研究活動の検索
研究概要(研究室ガイド)やプレスリリース・受賞・イベント情報など、マテリアルサイエンスの研究室により公開された情報の中から、興味のある情報をタグや検索機能を使って探すことができます。無人移動ロボットによる知的環境センシング技術の開拓

無人移動ロボットによる知的環境センシング技術の開拓
移動ロボティクス研究室 Laboratory on Mobile Robotics
准教授:池 勇勳(JI Yonghoon)
E-mail:
[研究分野]
ロボティクス、センサ情報処理
[キーワード]
移動ロボット、ロボットビジョン、環境センシング、 SLAM(simultaneous localization and mapping)
研究を始めるのに必要な知識・能力
線形代数学、確率論等の数学の基礎力と、ロボット工学、計測工学、機械学習の全般的な知識を持っていた方が望ましく、好奇心を持って研究への意欲のある学生であれば歓迎します。自分のアイデアをロボットシステムに実装するために、簡単なハードウェアの制作とプログラミング言語(特にC++又はPython)に慣れている場合は有利です。
この研究で身につく能力
ロボティクスは、機械・電子・情報・制御・計測等の様々な分野の要素技術が融合される分野であり、システムインテグレーション技術が非常に重要です。具体的な研究テーマによって差はありますが、エンジニアとしての幅広い工学的知識を習得可能です。また、当研究室では実際の現場に適用可能な社会実装に焦点を当てた研究を積極的に行っているため、様々な社会ニーズと先端技術とのマッチング能力と、社会に貢献可能な新しい技術を創造する基礎能力を学ぶことができます。
【就職先企業・職種】 製造業、IT系企業、研究職等
研究内容
当研究室では、無人移動ロボットと各種センサ情報処理技術を通じて、実社会における様々な問題解決に貢献可能な研究に取り組んでいます。特に、人間の代わりに災害環境や豪雪環境など過酷な環境内に分布する様々な物理的な情報を計測することで、高度な知的環境認識及び運動制御技術を実現しています。
■被災地探査ロボットシステム
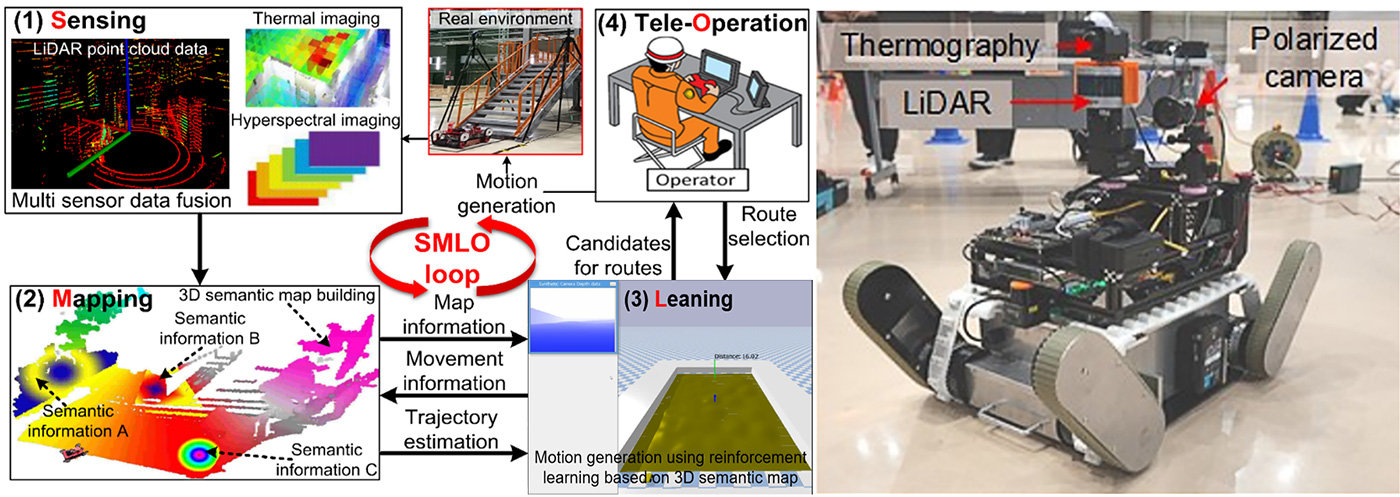 当研究室では、自然災害をはじめ原子力災害等の災害現場において、被害情報収集活動や原子炉建屋内の環境モニタリングを実施するための、半自律移動ロボットによるセマンティックサーベイマップ生成システムを開発しています。具体的には、ロボットに搭載されたサーモカメラやハイパースペクトルカメラ、LiDARなどの複数種類のセンサ情報を取得・融合し、環境の物理的な特徴量を含むマップを生成する技術を開発しています。
当研究室では、自然災害をはじめ原子力災害等の災害現場において、被害情報収集活動や原子炉建屋内の環境モニタリングを実施するための、半自律移動ロボットによるセマンティックサーベイマップ生成システムを開発しています。具体的には、ロボットに搭載されたサーモカメラやハイパースペクトルカメラ、LiDARなどの複数種類のセンサ情報を取得・融合し、環境の物理的な特徴量を含むマップを生成する技術を開発しています。
■自律除雪ロボットシステム
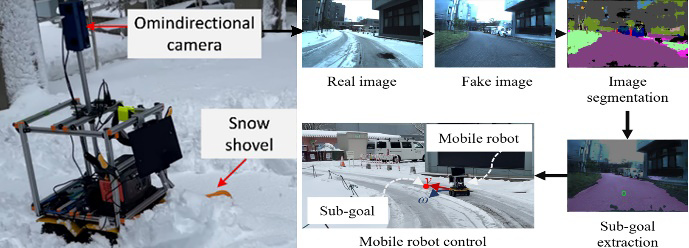 当研究室では、過酷な豪雪による冬期間の積雪環境において、除雪車の自動運転のための基盤技術を開発しており、自律除雪ロボットシステムに搭載したカメラによる周囲環境の知覚能力の向上を図るため、近年驚くほどの技術革新が見られる画像・動画生成AI技術に着目しています。夏季の道路環境と冬季の積雪道路環境との関係性を画像・動画情報により事前に学習しておくことで、冬季にも対応する夏季の偽画像を高精度で生成可能となり、雪に覆われた除雪対象の舗道領域を正確に検出することが可能です。
当研究室では、過酷な豪雪による冬期間の積雪環境において、除雪車の自動運転のための基盤技術を開発しており、自律除雪ロボットシステムに搭載したカメラによる周囲環境の知覚能力の向上を図るため、近年驚くほどの技術革新が見られる画像・動画生成AI技術に着目しています。夏季の道路環境と冬季の積雪道路環境との関係性を画像・動画情報により事前に学習しておくことで、冬季にも対応する夏季の偽画像を高精度で生成可能となり、雪に覆われた除雪対象の舗道領域を正確に検出することが可能です。
