three dimensional deployment of robot swarms”, Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.5073-5078, 2010
- G. Lee and N. Y. Chong, “Adaptive flocking of robot swarms: algorithms and properties”, IEICE Transactions on Communications, vol.E91-B, no.9, pp.2848-2855, 2008
- Y. Nishimura, G. Lee and N. Y. Chong, S. H. Ji, and Y.-J. Cho, “Adaptive navigation control for swarms of autonomous mobile robots” in Advances in Robot Navigation, I-Tech Education and Publishing, ISBN: 978-953-307-186-2, pp.101-118, 2011
- G. Lee and N. Y. Chong, “Low-cost dual rotating infrared sensor for mobile robot swarm applications”, IEEE Transactions on Industrial Informatics, vol.7, no.2, pp.277-286, 2011