Robotics Laboratory
RFID Team
Self-Organizing Ad Hoc Robotics Sensor Network Based on Locally Communicative Interaction.
Introduction
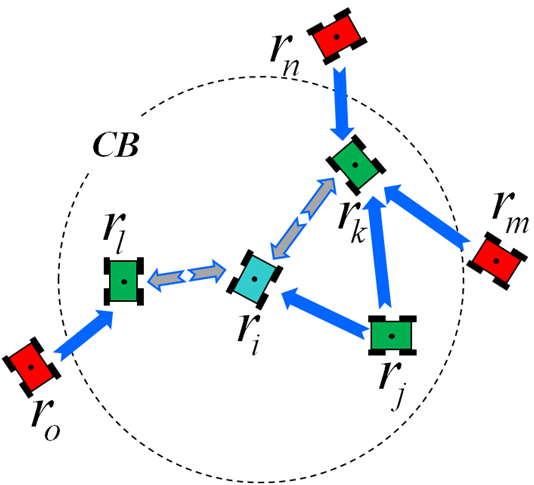
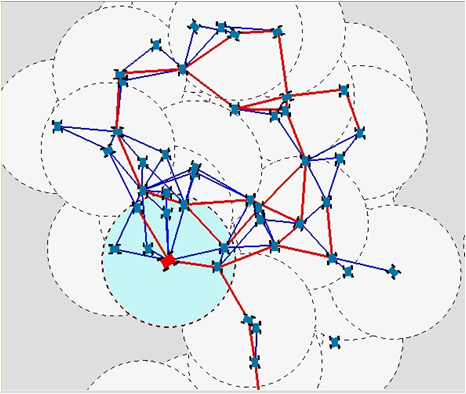
We address a self-organizing network problem for autonomous robotic sensor swarms towards various ad hoc sensor network applications. For this purpose, a decentralized solution approach is proposed to enable individual robots to build and to maintain their network through locally communicative interactions with adjacent robots. Specifically, the communicative interaction allows robots to select specific neighbors with higher connectivity, and to adapt to network topological changes by robot movements.