また、正確な積雪分布状態の予測による除雪ロボットの高度な経路計画や運動最適化性能を向上させるための研究を行っています。
■特殊環境における自律移動ロボットのナビゲーション
様々なサービスロボットの開発のために不可欠な要素である自律移動ロボットのナビゲーション技術は、ここ数十年間活発に研究されてきた分野であり、最近では既に多くの技術が実用化されつつあります。当研究室では、他にも様々な次世代センサからの計測情報を処理し、多様な特殊環境における自律移動ロボットのナビゲーションの性能を向上させるための研究を行っています。
主な研究業績
- Y. Wang, Y. Ji, H. Woo, Y. Tamura, H. Tsuchiya, A. Yamashita, and H. Asama, "Acoustic Camera-based Pose Graph SLAM for Dense 3-D Mapping in Underwater Environments," IEEE Journal of Oceanic Engineering, 46(3), PP. 829-847, 2021.
- Y. Ji, Y. Tanaka, Y. Tamura, M. Kimura, A. Umemura, Y. Kaneshima, H. Murakami, A. Yamashita, and H. Asama, “Adaptive Motion Planning Based on Vehicle Characteristics and Regulations for Off-Road UGVs,” IEEE Transection on Industrial Informatics, 15(1), pp. 599-611, 2019.
- Y. Ji, A. Yamashita, and H. Asama, “Automatic Calibration of Camera Sensor Network Based on 3D Texture Map Information,” Robotics and Autonomous Systems, 87(1), pp. 313-328, 2017.
使用装置
車輪型およびクローラ型の移動ロボット
LiDAR、測域センサ、光学カメラ、サーモグラフィ、音響カメラ等の環境計測センサ
研究室の指導方針
当研究室では、ロボティクスという学問分野を通じて、多方面に社会に貢献できる人材を育成することを目指しています。そのためには、社会ニーズを把握した上で関連する技術動向を反映させる指導が重要であると考えており、学生には実際の現場に適用可能な社会実装を目標とした研究テーマを与えています。次に、研究成果を世の中に発信するため、すべての学生に対して国内・国際学会発表および学術論文の作成を積極的に推奨しています。最後に、研究室内でのミーティングはもちろん他大学および企業との連携を通じて、複数人のグループでの働き方、コミュニケーション能力、プレゼンテーション能力等も鍛えることを目指しています。
[研究室HP] URL:http://robotics.jaist.ac.jp/
IIP(アイ・アイ・ピー)金沢示野校の生徒の皆さんが来学
7月30日(水)、IIP(金沢示野校)のロボット教室およびこどもプログラミング教室に通う生徒の皆さんと保護者の方々が、施設見学のため本学を訪れました。
当日はキャンパス内のさまざまな施設を巡り、研究や学びの現場を間近にご覧いただきました。なかでも、ロボット工学に関心のある生徒に実際の研究現場を見学させたいとのご要望を受け実施した、人間情報学研究領域の池勇勳准教授の研究室訪問では、池准教授や学生による無人移動ロボットの実演などが行われ、実際にロボットが目の前で動く様子を見ながら、研究の説明に熱心に耳を傾ける姿が印象的でした。
また、情報社会基盤研究センターに設置されている大規模並列計算機「KAGAYAKI」や貴重図書室に所蔵されている『解体新書』(杉田玄白著)、パズル展示施設「JAISTギャラリー」も見学しました。ギャラリーに併設されたプレイルームでは、生徒たちが展示されているパズルに実際に触れ、夢中になって楽しむ様子も見られました。
今回の訪問が、生徒の皆さんにとって今後の進路選択や学びへの関心を深めるきっかけとなるとともに、保護者の方々にとっても、本学の教育・研究活動への理解を深めていただく機会となれば幸いです。





