人と安全に協働できる"ソフトロボットリンク"を開発 触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
人と安全に協働できる"ソフトロボットリンク"を開発
触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
【ポイント】
- 透明・不透明を切り替えられるソフトスキンと視覚センサーを用い、近接センシングとスキン変形の解析による触覚センシングを備えたマルチモーダルソフトセンシング技術「ProTac」を開発
- 市販ロボットアームにも取り付け可能
- 従来の剛体リンクでは困難とされる、接触の多い環境下での動作制御が可能
- 農業や介護など、人とロボットが協働する作業への応用に期待
- AI駆動型センシングフュージョン技術
| 北陸先端科学技術大学院大学 ナノマテリアル・デバイス研究領域のクアン・ハン・ルウ研究員、ホ・アン・ヴァン教授らの研究チームは、透明・不透明を電圧により切り替えられるソフト素材と視覚センシング技術を融合し、近接・触覚の両モードを切り替えて検知できるマルチモーダルソフトセンシング技術「ProTac」を世界で初めて開発しました。ProTacを用いたソフトロボットリンクは、周囲の物体を検知する近接センシングとマーカー画像の変化から触覚情報を読み取る触覚センシングを一台で切り替えて行うことができ、人との接触が多い環境で安全に動作制御が可能です。なお、本研究成果は、2025年7月28日にIEEE Transactions on Robotics(T-RO)に掲載されました。 |
【研究概要】
近年、人と同じ空間で安全かつ柔軟に作業できるロボットのニーズが高まっています。これに応えるため、私たちの研究チームは、ソフト機能材料と画像や映像から情報を取得・解析する技術である視覚センシング技術を融合した新しいマルチモーダルソフトセンシング技術「ProTac」(図1)を開発しました。
ProTacは、電圧をかけることで透明・不透明を切り替えられるポリマーディスパースド液晶(PDLC)フィルム注1)と内蔵カメラを組み合わせています。透明時には視界を活用して周囲の物体の近接を検知し、不透明時にはマーカー画像の変化から触覚情報の取得を実現します。また、最新の深層学習ベースの視覚アルゴリズムを用いることで、安定したリアルタイムセンシングが可能です。
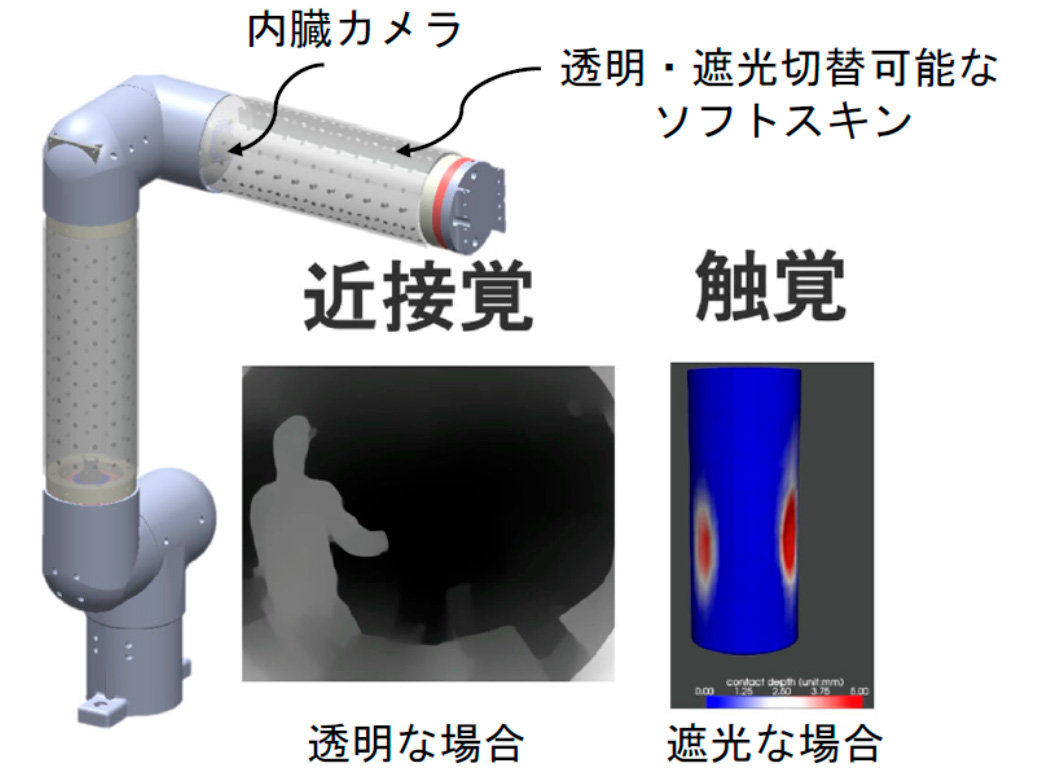
図1:ProTacのイメージ図
この技術を用いたソフトロボットリンクは、市販のロボットアームやカスタム製作されたソフトロボットにも取り付け可能で、障害物検知に基づく速度調整や接触時の反射動作など、多様な制御戦略を実現します。ProTacを備えたソフト多機能センシングアームは、人とロボットが密に連携する場面や、従来の剛体リンクでは困難な動作制御において高い性能を示しました。
今後は、この技術を手足や胴体などロボットの各部位に応用し、高機能なマルチモーダルスキンを備えたヒューマノイドロボットの実現が期待されます。また、農業、家庭サービス、介護分野など、幅広い分野での応用も見込まれます。
【研究資金】
本研究は、日本学術振興会 科学研究費補助金 特別研究員奨励費(24KJ1203)、国立研究開発法人 科学技術振興機構(JST)さきがけ(JPMJPR2038)による財政的支援を受けて実施されました。
【論文情報】
| 掲載誌 | IEEE Transactions on Robotics |
| 論文タイトル | Vision-based Proximity and Tactile Sensing for Robot Arms: Design, Perception, and Control |
| 著者 | Quan Khanh Luu, Dinh Quang Nguyen, Nhan Huu Nguyen, Nam Phuong Dam, Van Anh Ho |
| 掲載日 | 2025年7月28日 |
| DOI | 10.1109/TRO.2025.3593087 |
【用語説明】
電圧により透明・不透明を切り替えられる液晶材料。柔軟であり、ディスプレイやスマートウィンドウなどの光の透過を制御する用途に使用される。
令和7年8月22日
