
研究活動の検索
研究概要(研究室ガイド)やプレスリリース・受賞・イベント情報など、マテリアルサイエンスの研究室により公開された情報の中から、興味のある情報をタグや検索機能を使って探すことができます。無人移動ロボットによる知的環境センシング技術の開拓

無人移動ロボットによる知的環境センシング技術の開拓
移動ロボティクス研究室 Laboratory on Mobile Robotics
准教授:池 勇勳(JI Yonghoon)
E-mail:
[研究分野]
ロボティクス、センサ情報処理
[キーワード]
移動ロボット、ロボットビジョン、環境センシング、 SLAM(simultaneous localization and mapping)
研究を始めるのに必要な知識・能力
線形代数学、確率論等の数学の基礎力と、ロボット工学、計測工学、機械学習の全般的な知識を持っていた方が望ましく、好奇心を持って研究への意欲のある学生であれば歓迎します。自分のアイデアをロボットシステムに実装するために、簡単なハードウェアの制作とプログラミング言語(特にC++又はPython)に慣れている場合は有利です。
この研究で身につく能力
ロボティクスは、機械・電子・情報・制御・計測等の様々な分野の要素技術が融合される分野であり、システムインテグレーション技術が非常に重要です。具体的な研究テーマによって差はありますが、エンジニアとしての幅広い工学的知識を習得可能です。また、当研究室では実際の現場に適用可能な社会実装に焦点を当てた研究を積極的に行っているため、様々な社会ニーズと先端技術とのマッチング能力と、社会に貢献可能な新しい技術を創造する基礎能力を学ぶことができます。
【就職先企業・職種】 製造業、IT系企業、研究職等
研究内容
当研究室では、無人移動ロボットと各種センサ情報処理技術を通じて、実社会における様々な問題解決に貢献可能な研究に取り組んでいます。特に、人間の代わりに災害環境や豪雪環境など過酷な環境内に分布する様々な物理的な情報を計測することで、高度な知的環境認識及び運動制御技術を実現しています。
■被災地探査ロボットシステム
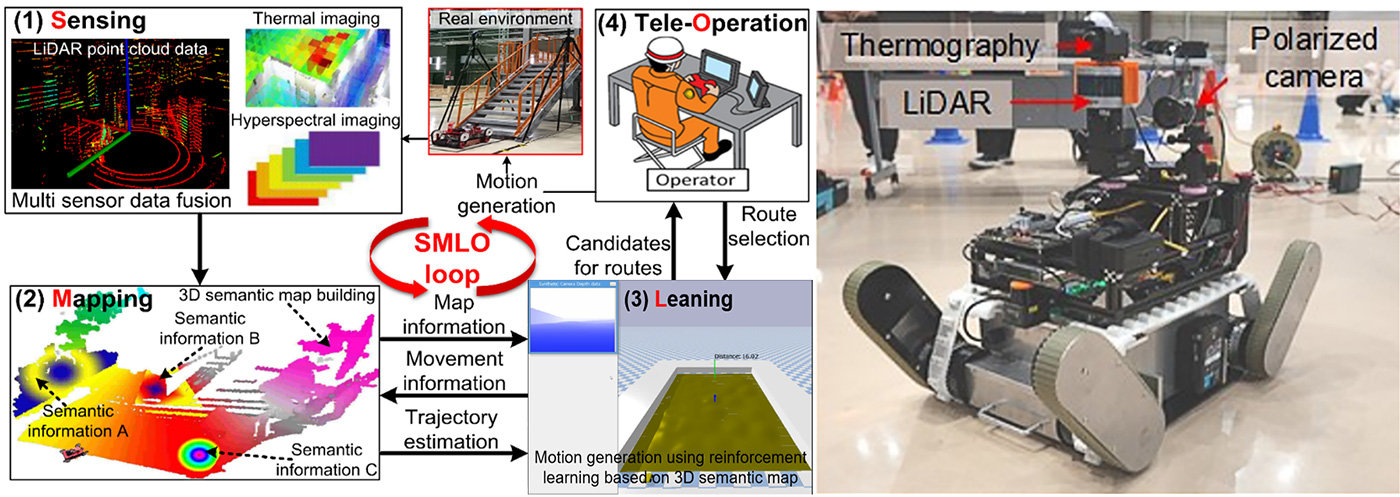 当研究室では、自然災害をはじめ原子力災害等の災害現場において、被害情報収集活動や原子炉建屋内の環境モニタリングを実施するための、半自律移動ロボットによるセマンティックサーベイマップ生成システムを開発しています。具体的には、ロボットに搭載されたサーモカメラやハイパースペクトルカメラ、LiDARなどの複数種類のセンサ情報を取得・融合し、環境の物理的な特徴量を含むマップを生成する技術を開発しています。
当研究室では、自然災害をはじめ原子力災害等の災害現場において、被害情報収集活動や原子炉建屋内の環境モニタリングを実施するための、半自律移動ロボットによるセマンティックサーベイマップ生成システムを開発しています。具体的には、ロボットに搭載されたサーモカメラやハイパースペクトルカメラ、LiDARなどの複数種類のセンサ情報を取得・融合し、環境の物理的な特徴量を含むマップを生成する技術を開発しています。
