Robotics Laboratory
An Integrated 2D and 3D Location Measurement System Using Spiral Motion Positioner Team
An Integrated 2D and 3D Location Measurement System Using Spiral Motion Positioner
Introduction
Advances in technology and manufacturing have created various types of location measurement systems that can be used for robotics, security and surveillance systems, and so on. Most existing sensors have been designed to measure the distance in the same flat plane. However, current robot applications are expanding rapidly from the flat surface to a wide range of terrestrial, airborne, and undersea environments. Recently, much attention has been paid to developing different types of mobile robots such as flying robot, swimming robot, or jumping robot that can be operate in large three dimensional environments. Therefore, the objective of this research is to develop a cost effective and energy efficient three dimensional location measurement system that can be incorporated into a wide range of mobile robot platforms in the areas of distributed robotics and security and surveillance.
There have been considerable efforts to secure wideranging observations for two dimensional applications. A commonly used approach was to have larger numbers of sensors installed around the circumference of a robot. Alternatively, a sensor system capable of rotating around a vertical axis was designed (e.g., Hokuyo scanning laser range finder (LRF)). We have also developed an infrared proximity sensor that provides full 360 degree coverage with variable rotation angle and speed.
Three dimensional location measurement systems have been implemented in different ways such as pan-and-tilt positioner and Laser Radar (LADAR). The pan and tilt mechanism enables sensor beams to sweep up and down and to the left and right at various angles by generating two independent rotation motions with respect to a vertical axis and a horizontal axis, respectively. A wide range of sensors mounted onto the pan and tilt positioner has been applied to