Robotics Laboratory
Unmanned Aerial Vehicle(UAV)
Development of Autonomous Aerial Vehicles UAV
Introduction
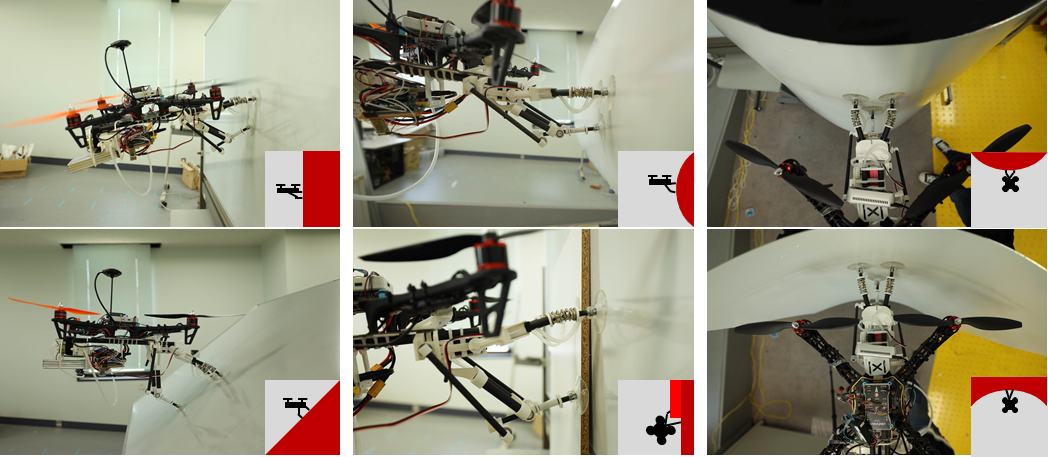
Unmanned Aerial Vehicles (UAVs) have been taking an important place in daily life with several different usage purposes, e.g., mapping, surveillance, inspection, and many others. One of the widely used areas of UAVs is visual inspection since they can gather information from areas beyond human-reach or from environments hostile to humans. Their usage for the inspection purpose is mostly limited to non-contact type sensors such as optical cameras and/or laser sensors. In this project, we propose an autonomous distributed cooperative control framework based on machine learning and a new interaction algorithm. We will develop a new method for accurately estimating surface information and characteristics of an environment through the control of multiple robot probes that dynamically interact with an unknown environment. Also, complete development of a compact robotic mechanism with a robotic arm to allow UAVs to land on any shape of surfaces and to collect data from surfaces using not only non-contact type but also contact-type sensors is aimed at this project. This mechanism is intended to be light-weight, modular, expandable, selfbalanced, attachable to most of the existing UAVs. Such system will make UAVs to be more powerful and useful for different applications such as Search and Rescue (of buried survivors due to natural disasters or accidents at work), mine search and clean, detailed inspection of any type of surfaces such as solar panel, aircraft, and similar others.
Video Clip
Reference List(as of March 2021)
- Abdullah Al Redwan Newaz, Sungmoon Jeong, Nak Young Chong, Online Boundary Estimation in Partially Observable Environments Using a UAV, Journal of Intelligent and Robotic Systems, Vol. 90, Issue 3-4, pp. 505-514, Springer, June 2018
- Abdullah Al Redwan Newaz, Sungmoon Jeong, Hosun Lee, Hyejeong Ryu, Nak Young Chong, UAV-based Multiple Source Localization and Contour Mapping of Radiation Fields, Robotics and Autonomous Systems, Vol. 85, pp. 12-25, Elsevier, August 2016
- 3D Exploration Priority Based Flocking of UAVs,Abdullah Al Redwan Newaz, Geunho Lee, Ferdian Adi Pratama, Nak Young Chong,Proc. IEEE International Conference on Mechatronics and Automation,pp. 1534-1539,2013/08/04
- Exploration Priority Based Heuristic Approach to UAV Path Planning,Abdullah Al Redwan Newaz, Ferdian Adi Pratama, Nak Young Chong,Proc. IEEE Int. Symposium on Robot and Human Interactive Communication,521-526,2013/08/26