令和7年8月4日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/08/04-3.html福井県立坂井高校の学生さんが来学

12月12日(木)、福井県立坂井高校の生徒30名の皆さんが施設見学のため来学しました。
同校は「マイスター・ハイスクール普及促進事業」の拠点校に指定されており、その一環として大学の最先端技術を学ぶことを目的として行われました。
人間情報学研究領域の池 勇勳准教授の研究室を訪問し、池准教授と学生が無人移動ロボットの実演を行いました。また、情報社会基盤研究センターの大規模並列計算機「KAGAYAKI」や貴重図書室の『解体新書』(杉田玄白著)、パズル展示施設JAISTギャラリーを見学しました。
池研究室のロボット実演では、多くの生徒さんから「おおっ~」という驚きの声も聞こえてきました。皆さんとても熱心に、楽しそうに見学してくださり、ありがとうございました。
池研究室にて無人移動ロボットの実演

大規模並列計算機KAGAYAKIの見学

貴重図書室の見学

JAISTギャラリーの見学
令和6年12月25日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2024/12/25-1.html金沢大学・北陸先端科学技術大学院大学 第3回共同シンポジウムを開催

令和6年7月29日(月)、本学小ホールにおいて、金沢大学・北陸先端科学技術大学院大学 第3回共同シンポジウムを開催しました。
金沢大学と本学は、平成30年度より融合科学共同専攻における分野融合型研究を推進してきましたが、昨年度より、融合科学共同専攻の活動にとどまらず、両大学間の共同研究の発展と促進を目的に共同シンポジウムを開催しており、今回で第3回目の開催となります。
「AI」をテーマに開催した今回は、寺野 稔学長による開会挨拶後、本学 人間情報学研究領域 池 勇勳准教授、金沢大学 融合研究域 融合科学系 米陀 佳祐准教授、金沢大学 融合研究域 融合科学系 藤生 慎准教授、本学 人間情報学研究領域 岡田 将吾准教授にそれぞれAI技術に関する先進的な研究開発についてご講演いただき、金沢大学 和田 隆志学長の挨拶をもって閉会となりました。
本シンポジウムが、今後の両大学間の共同研究の発展と促進を目的としていることから、各講師の先生方は、自身の研究内容の説明に加えて、「どのような研究分野との共同研究が可能か」という点も併せて講演されました。
また、共同研究のきっかけは研究者同士の雑談からというケースが多いことから、シンポジウム終了後に研究者同士が自由に歓談できる時間を設けました。講演後のリラックスした空間の中、多くの研究者が活発に情報交換を行い、お互いの研究内容について理解を深めました。
オンライン配信とのハイフレックス形式にて開催した本シンポジウムには、両大学から多くの方が参加され、質疑応答の時間にも研究者間による活発な意見交換が行われました。本シンポジウムが今後両大学間の共同研究発展の端緒となるよう推進して参ります。

開会の挨拶をする寺野学長
講演①「無人移動ロボットによる過酷な環境への挑戦」
池 勇勳 准教授
(本学 人間情報学研究領域)

講演②「市街地自動運転の認識技術と実証実験の取り組みについて」
米陀 佳祐 准教授
(金沢大学 融合研究域 融合科学系)

講演③「AIを用いた戦略的次世代型橋梁点検支援システムの開発」
藤生 慎 准教授
(金沢大学 融合研究域 融合科学系)

講演④「マルチモーダルインタラクション研究の展開と課題」
岡田 将吾 准教授
(本学 人間情報学研究領域)

閉会の挨拶をする金沢大学 和田学長

歓談時間の様子
令和6年8月1日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2024/08/01-2.html第3回 金沢大学・北陸先端科学技術大学院大学 共同シンポジウム
| 開催日時 | 令和6年7月29日(月)13:30~17:25 |
| 会 場 | 本学 マテリアルサイエンス系講義棟1階 小ホール ※オンラインにて同時配信(ハイフレックス開催) |
| 対 象 | 両大学の教職員・学生 |
| テーマ | AI |
| プログラム | 13:30~ オープニング(本シンポジウムの趣旨説明等) 13:35~ 開会挨拶 北陸先端科学技術大学院大学 寺野 稔 学長 13:40~14:25 ≪講演1≫ *講演:40分、質疑応答:5分 講演者: 池 勇勳 准教授 (本学 人間情報学研究領域) 講演タイトル:無人移動ロボットによる過酷な環境への挑戦 14:30~15:15 ≪講演2≫ *講演:40分、質疑応答:5分 講演者: 米陀 佳祐 准教授 (金沢大学 融合研究域 融合科学系) 講演タイトル:市街地自動運転の認識技術と実証実験の取り組みについて 15:15~15:45 休憩 15:45~16:30 ≪講演3≫ *講演:40分、質疑応答:5分 講演者: 藤生 慎 准教授 (金沢大学 融合研究域 融合科学系) 講演タイトル:AIを用いた戦略的次世代型橋梁点検支援システムの開発 16:35~17:20 ≪講演4≫ *講演:40分、質疑応答:5分 講演者: 岡田 将吾 准教授 (本学 人間情報学研究領域) 講演タイトル:マルチモーダルインタラクション研究の展開と課題 17:20~17:25 閉会挨拶 金沢大学 和田 隆志 学長 <*終了後~18:00位まで 研究者間の歓談時間> |
| 参加申込 | 下記申込み用フォームからお申込みください https://forms.office.com/r/Jt332kgkih ※会場での参加、オンライン参加ともに事前申込みが必要です。 ※オンライン参加の方には、アクセス用URLをご連絡いただいたメールアドレスに後日送信いたします。 |
| 問合せ先 | 研究推進課 学術研究推進係 内線:1907/1912 E-mail:suishin@ml.jaist.ac.jp |