surveillance, SLAM, grasping, and robotic eye mechanism. However, the overall system tends to become heavy and bulky. Similarly, three dimensional laser scanners have been recently proposed by combining a tilting motion and Hokuyo LRF. However, several questions remain as to how the difference between latitude and longitude resolutions and substantial blind spots can be resolved. On the other hand, LADAR employs the same operation principle like radars and light from laser beams. Through analysis of the pulsed laser light reflected from objects, LADAR can obtain the positions, velocities, and other geometric features of objects. Due to its capability to observe large spaces with very high precision, LADAR has a large number of applications in geography and atmospheric physics, industrial systems, and robotics. However, LADAR turns out to be a very complicated system, as it needs additional optical components such as mirror, photodetector,and receiver electronics.
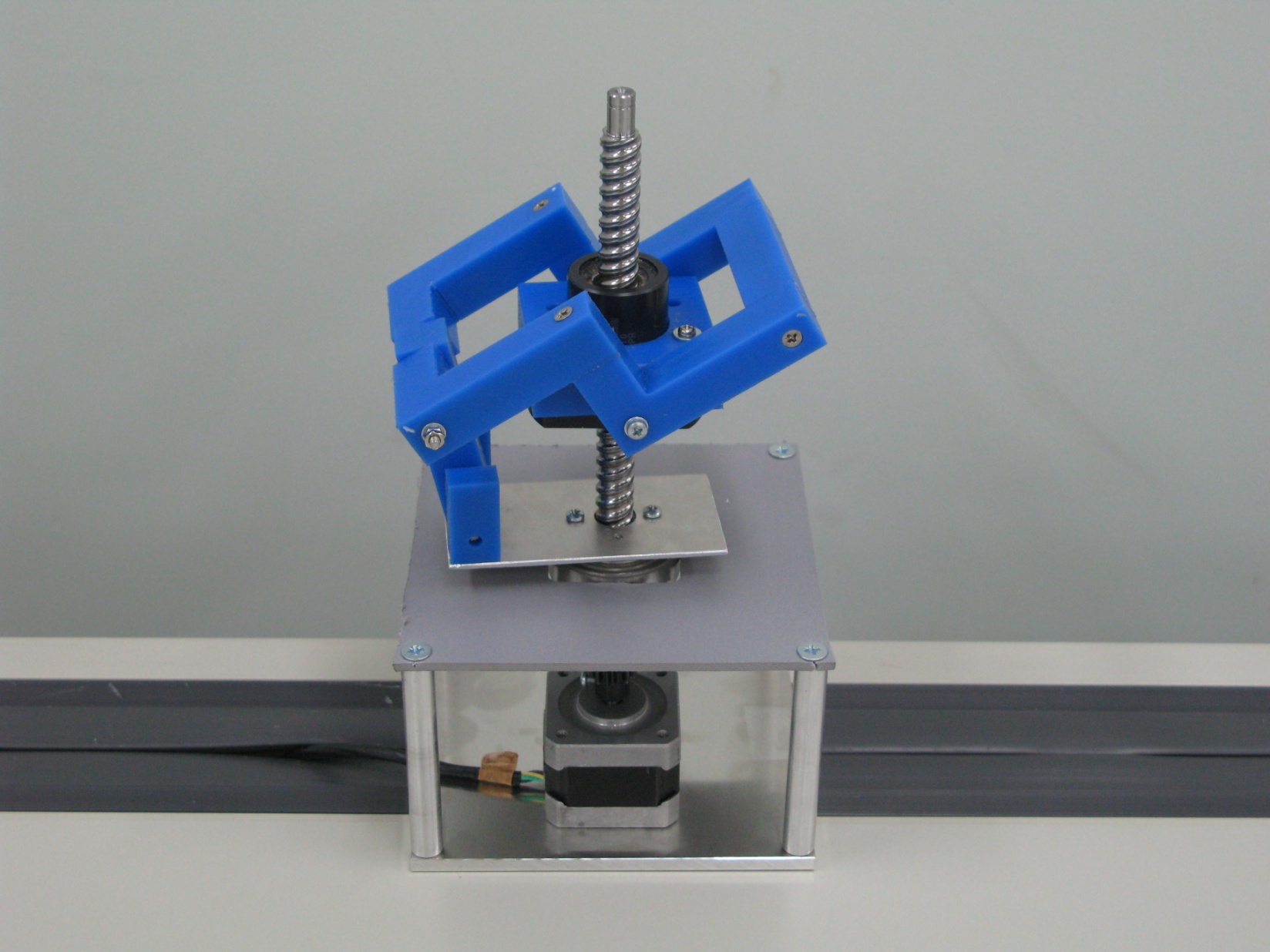
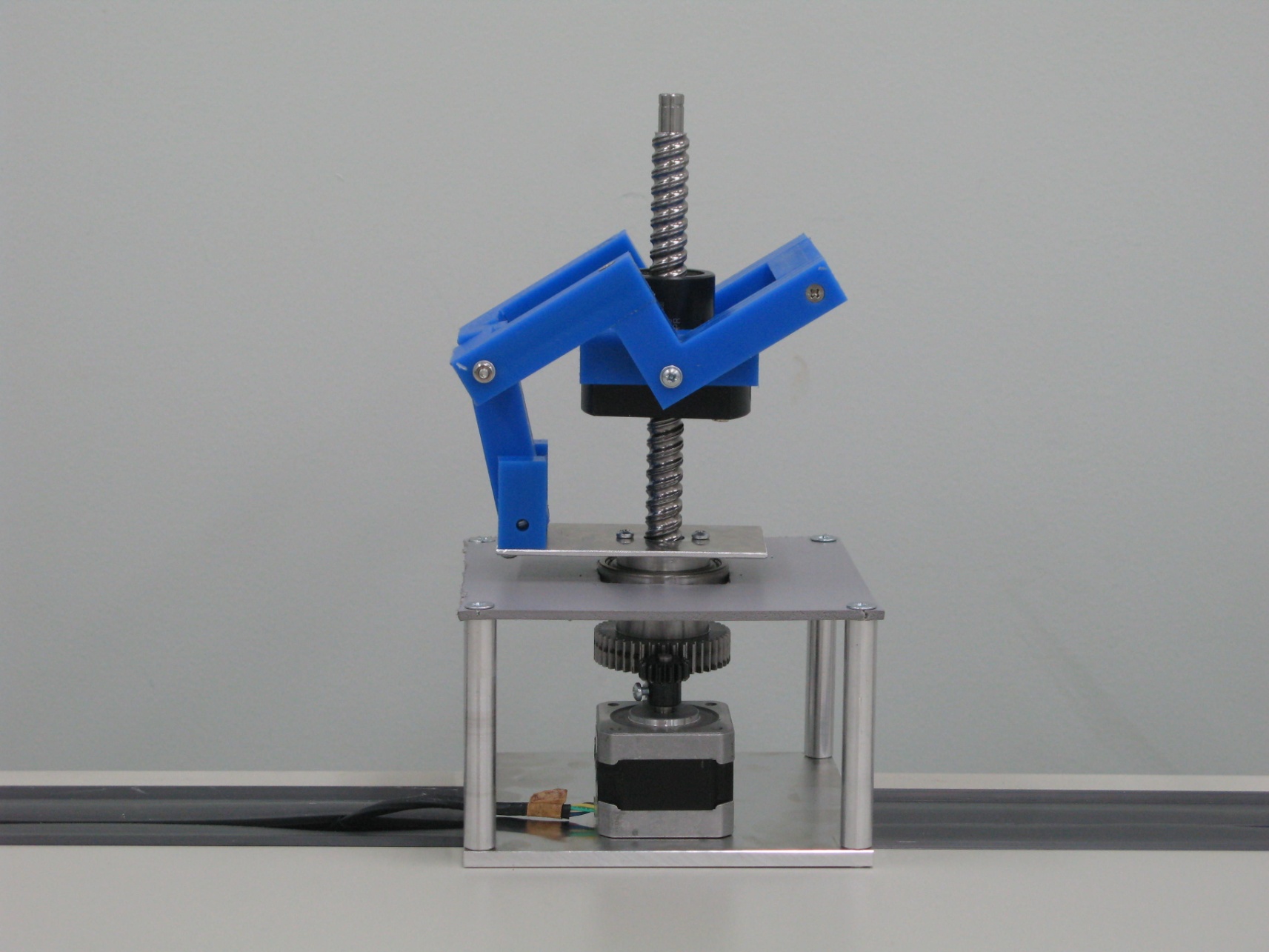
In the most fundamental sense, one simple and easy to implement idea for three dimensional sensing is to mount existing sensors developed for two dimensional applications onto a three dimensional positioner. Along the lines of this idea, this paper presents a novel three dimensional positioned enabling two dimensional range sensors to measure the distance to objects in all directions without blind spots. The main features of the positioner are summarized as follows:
1) a simple nut-and-bolt and link mechanism;
2) continuous spiral trajectories;
3) a single motor driven system that helps reduce the size, weight, mechanical complexity, and cost.
Moreover, we effectively integrate two dimensional and three dimensional positioning functions in this work.
Reference List(as of November 2011)
- Geunho Lee, Naoto Noguchi, Nobuya Kawasaki, Nak Young Chong. “An Integrated 2D and 3D Location Measurement System Using Spiral Motion Positioner”, IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012