■自律除雪ロボットシステム
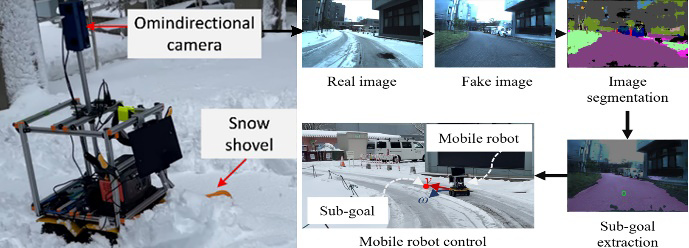 当研究室では、過酷な豪雪による冬期間の積雪環境において、除雪車の自動運転のための基盤技術を開発しており、自律除雪ロボットシステムに搭載したカメラによる周囲環境の知覚能力の向上を図るため、近年驚くほどの技術革新が見られる画像・動画生成AI技術に着目しています。夏季の道路環境と冬季の積雪道路環境との関係性を画像・動画情報により事前に学習しておくことで、冬季にも対応する夏季の偽画像を高精度で生成可能となり、雪に覆われた除雪対象の舗道領域を正確に検出することが可能です。
当研究室では、過酷な豪雪による冬期間の積雪環境において、除雪車の自動運転のための基盤技術を開発しており、自律除雪ロボットシステムに搭載したカメラによる周囲環境の知覚能力の向上を図るため、近年驚くほどの技術革新が見られる画像・動画生成AI技術に着目しています。夏季の道路環境と冬季の積雪道路環境との関係性を画像・動画情報により事前に学習しておくことで、冬季にも対応する夏季の偽画像を高精度で生成可能となり、雪に覆われた除雪対象の舗道領域を正確に検出することが可能です。
また、正確な積雪分布状態の予測による除雪ロボットの高度な経路計画や運動最適化性能を向上させるための研究を行っています。
■特殊環境における自律移動ロボットのナビゲーション
様々なサービスロボットの開発のために不可欠な要素である自律移動ロボットのナビゲーション技術は、ここ数十年間活発に研究されてきた分野であり、最近では既に多くの技術が実用化されつつあります。当研究室では、他にも様々な次世代センサからの計測情報を処理し、多様な特殊環境における自律移動ロボットのナビゲーションの性能を向上させるための研究を行っています。
主な研究業績
- Y. Wang, Y. Ji, H. Woo, Y. Tamura, H. Tsuchiya, A. Yamashita, and H. Asama, "Acoustic Camera-based Pose Graph SLAM for Dense 3-D Mapping in Underwater Environments," IEEE Journal of Oceanic Engineering, 46(3), PP. 829-847, 2021.
- Y. Ji, Y. Tanaka, Y. Tamura, M. Kimura, A. Umemura, Y. Kaneshima, H. Murakami, A. Yamashita, and H. Asama, “Adaptive Motion Planning Based on Vehicle Characteristics and Regulations for Off-Road UGVs,” IEEE Transection on Industrial Informatics, 15(1), pp. 599-611, 2019.