学生のLEさんがSII2024にてBest Student Paper Awardを受賞

学生のLE, Nhat Dinh Minhさん(博士後期課程3年、人間情報学研究領域、ホ研究室)がThe 2024 16th IEEE/SICE International Symposium on System Integration(SII2024)においてBest Student Paper Awardを受賞しました。
SII2024は、VNU工科大学が主催し、1月8日~11日にかけてベトナム(ハロン)にて開催された国際会議です。IEEE/SICE SIIはシステムインテグレーションに関する最先端技術と将来の展望を提示する主要な会議で、産業界の専門家、研究者、学者がフロンティア技術、画期的で革新的なソリューション、アプリケーションに関するアイデアや経験を共有することを目的としています。システムインテグレーションはキーテクノロジーのひとつであり、新世紀における産業システムや社会システムの問題を解決するためには、ハードウェアとソフトウェアの統合が特に重要になります。SII2024では、システムインテグレーションの新しい研究と産業応用に焦点を当て、その有効性を向上させるためのアプローチと方法論について議論が交わされました。
Best Student Paper Awardは、同会議において最も優れた研究成果を発表した学生に授与されるものです。
※参考:SII2024
■受賞年月日
令和6年1月10日
■研究題目
Distributed Cascade Force Control of Soft-Tactile-Based Multi-Robot System for Object Transportation
■研究者、著者
Duy Anh Nguyen(University of Prince Edward Island)、Nhat Minh Dinh Le、Nhan Huu Nguyen、Pham Duy Hung(University of Engineering and Technology (VNU-UET))、Van Anh Ho、Trung Dung Ngo(University of Prince Edward Island)
■受賞対象となった研究の内容
In this paper, we present a distributed cascade force control system (DCFC) for multiple robots with the aim of pushing a rigid object towards a desired moving target without their inter-robot communication. These mobile robots are equipped with 360-degree vision-based soft tactile sensors utilized to determine contact location and resultant impact force. By investigating the dynamics of moving rigid objects on the flat, we proposed a distributed cascade control. The inner loop control incorporates contact force and positioning, ensuring the robots' pushing contact and applying the desired force to the object. The outer loop control coordinates the robots to push the object in a desired direction without inter-robot communication, regardless of unknown object mass and friction uncertainty. The stability and convergence of the control system are verified using the Lyapunov stability theory. We also conducted simulation and real-world experiments to validate the performance of the proposed control method, and the experimental results showcase the successful coordination of multiple robots in pushing an object towards a moving desired direction.
■受賞にあたって一言
I am incredibly grateful to every author who contributed to this project especially Lecturer Pham Duy Hung, Assistant Professor Nguyen Huu Nhan, Professor Trung Dung Ngo and Associate Professor Ho Anh Van. Without your dedication, expertise, and unwavering support, receiving this best student paper award at SII2024 would not have been possible. Besides, I extend my huge thanks to Nguyen Anh Duy for going above and beyond! His hard work led to incredible results, and his presentation at SII2024 was simply amazing. I'm particularly thankful to the JAIST Off-Campus Research Grant Program for providing me with the invaluable opportunity to conduct research in Canada. This experience significantly enhanced my abilities and boosted more productive collaboration within our team. Together, we were able to achieve remarkable progress, and this award serves as a powerful proof of our efforts. Looking ahead, I'm excited to continue building upon this momentum and explore new research avenues alongside my talented colleagues and greatest professors.
令和6年2月27日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2024/02/27-1.html人間情報学研究領域のホ准教授らが国際会議RSS2023においてBest System Paper Awardの Finalistに選出

人間情報学研究領域のホ アン ヴァン准教授、修了生のBUI, Son Tienさん(令和5年3月博士後期課程修了、ホ研究室)および河野 晋也さん(令和5年3月博士前期課程修了、ホ研究室)が国際会議Robotics : Science and Systems(RSS)2023において発表した論文が、Best System Paper AwardのFinalistに選出されました。
RSSは、ロボティクス分野で権威あるトップカンファレンスの一つです。第19回となった今回は、令和5年7月10日から14日にかけて、韓国テグにて開催されました。
*参考:RSS2023
■年月日
令和5年7月14日
■研究題目、論文タイトル等
ROSE: Rotation-based Squeezing Robotic Gripper toward Universal Handling of Objects
■研究者、著者
Son Tien Bui, Shinya Kawano, Van Anh Ho
■対象となった研究の内容
本研究で提案したバラの花の機能と美しさに着想を得たROSE(ROtation-based-Squeezing grippEr)ロボットハンド(以下、ROSEロボットハンド)は、大面積接触と閉じた構造を特徴とし、より優しい把持接触と汎用的な把持性能を実現した。具体的に、ROSEロボットハンドでは、柔らかい素材であるソフトマテリアルを使用したスキンを作成し、樹脂製の軸部分の回転により動作するシンプルな機構を提案した。これにより、把持物を傷つけず、かつ制御の複雑さを軽減することに成功した。また、少量のソフトマテリアルと樹脂素材を用いた回転部分を3Dプリントにより形成することで安価に製作できる。さらに、ROSEロボットハンドの空間を閉じようとする動作により、単純な把持のみならず掴む動作も行えるため、把持対象が限定されない。
■選出にあたって一言
この度、RSSのようなトップ国際会議にBest System Paperファイナリストとして選ばれたのは、大変光栄です。この研究に貢献してきたHo研究室の修了生や現在のメンバーなどに感謝いたします。
令和5年8月3日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2023/08/03-1.html"ROSE"ハンド:バラの花から着想を得た包み込むように掴むロボットハンドを開発

"ROSE"ハンド:バラの花から着想を得た包み込むように掴むロボットハンドを開発
ポイント
- バラの花から着想を得て、物を包み込むように掴むソフトロボットハンドを開発した。
- ロボットハンドとして十分な把持力を持ちながら、素材にソフトマテリアルを使用することで把持物やその周辺を傷つけずに掴むことが可能である。
- ロボットハンド制御の複雑性を軽減させたシンプルな構造かつ優れた耐久力を持っており、多様な用途に使用できるため、幅広い分野での社会実装が期待される。
| 北陸先端科学技術大学院大学(学長・寺野稔、石川県能美市)人間情報学研究領域のホ アン ヴァン(Ho Anh Van)准教授は、バラの花から着想を得て、物を包み込むように掴み、かつ汎用性に優れたソフトロボットハンドを開発した。開発したロボットは、簡素化された制御機能と優れた耐久性を有しており、今後、農業分野における収穫作業代替ロボットとしての普及だけでなく、幅広い分野への応用が期待される。 |
【研究の背景と目的】
昨今、様々な分野でソフトハンドロボットが導入されている。特に、農業分野においては、ロボットハンドによる収穫作業の自動化が進められており、「農作物を傷つけずに収穫する」ための有用な手段として注目されている。
農業用のロボットハンドとしては、デリケートな農作物を把持することが可能なものがすでに開発されているが、イチゴやモモといった特にデリケートな農作物を対象とした把持の結果は芳しくない。また、ロボットハンドの普及が進まない原因の一つとして、ロボットが高価であることが挙げられる。ソフトロボットを含めたこれまでのロボットハンドは、対象物に特化した専用のロボットハンドとして開発されており、それに加えて、高度なセンシングや制御を必要としている。そのため、開発コストが高まることでロボットハンドの価格が上昇し、導入コストに影響していると考えられる。
本研究では、これらの課題を解決するため、"低価格であり、収穫物を傷つけない優しい把持が可能で、十分な力を持つロボットハンド"をコンセプトに、新しい農業用ロボットハンドの開発を目指した。さらに、農業だけでなく他分野での活用を視野に入れた、対象物を選ばず、また把持物とその周辺を傷つけずに把持することができるロボットハンドの実現を目指した。
【研究の内容】
■アイデア:
設計概念として、1)収穫物を傷つけないためにソフトマテリアルを用いる、2)ロボットハンドの制御を簡素化する、3)製作コストを低くする、4)対象物を選ばず汎用性に優れた把持を実現する、ことを目指した。以上を踏まえ、本研究で提案したバラの花の機能と美しさに着想を得たROSE(ROtation-based-Squeezing grippEr)ロボットハンド(以下、ROSEロボットハンド)は、大面積接触と閉じた構造を特徴とし、より優しい把持接触と汎用的な把持性能を実現した(図1、2)。
具体的に、ROSEロボットハンドでは、柔らかい素材であるソフトマテリアルを使用したスキンを作成し、樹脂製の軸部分の回転により動作するシンプルな機構を提案した。これにより、把持物を傷つけず、かつ制御の複雑さを軽減することに成功した。また、少量のソフトマテリアルと樹脂素材を用いた回転部分を3Dプリントにより形成することで安価に製作できる。さらに、ROSEロボットハンドの空間を閉じようとする動作により、単純な把持のみならず掴む動作も行えるため、把持対象が限定されない。

