研究活動の検索
研究概要(研究室ガイド)やプレスリリース・受賞・イベント情報など、マテリアルサイエンスの研究室により公開された情報の中から、興味のある情報をタグや検索機能を使って探すことができます。2025年度JST戦略的創造研究推進事業(CREST・ACT-X)に採択
国立研究開発法人科学技術振興機構(JST)の「戦略的創造研究推進事業(CREST・ACT-X)」において、本学の研究提案からCREST1件、ACT-X1件が採択されました。
採択者および採択課題は以下のとおりです。
【CREST】
研究代表者:ナノマテリアル・デバイス研究領域 ホ アン ヴァン教授
研究課題名:Cross-X: AI 駆動型の触覚・近接センシングおよび適応的コンポーネントによる、多様な形態に対応した身体知能の実現
研究領域:実環境知能システムを実現する基礎理論と基盤技術の創出
研究概要:
本研究は、全身にわたるマルチモーダルセンシングを、適応的形態、事前学習知識、継続学習と統合し、迅速かつ頑健に応答できる物理知能モジュールを構築することを目的とする。さらに、各モジュールにおける局所的なセンシング・駆動から、ロボット全体における統合的な機能発現へと至る「身体知能」の科学的基盤を確立し、次世代ロボティクスの新しいパラダイムを切り拓くことが期待される。
【ACT-X】
研究代表者:コンピューティング科学研究領域 鎌田 斗南助教
研究課題名:連続と離散を横断する計算基盤の確立と実問題への接続
研究領域:次世代 AI を築く数理・情報科学の革新
研究概要:
近年の計算機科学の発展により、実社会の多様な課題を計算機で扱うことが可能となった。しかし、社会課題の多くは本来的に連続的であり、計算機が扱う離散的な近似との間には根本的な差異がある。そのため、問題の困難性と容易性の境界を理解するためには、連続性を計算機上で扱う新たな枠組みが必要である。本研究では、実社会の問題を実数変数の決定問題としてモデル化し、その計算量解析を通じて、体系的な数理基盤を確立する。
CREST:
CRESTは、我が国が直面する重要な課題の克服に向けて、独創的で国際的に高い水準の目的基礎研究を推進し、社会・経済の変革をもたらす科学技術イノベーションに大きく寄与する、新たな科学知識に基づく創造的で卓越した革新的技術のシーズ(新技術シーズ)を創出することを目的とするネットワーク型(チーム型)研究です。
「実環境知能システムを実現する基礎理論と基盤技術の創出」領域では、実環境・物理空間における多様かつ予測困難な状況変化に対して柔軟かつ安全に対応できる知能システム(Physical AI)の構築に向けた基礎学理と基盤技術の創出を目指します。AI とロボティクスやIoT との連携により AI に身体性を付与するなど、知能、機械、数理、制御、計算、通信、神経科学等の学術分野の融合による高度な知能システム構築に資する研究開発を推進します。
▶ 戦略的創造研究推進事業(CREST)
ACT-X:
ACT-Xは、我が国が直面する重要な課題の克服に向けて、優れた若手研究者を発掘し育成することを目的としたネットワーク型(個人型)研究です。
「次世代AIを築く数理・情報科学の革新」領域では、既存のAI技術の限界・困難を克服するため、AI 技術・情報科学および数学・数理科学、その他様々な研究分野の融合・応用による AI技術の高度化や適用範囲の拡大などの、挑戦的な研究課題に取り組む若手研究者を支援することで、新しい価値の創造につながる研究開発を推進します。
▶ 戦略的創造研究推進事業(ACT-X)
令和7年9月29日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/09/29-2.html人と安全に協働できる"ソフトロボットリンク"を開発 触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
人と安全に協働できる"ソフトロボットリンク"を開発
触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