- Y. Ji, A. Yamashita, and H. Asama, “Automatic Calibration of Camera Sensor Network Based on 3D Texture Map Information,” Robotics and Autonomous Systems, 87(1), pp. 313-328, 2017.
使用装置
車輪型およびクローラ型の移動ロボット
LiDAR、測域センサ、光学カメラ、サーモグラフィ、音響カメラ等の環境計測センサ
研究室の指導方針
当研究室では、ロボティクスという学問分野を通じて、多方面に社会に貢献できる人材を育成することを目指しています。そのためには、社会ニーズを把握した上で関連する技術動向を反映させる指導が重要であると考えており、学生には実際の現場に適用可能な社会実装を目標とした研究テーマを与えています。次に、研究成果を世の中に発信するため、すべての学生に対して国内・国際学会発表および学術論文の作成を積極的に推奨しています。最後に、研究室内でのミーティングはもちろん他大学および企業との連携を通じて、複数人のグループでの働き方、コミュニケーション能力、プレゼンテーション能力等も鍛えることを目指しています。
[研究室HP] URL:http://robotics.jaist.ac.jp/
IIP(アイ・アイ・ピー)金沢示野校の生徒の皆さんが来学
7月30日(水)、IIP(金沢示野校)のロボット教室およびこどもプログラミング教室に通う生徒の皆さんと保護者の方々が、施設見学のため本学を訪れました。
当日はキャンパス内のさまざまな施設を巡り、研究や学びの現場を間近にご覧いただきました。なかでも、ロボット工学に関心のある生徒に実際の研究現場を見学させたいとのご要望を受け実施した、人間情報学研究領域の池勇勳准教授の研究室訪問では、池准教授や学生による無人移動ロボットの実演などが行われ、実際にロボットが目の前で動く様子を見ながら、研究の説明に熱心に耳を傾ける姿が印象的でした。
また、情報社会基盤研究センターに設置されている大規模並列計算機「KAGAYAKI」や貴重図書室に所蔵されている『解体新書』(杉田玄白著)、パズル展示施設「JAISTギャラリー」も見学しました。ギャラリーに併設されたプレイルームでは、生徒たちが展示されているパズルに実際に触れ、夢中になって楽しむ様子も見られました。
今回の訪問が、生徒の皆さんにとって今後の進路選択や学びへの関心を深めるきっかけとなるとともに、保護者の方々にとっても、本学の教育・研究活動への理解を深めていただく機会となれば幸いです。