図1:開発したROSEロボットハンド
図2:設計概念
■特徴:
図2のように、ROSEロボットハンドの先端は半球の頂点を押し込み、窪ませた様な形状をしている。この窪みの底を軸とし、外側のスキンとこの軸を逆方向に回転させることでスキンにねじれを発生させ、それが窪んだ空間を閉じるように動作し把持を可能としている。従来の人の指を模倣したようなソフトロボットハンドでは適切な姿勢制御が必要であるが、ROSEロボットハンドは大面積接触と閉じた構造により、様々な対象物の把持を可能としている。特に、従来のロボットハンドでは困難であった油に浸した対象物の把持が可能であることが実験で示された(図3)。

図3:オリーブオイルタンクから浸したゆで卵の把持の様子
■動作ビデオ(YouTubeへリンク):https://youtu.be/E1wAI09LaoY
■他の技術との差:
前述したように、農業用ロボットハンドの課題の一つとして、収穫物を傷つけず、かつ潰さずに収穫することが挙げられる。この課題を解決するために様々な農業用ロボットハンドが開発されているが、特定の農作物の収穫に限られたものが多く、高価な導入コストという問題までは完全に解決できていない。
一方、このROSEロボットハンドは、対象物を選ばない把持が特徴である。通常のソフトロボットハンドは制御が難しいが、ROSEロボットハンドはそのシンプルな機構によりこの種の課題を解決した。例えば、農業用ロボットハンドでは、主に人の指を模したロボットハンドが多く使用されるが、把持の際に対象物の形状や柔らかさなどによって制御を工夫しなければならない。ROSEロボットハンドは、空間を閉じる動作により包み込むような把持を行うため、対象物によって制御を変える必要がなく、対象物を選ばずに把持することが可能である。結果として、導入コストの軽減につながると考えられる。
また、ROSEロボットハンドは、耐久性に優れている。耐久実験として、「把持対象物の上空からスタート→対象物まで下降→把持→持ち上げ→再び元の対象物があったところまで下降→把持解除→スタート地点へ戻る」という一連の流れを繰り返し行った。その結果、40万回の把持動作に成功した。それ以降は、スキンが破損したものの把持力の低下は見られなかった(図4a)。
さらに、把持した状態での引張強さを測定指標とし、把持力の測定を行った。ROSEロボットハンドが物体を掴み、保持し続けたままで、ROSEロボットハンドにかかる垂直方向の荷重を増加させ、破損するまでの荷重を計測した。その結果、平均400Nの荷重に耐えられることが分かり、耐久性が十分であることが確認できた(図4b)。
このように、従来のソフトロボットハンドの課題の一つとして挙げられる耐久性も十分に備えており、ROSEロボットハンドは他の技術と差別化できる優れたソフトロボットハンドである。

図4:(a)繰り返し動作による耐久実験の様子
(b)把持力の測定の様子

本研究成果は、2023年7月10日から14日まで韓国で開催の国際会議Robotics: Science and Systems (RSS2023)で発表された。
なお、本研究は、国立研究開発法人科学技術振興機構(JST)・戦略的創造研究推進事業さきがけ「IoTが拓く未来」研究領域(JPMJPR2038) (研究課題「タッチIoT : 触れるインターネット実現のための肌感覚送受信機の開発」)の支援を受け行った。
【波及効果・今後の展開】
従来のロボットハンドは把持が対象物に特化しており、精緻であるが汎用性に優れていなかった。これは、対象物や周辺に危害を加えないために必要不可欠な要素として、対象物によって特定のセンシングや制御を設定していたためでもある。しかし、昨今のソフトロボティクス研究の発展により、新たな機構を持つソフトロボットハンドが開発されている。ソフトロボットハンドは、柔らかい素材や空気などを使用した機構などが多く、制御面の工夫が強みである。ROSEロボットハンドもその一つであり、他のソフトロボットハンド同様に、今後需要が増加していくと考えられる。
ここで、本提案技術が想定する製品・サービスとして、次の二つを挙げる。第一に、果物の種類を選ばずに収穫作業を代替するロボットである。第二に、被介護者のQOL(Quality of life)を向上させるための生活支援介護ロボットである。本提案技術の汎用性を基に、幅広い分野でこれらの製品と新たなサービスを提供することで、ソフトロボットハンドの普及促進が期待される。
【論文情報等】
| 題目 | ROSE: Rotation-based Squeezing Robotic Gripper toward Universal Handling of Objects |
| 著者 | Son Tien Bui, Shinya Kawano, Van Anh Ho |
| 国際会議名 | Robotics: Science and System(RSS2023) |
| 会議発表日 | 2023年7月13日 |
| 論文掲載URL | https://roboticsproceedings.org/rss19/p090.html |
| DOI | 10.15607/RSS.2023.XIX.090 |
令和5年7月14日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2023/07/14-1.html協調ロボットの未来:広範囲触覚・近接センシングの簡易な実現に成功