【ポイント】
- 透明・不透明を切り替えられるソフトスキンと視覚センサーを用い、近接センシングとスキン変形の解析による触覚センシングを備えたマルチモーダルソフトセンシング技術「ProTac」を開発
- 市販ロボットアームにも取り付け可能
- 従来の剛体リンクでは困難とされる、接触の多い環境下での動作制御が可能
- 農業や介護など、人とロボットが協働する作業への応用に期待
- AI駆動型センシングフュージョン技術
| 北陸先端科学技術大学院大学 ナノマテリアル・デバイス研究領域のクアン・ハン・ルウ研究員、ホ・アン・ヴァン教授らの研究チームは、透明・不透明を電圧により切り替えられるソフト素材と視覚センシング技術を融合し、近接・触覚の両モードを切り替えて検知できるマルチモーダルソフトセンシング技術「ProTac」を世界で初めて開発しました。ProTacを用いたソフトロボットリンクは、周囲の物体を検知する近接センシングとマーカー画像の変化から触覚情報を読み取る触覚センシングを一台で切り替えて行うことができ、人との接触が多い環境で安全に動作制御が可能です。なお、本研究成果は、2025年7月28日にIEEE Transactions on Robotics(T-RO)に掲載されました。 |
【研究概要】
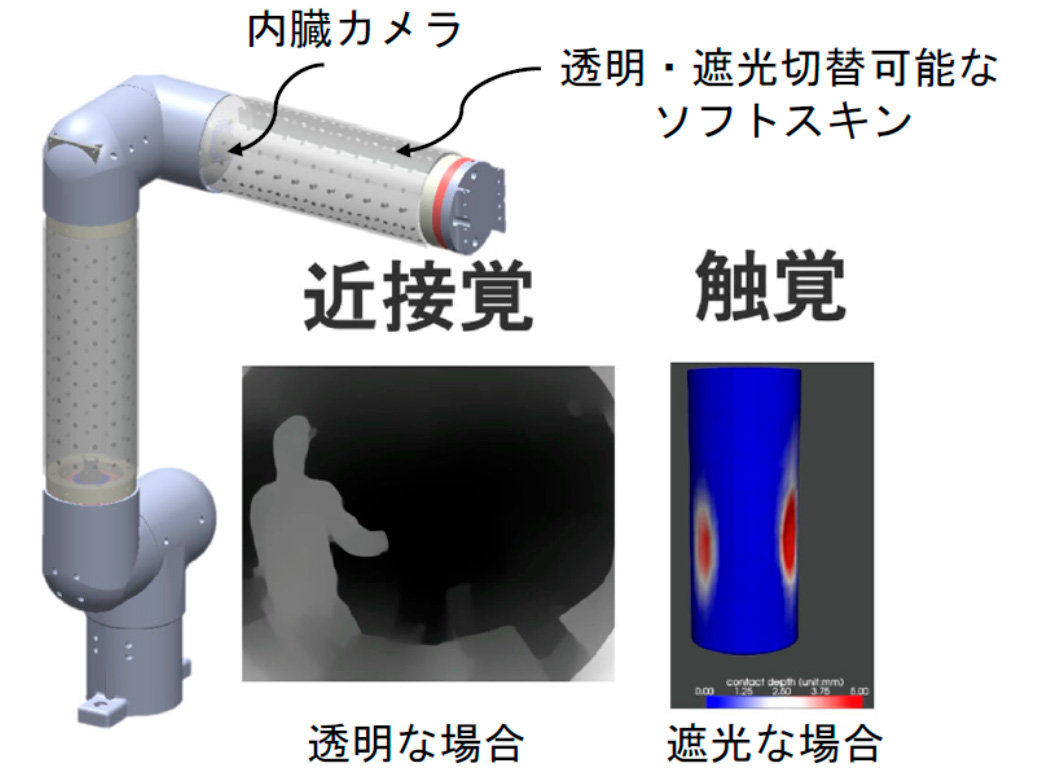
近年、人と同じ空間で安全かつ柔軟に作業できるロボットのニーズが高まっています。これに応えるため、私たちの研究チームは、ソフト機能材料と画像や映像から情報を取得・解析する技術である視覚センシング技術を融合した新しいマルチモーダルソフトセンシング技術「ProTac」(図1)を開発しました。
ProTacは、電圧をかけることで透明・不透明を切り替えられるポリマーディスパースド液晶(PDLC)フィルム注1)と内蔵カメラを組み合わせています。透明時には視界を活用して周囲の物体の近接を検知し、不透明時にはマーカー画像の変化から触覚情報の取得を実現します。また、最新の深層学習ベースの視覚アルゴリズムを用いることで、安定したリアルタイムセンシングが可能です。
図1:ProTacのイメージ図
この技術を用いたソフトロボットリンクは、市販のロボットアームやカスタム製作されたソフトロボットにも取り付け可能で、障害物検知に基づく速度調整や接触時の反射動作など、多様な制御戦略を実現します。ProTacを備えたソフト多機能センシングアームは、人とロボットが密に連携する場面や、従来の剛体リンクでは困難な動作制御において高い性能を示しました。
今後は、この技術を手足や胴体などロボットの各部位に応用し、高機能なマルチモーダルスキンを備えたヒューマノイドロボットの実現が期待されます。また、農業、家庭サービス、介護分野など、幅広い分野での応用も見込まれます。
【研究資金】
本研究は、日本学術振興会 科学研究費補助金 特別研究員奨励費(24KJ1203)、国立研究開発法人 科学技術振興機構(JST)さきがけ(JPMJPR2038)による財政的支援を受けて実施されました。
【論文情報】
| 掲載誌 | IEEE Transactions on Robotics |
| 論文タイトル | Vision-based Proximity and Tactile Sensing for Robot Arms: Design, Perception, and Control |
| 著者 | Quan Khanh Luu, Dinh Quang Nguyen, Nhan Huu Nguyen, Nam Phuong Dam, Van Anh Ho |
| 掲載日 | 2025年7月28日 |
| DOI | 10.1109/TRO.2025.3593087 |
【用語説明】
電圧により透明・不透明を切り替えられる液晶材料。柔軟であり、ディスプレイやスマートウィンドウなどの光の透過を制御する用途に使用される。
令和7年8月22日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/08/22-1.html第5回 金沢大学・北陸先端科学技術大学院大学 共同シンポジウム