令和7年8月4日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/08/04-3.html福井県立坂井高校の学生さんが来学

12月12日(木)、福井県立坂井高校の生徒30名の皆さんが施設見学のため来学しました。
同校は「マイスター・ハイスクール普及促進事業」の拠点校に指定されており、その一環として大学の最先端技術を学ぶことを目的として行われました。
人間情報学研究領域の池 勇勳准教授の研究室を訪問し、池准教授と学生が無人移動ロボットの実演を行いました。また、情報社会基盤研究センターの大規模並列計算機「KAGAYAKI」や貴重図書室の『解体新書』(杉田玄白著)、パズル展示施設JAISTギャラリーを見学しました。
池研究室のロボット実演では、多くの生徒さんから「おおっ~」という驚きの声も聞こえてきました。皆さんとても熱心に、楽しそうに見学してくださり、ありがとうございました。
池研究室にて無人移動ロボットの実演

大規模並列計算機KAGAYAKIの見学

貴重図書室の見学

JAISTギャラリーの見学
令和6年12月25日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2024/12/25-1.html金沢大学・北陸先端科学技術大学院大学 第3回共同シンポジウムを開催

令和6年7月29日(月)、本学小ホールにおいて、金沢大学・北陸先端科学技術大学院大学 第3回共同シンポジウムを開催しました。
金沢大学と本学は、平成30年度より融合科学共同専攻における分野融合型研究を推進してきましたが、昨年度より、融合科学共同専攻の活動にとどまらず、両大学間の共同研究の発展と促進を目的に共同シンポジウムを開催しており、今回で第3回目の開催となります。
「AI」をテーマに開催した今回は、寺野 稔学長による開会挨拶後、本学 人間情報学研究領域 池 勇勳准教授、金沢大学 融合研究域 融合科学系 米陀 佳祐准教授、金沢大学 融合研究域 融合科学系 藤生 慎准教授、本学 人間情報学研究領域 岡田 将吾准教授にそれぞれAI技術に関する先進的な研究開発についてご講演いただき、金沢大学 和田 隆志学長の挨拶をもって閉会となりました。
本シンポジウムが、今後の両大学間の共同研究の発展と促進を目的としていることから、各講師の先生方は、自身の研究内容の説明に加えて、「どのような研究分野との共同研究が可能か」という点も併せて講演されました。
また、共同研究のきっかけは研究者同士の雑談からというケースが多いことから、シンポジウム終了後に研究者同士が自由に歓談できる時間を設けました。講演後のリラックスした空間の中、多くの研究者が活発に情報交換を行い、お互いの研究内容について理解を深めました。
オンライン配信とのハイフレックス形式にて開催した本シンポジウムには、両大学から多くの方が参加され、質疑応答の時間にも研究者間による活発な意見交換が行われました。本シンポジウムが今後両大学間の共同研究発展の端緒となるよう推進して参ります。

開会の挨拶をする寺野学長
講演①「無人移動ロボットによる過酷な環境への挑戦」
池 勇勳 准教授
(本学 人間情報学研究領域)

講演②「市街地自動運転の認識技術と実証実験の取り組みについて」
米陀 佳祐 准教授
(金沢大学 融合研究域 融合科学系)

講演③「AIを用いた戦略的次世代型橋梁点検支援システムの開発」
藤生 慎 准教授
(金沢大学 融合研究域 融合科学系)

講演④「マルチモーダルインタラクション研究の展開と課題」
岡田 将吾 准教授
(本学 人間情報学研究領域)

閉会の挨拶をする金沢大学 和田学長

歓談時間の様子
令和6年8月1日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2024/08/01-2.html第3回 金沢大学・北陸先端科学技術大学院大学 共同シンポジウム
| 開催日時 | 令和6年7月29日(月)13:30~17:25 |
| 会 場 | 本学 マテリアルサイエンス系講義棟1階 小ホール ※オンラインにて同時配信(ハイフレックス開催) |
| 対 象 | 両大学の教職員・学生 |
| テーマ | AI |
| プログラム | 13:30~ オープニング(本シンポジウムの趣旨説明等) 13:35~ 開会挨拶 北陸先端科学技術大学院大学 寺野 稔 学長 13:40~14:25 ≪講演1≫ *講演:40分、質疑応答:5分 講演者: 池 勇勳 准教授 (本学 人間情報学研究領域) 講演タイトル:無人移動ロボットによる過酷な環境への挑戦 14:30~15:15 ≪講演2≫ *講演:40分、質疑応答:5分 講演者: 米陀 佳祐 准教授 (金沢大学 融合研究域 融合科学系) 講演タイトル:市街地自動運転の認識技術と実証実験の取り組みについて 15:15~15:45 休憩 15:45~16:30 ≪講演3≫ *講演:40分、質疑応答:5分 講演者: 藤生 慎 准教授 (金沢大学 融合研究域 融合科学系) 講演タイトル:AIを用いた戦略的次世代型橋梁点検支援システムの開発 16:35~17:20 ≪講演4≫ *講演:40分、質疑応答:5分 講演者: 岡田 将吾 准教授 (本学 人間情報学研究領域) 講演タイトル:マルチモーダルインタラクション研究の展開と課題 17:20~17:25 閉会挨拶 金沢大学 和田 隆志 学長 <*終了後~18:00位まで 研究者間の歓談時間> |
| 参加申込 | 下記申込み用フォームからお申込みください https://forms.office.com/r/Jt332kgkih ※会場での参加、オンライン参加ともに事前申込みが必要です。 ※オンライン参加の方には、アクセス用URLをご連絡いただいたメールアドレスに後日送信いたします。 |
| 問合せ先 | 研究推進課 学術研究推進係 内線:1907/1912 E-mail:suishin@ml.jaist.ac.jp |