協調ロボットの未来:広範囲触覚・近接センシングの簡易な実現に成功
ポイント
- 周囲の環境や人に対する安全な動作を実現するための近接覚と、利用者に対して安心感を提供する触覚、2つの感覚を備えたセンシングロボットアームの開発に成功した。
- 広範囲なセンシング機能を備えていながら、複雑な配線がなく、シンプルかつ耐久性の高い設計を実現した。
- センシング装置におけるデジタルツインを構築することによって、データ駆動型のセンシング機能を備えることができ、Sim2Real[用語説明]の効果を高めることにも成功した。
| 北陸先端科学技術大学院大学(学長・寺野稔、石川県能美市)人間情報学研究領域のホ アン ヴァン(Ho Anh Van)准教授は、視覚による触覚・近接検知装置を備えたロボットアームの開発に成功した。これにより、ロボットと人間とのインターフェースに関して、人工知能(AI)を活かした人間とCyber-Physical System (CPS) [用語説明]環境における、新たな価値を創出する研究につながることが期待される。 |
【研究の背景と目的】
これまでの産業用ロボットの考え方では、人間とロボットは作業領域が明確に分離されており、ロボットは人間の安全半径内に立ち入ることが許されなかった。これは、第一義的には人間を危険から守るためだが、一方で、産業用ロボットの安全性に関する技術・研究の発展を阻害していた側面がある。安全性の確保は、最低限のセンシング技術と簡易なフェイルセーフ機能で十分とされ、研究開発のリソースは、より製品の競争力を高めるためのロボットの高速化・高精度化に注ぎ込まれてきた。しかしながら、近年の我が国における労働力不足や長引くコロナ禍による新しい生活様式の中で、これまで人間の手で行ってきた作業をロボットで代替しようとする動きが急速に高まってきている。さらに、全ての人が健康的な生活を送ることができる社会を目指すSDGsの大きな流れが加わり、現在ロボット技術に人間との調和、つまりロボットが人間と共存し、さらに人間とコラボレーションすることが強く求められている。
例えば、ロボットが人間をサポートする技術として、アームで人間を支える介護ロボットでは、介護サービスの提供を受ける人間が安心感を得られる触覚センシングの活用が検討されている。触覚は、人間同士の触れ合いにおいては愛情や信頼、思いやりを伝える重要な感覚である。しかし、ロボットの触覚技術は長年研究されてきているが、視覚技術の研究と比較すると未だ応用例は極めて少ない。また、同時に周囲の人間や環境に対する安全性を確保するためには、ロボットが周辺状況を高い精度で検知する必要があるが、特に外付けのカメラを利用する場合に、アームや利用者によって遮蔽される領域が多く、アームの近接領域の検出が困難となっている。
このような問題点に鑑み、今回、利用者が安心感を得られる接触と、安全な動作を実現する近接の両方の感覚を兼ね備えたロボットアームの技術を提案した。本研究において実現される近触覚・接覚のセンシング技術では、人間を含む周囲の環境を認識し、自立的な判断行動が可能となるロボットアームを開発することで、衝突回避等の安全性だけではなく、接触が許容される状況の判断および接触を通じた安心感の提供といった機能を有する、人工知能(AI)を搭載した協働ロボットの実現を目指す(図1)。

図1:本研究の位置付け
【研究の内容】
本研究では、低コストかつシンプルな構造を有する柔軟な触覚装置と、人間との接触を即時に検知することで、人間の行動を推定しながら人間と調和するロボットを実現した。このロボットは、人間の皮膚を模した柔軟なスキン上の複数の接触点へ加えられた力を、ロボットアームの両端に設置されたカメラが、スキンの変形の状態をリアルタイムで測定する技術によって実現した。さらに、透明なシリコンゴムと薄い柔軟な高分子分散液晶(PDLC)フィルムを組み合わせることで、柔軟なスキンの透明性をアクティブに切り替えることが可能となった(図2)。利用するPDLCフィルムは、外部から小さな電圧を印加することにより、透明/不透明を切り替えることができる。この透明/不透明の切り替えでは、近接覚と触覚の二つのモードを備え、またそのモードをシームレスに切り替えることができる。
図2:設計概念
(図2)
(右)近接覚モード(PDLCが透明):スキン内部の2台のカメラは、スキン近傍の外部オブジェクトを検知できる。
(左)触覚モード(PDLCが不透明):これまでの研究成果と同様、2台のカメラが接触または相互作用下でのスキンの歪みを検知し、触覚または力のセンシングが可能となる。
本研究で使用したロボットアームは、柔軟なスキンの内側に格子状のマーカーを備え、スキン内部に2台の小型カメラを配置している。スキンの透明性の能動的な切替えにより、近接覚と広範囲の触覚をセンシングする独創性の高い手法である。圧力センサを用いずカメラによるマーカーの変位から外力を算出することから、配線の複雑さやオクルージョン (光学遮蔽)などをほぼ完全に無くすことに成功しており、高いセンシング精度と耐久性を実現した。さらに、各モジュールの内圧を変えることでスキンの柔らかさを調整し、スキンに触れた人間に対する触感についても、制御可能である。さらに、深層学習を通じて多様な近接・接触動作・状況を予め学習させることで、人間と調和し、人間との複雑な近接・接触を実現する潜在的に高い適応性を持つと期待される。
 図3:各動作モード
図3:各動作モード
<参考動画>
動作ビデオ1:https://youtu.be/NN2u8YBLITY
動作ビデオ2:https://youtu.be/m8QzvDx_vpc
今日、ロボットは、いわゆる物理的な人間とロボットの相互作用(pHRI;physical Human-Robot Interaction)シナリオのように、安全半径の外で動作しつつ、人間と同じワークスペースを共有し(共存)、さらには人間と相互作用(コラボレーション)する必要がある。pHRIでは、ロボットは衝突の可能性を回避するだけでなく、避けられない物理的接触と意図的な物理的接触の両方を安全かつ信頼できる方法で対応することが期待されている。これを達成するために、深度カメラと力/トルクセンサーの組み合わせが提案されているが 、これは、外部カメラを使用するために、先述した視覚の遮蔽の問題を有している。近年、マルチモーダル知覚(触覚、近接など)を備えた大規模センサースキンが開発されたが、センサーネットワークのデータ取得と処理が複雑であるため、微調整が困難であり、衝突等の突発的な事故への応答が遅くなる可能性がある。
本研究は、ロボットの周りの多様な近接や接触動作・状況などをたった2台のカメラで検知することが可能なシンプルな構造をしており、信頼性を持つpHRIの実装方法となり得る。また、Sim2Realのプロセスで、実物の特性を再現できるデジタルツインにおいて、必要なデータ収集や学習などをシミュレーション環境で実施し、学習の結果を、実物に反映させることができ、今後の研究・開発の時間を大幅に縮小することも期待される。
本研究成果は、2023年2月28日にIEEE(米国電気電子学会)が発行する学術雑誌「IEEE Transactions on Robotics」のオンライン版に掲載された。また、2023年4月3日から7日までシンガポールで開催の、国際会議IEEE-RAS International Conference on Soft Robotics (RoboSoft 2023)で発表された。
なお、本研究は、国立研究開発法人科学技術振興機構(JST)・戦略的創造研究推進事業さきがけ「IoTが拓く未来」研究領域(JPMJPR2038)の支援を受け行った。
【今後の展開】
本研究によって、今後の展開が期待される製品・サービスとして、次の二つが挙げられる。一つ目は、利用者がより多くの事を自分自身でできるように支援し、さらに利用者に加え、周りの状況も考慮したロボットアームを備えた車椅子への活用である。二つ目に、サービスの提供を受ける利用者に安心感や大事にされているという感覚、思いやりなどを伝えることができる介護ロボットである。将来的に、これらの製品が介護保険等の給付対象として認可されることで普及促進へと繋がることが期待される。
【論文情報等】
| (1) | |
| 題目 | Simulation, Learning, and Application of Vision-Based Tactile Sensing at Large Scale |
| 雑誌名 | IEEE Transactions on Robotics |
| 著者 | Quan Khanh Luu, Nhan Huu Nguyen, and Van Anh Ho |
| 掲載日 | 2023年2月28日 |
| DOI | 10.1109/TRO.2023.3245983 |
| (2) | |
| 題目 | Soft Robotic Link with Controllable Transparency for Vision-based Tactile and Proximity Sensing |
| 国際会議名 | the 6th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2023) |
| 著者 | Quan Luu, Dinh Nguyen, Nhan Huu Nguyen, anh Van Anh Ho |
| 発表日 | 2023年4月6日 |
【用語解説】
コンピュータ内のシミュレーション等で学習したモデルを現実世界に用いるという強化学習の手法。
実世界(フィジカル)におけるデータを収集し、サイバー世界でデジタル技術などを用いて分析・知識化を行い、それをフィジカル側にフィードバックすることで、産業の活性化や社会問題の解決を図っていく仕組み。
令和5年4月12日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2023/04/12-1.html人間情報学研究領域のホ准教授のインタビュー記事がJST「サイエンスウィンドウ」に掲載されました
人間情報学研究領域のホ アン ヴァン准教授のインタビュー記事が、科学技術振興機構(JST)が運営するウェブマガジン「サイエンスウィンドウ」に掲載されました。
ホ准教授が取り組む、シリコンなどの柔らかい素材を使用した"ソフトロボット"の研究内容のほか、研究者としてのキャリアや、本学の研究環境についても紹介されています。ぜひご覧ください。
インタビュー記事はこちら(外部リンク)
JST Science Portal「サイエンスウィンドウ」特集記事【海を越えてきた研究者たち】
柔らかいロボットで人と協働する社会を
https://scienceportal.jst.go.jp/gateway/sciencewindow/20230215_w01/index.html
「サイエンスウィンドウ」は、科学技術振興機構(JST)が運営する、魅力あふれる科学の取り組みを分かりやすく紹介するWebマガジンです。多くの方にとって科学技術が身近なものになるよう、科学と暮らしの関係にフォーカスした情報をタイムリーに発信しています。
令和5年2月17日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2023/02/17-1.html人間情報学研究領域のホ准教授がIEEEシニアメンバーに昇格
人間情報学研究領域のホ アン ヴァン准教授がIEEEシニアメンバーに昇格しました。
IEEE(米国電気電子学会)は、人類社会の有益な技術革新に貢献する世界最大の専門家組織で、世界160ヵ国以上、42万人を超える会員がいます。論文等出版、国際会議の開催、標準規格の策定、教育・キャリア形成の支援、表彰、会員のコミュニケーション支援などの活動を通じて、コンピュータ、バイオ、ロボテック、通信、電子、電力、航空、などのさまざまな分野で指導的な役割を担っています。
シニアメンバーは、少なくとも10年間専門的業務に携わっており、そのうち少なくとも5年間にわたり優れた業績を挙げた者に認められる会員資格です。
■承認日
令和4年2月19日

令和4年10月14日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2022/10/14-1.html協生AI×Design リサーチコアセミナー「万有情報網 ~自律共生するIoT環境~」

セミナーを下記のとおりネット配信方式で開催しますので、ご案内します。
カメラ付きパソコン、スマホ、タブレットなどからご参加いただけます。
| 開催日時 | 令和4年7月26日(火)10:00~11:40 |
| 実施方法 | ネット配信方式 |
| 講演題目 | 万有情報網 ~自律共生するIoT環境~ |
| 講 師 | 東京大学 インクルーシブ工学連携研究機構 機構長 大学院工学系研究科 教授 川原 圭博 氏 |
| 参加申込 | 学外の方は下記の事務担当へ前日までにご連絡ください。 (参加費無料) 【お問合せ】 北陸先端科学技術大学院大学 協生AI×デザイン拠点 HO Anh-Van (事務担当:研究施設支援係 sien@ml.jaist.ac.jp) |
「e-messe kanazawa 2021(第36回いしかわ情報システムフェア)」に出展

7月16日(金)~17日(土)の2日間、石川県産業展示館3号館で、日本海側最大規模のICTビジネスショーである「e-messe kanazawa 2021(第36回いしかわ情報システムフェア)」が開催され、本学からリサーチコア「協生AI×デザイン拠点」のホ アン ヴァン准教授(知能ロボティクス領域)が出展しました。
ホ准教授はソフトロボティクス(柔らかいロボットを扱う研究)の紹介として、柔らかいドローンのプロペラ、柔らかいロボットアーム、コンタクトレンズをつまみ上げるようなソフトハンドの3点を展示しました。
本学ブースには、企業関係者、大学・研究関係者、大学生・高専生、一般の方など2日間で延べ240名もの方々が来訪され、活発な情報交換の場となりました。
 |
| 本学出展ブースにおける展示の様子 |
令和3年7月20日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2021/07/20-1.htmle-messe kanazawa 2021(第36回いしかわ情報システムフェア)に出展
7月16日(金)~17日(土)の2日間、石川県産業展示館 3号館(石川県金沢市袋畠町)で日本海側最大のICTのビジネスショーである「e-messe kanazawa 2021(第36回いしかわ情報システムフェア)」が開催されます。
本学からは、知能ロボティクス領域のホ アン ヴァン准教授が以下の内容について出展します。
ご来場の際はぜひお立ち寄りください。
| 日 時 | 令和3年7月16日(金)~17日(土)10:00~17:00 ※新型コロナウイルス感染症対策として、来場者は事前登録が必要です。 登録は、e-messe kanazawa 公式ホームページ から行ってください。 |
| 会 場 | 石川県産業展示館 3号館(石川県金沢市袋畠町南193番) |
| 展示内容 | 先端科学技術研究科 知能ロボティクス領域 ホ アン ヴァン准教授 「人間を安全に優しくサポートするロボットの新たなかたち、『ソフトロボティクス』のご紹介」 |
| ブース番号 | 113番 |
詳細はこちらをご覧ください。
・e-messe kanazawa 2021 公式ホームページ
・e-messe kanazawa 2021 リーフレット
知能ロボティクス領域のホ准教授の研究課題がJST「研究成果最適展開支援プログラム (A-STEP)」に採択
知能ロボティクス領域のホ アン ヴァン准教授が提案した研究課題が、科学技術振興機構(JST)の「研究成果展開事業研究成果最適展開支援プログラム(A-STEP)トライアウトタイプ:with/postコロナにおける社会変革への寄与が期待される研究開発課題への支援」に採択されました。
「A-STEPトライアウト」は、大学等の研究成果に基づいた技術の実現可能性を検証する公募型の研究開発費支援制度(研究費支援)と、マッチングプランナーによる産と学のマッチングや事業化に向けての研究開発活動の支援(人的支援)により、本格的な産学共同研究開発への移行へつなぐプログラムです。
今回採択された「トライアウトタイプ:with/postコロナにおける社会変革への寄与が期待される研究開発課題への支援」は、「with/postコロナ社会の変革」や「社会のレジリエンス向上」を含めた社会課題の解決に資する、大学等の研究成果に基づいた、開発ニーズを持つ企業などが着目する技術の実現可能性を検証するための試験研究を、令和3年度公募を前倒しする形で、A-STEPトライアウトの形式を利用し、「トライアウトタイプ」として実施し、民間企業の投資意欲を刺激するとともに、with/postコロナ社会に資する新規性と経済的なインパクトを有する研究開発成果の社会的実装を加速することを目指します。
*詳しくは、JSTホームページをご覧ください。
【研究者名】知能ロボティクス領域 ホ アン ヴァン 准教授
■研究課題名
人手に代わり食品を取扱い可能なユニバーサルロボットハンドの開発
■研究概要
本研究は、様々な食品を、1つのロボットハンドで取り扱うことが可能となることで、設置やメンテナンスのコストを削減し、またロボットの稼働率を高めることを目指しています。そのため、柔らかい指先を模した機構や触覚センシングなどの独自技術を統合し、把持力を発揮する剛性と、壊れやすい食品を傷つけないソフトな接触を両立するロボットハンドを実現します。
令和3年4月13日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2021/04/13-2.html知能ロボティクス領域のHO准教授が2019年IEEE名古屋支部若手奨励賞を受賞

知能ロボティクス領域のHO, Anh Van准教授が2019年IEEE名古屋支部若手奨励賞を受賞しました。
IEEE (Institute of Electrical and Electronics Engineers)は、アメリカ合衆国に本部を置く工学を専門とする世界最大の学会であり、現在160ヵ国以上に、40万人を超える会員がいます。 IEEEには約300の支部があり、IEEE名古屋支部はその一つで、東海地区(愛知、岐阜、三重、静岡)および北陸地区(福井、石川、富山)に在住する IEEE 会員によって構成され、現在約1,400名の会員がいます。
IEEE名古屋支部若手奨励賞(IEEE Nagoya Section Young Researcher Award)は、IEEE名古屋支部所属の35歳以下の若手支部会員を対象として、IEEE発行の雑誌に採録された実績やIEEEの活動に貢献した業績などを評価し、授与されるものです。
■受賞年月日
令和元年12月14日
■受賞にあたっての一言
この度、IEEE名古屋支部若手奨励賞を受賞し、大変光栄に思います。日頃から、研究に協力いただいているSoft Haptics研究室のメンバーやその他関係者に感謝を申し上げます。

令和元年12月24日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2019/12/24-1.html