| 開催日時 | 令和7年9月29日(月)13:30~17:00 |
| 会 場 | 北陸先端科学技術大学院大学 マテリアルサイエンス系講義棟1階 小ホール ※オンラインにて同時配信(ハイフレックス開催) |
| 対 象 | 両大学の教職員・学生 |
| テーマ | 量子科学 |
| プログラム | 13:30~ オープニング(本シンポジウムの趣旨説明等) 13:35~ 開会挨拶 北陸先端科学技術大学院大学 寺野 稔 学長 13:40~14:20 ≪講演1≫ *講演:30分、質疑応答:10分 講演者:石井 史之 教授(金沢大学 ナノマテリアル研究所) 講演タイトル:『保護された量子』を探る ~計算科学が拓く新物質デザイン~ 14:25~15:05 ≪講演2≫ *講演:30分、質疑応答:10分 講演者:リム 勇仁 教授(本学 次世代デジタル社会基盤研究領域) 講演タイトル: The Past, Present, and Future of the Quantum Internet 15:05~15:25 休憩 15:25~16:05 ≪講演3≫ *講演:30分、質疑応答:10分 講演者:李 睿棟 准教授 (金沢大学 理工研究域電子情報通信学系) 講演タイトル:信頼性の高い分散型量子メタバースの実現に向けて 16:10~16:50 ≪講演4≫ *講演:30分、質疑応答:10分 講演者:安 東秀 准教授 (本学 ナノマテリアル・デバイス研究領域) 講演タイトル:ダイヤモンドNV中心を用いた、量子センシング、量子通信、量子コンピュータへの応用 16:50~ 閉会挨拶 金沢大学 和田 隆志 学長 <*終了後~18:00位まで 量子科学の先端的研究に係るポスター展示および研究者間の歓談時間> |
| 参加申込 | 下記申込み用フォームからお申込みください。 https://forms.cloud.microsoft/r/KkNMfyMe7S ※会場での参加、オンライン参加ともに事前申込みが必要です。 ※オンライン参加の方には、アクセス用URLをご連絡いただいたメールアドレスに後日送信いたします。 |
| 本件 問合せ先 |
研究推進課 学術研究推進係 TEL:0761-51-1907 / 1912 E-mail:suishin@ml.jaist.ac.jp |
次世代プロトン電池へ期待 ―多孔質MXene(マキシン)フィルムが高容量・高速充電を実現―
次世代プロトン電池へ期待
―多孔質MXene(マキシン)フィルムが高容量・高速充電を実現―
ポイント
- 次世代電池「プロトン電池」の鍵となる多孔質MXene (マキシン)フィルムを開発
- 素材の穴の量(細孔密度)を調整することで、従来を大きく上回る電池容量と充電性能を実現
- 長寿命でエコな電池づくりに前進、持続可能なエネルギー社会に貢献
| 北陸先端科学技術大学院大学 物質化学フロンティア研究領域のLinh Chi T. Cao大学院生(博士後期課程)、青木健太郎助教、長尾祐樹教授らは、タイ・タマサート大学シリントン国際工学部(SIIT)およびタイ・国立電子コンピューター技術研究センター (NECTEC)と共同で、再生可能エネルギーの普及や電気自動車の進化に伴い需要が高まる高性能エネルギー貯蔵デバイスの実現に向け、次世代型プロトン電池*1の鍵となる多孔質MXene*2,3アノード(陽極)の開発に成功しました。 本研究で開発された多孔質MXeneフィルムは、MXeneを用いた先行研究の中で最高の性能を発揮し、高容量と超高速充電を両立できることが示されました。この成果は、環境負荷の低い、持続可能な電池技術の発展に大きく貢献すると期待されます。 |
【背景】
現代社会では、電気自動車の普及や携帯端末の進化に伴い、効率の良いエネルギー貯蔵システムの重要性が高まっています。長く市場を牽引してきたリチウムイオン電池は、リチウム資源の限界、環境への影響、安全性といった課題を抱えており、資源の乏しい日本が持続可能な発展を遂げるためには、多様なエネルギー資源の活用と高効率な変換技術の確立が不可欠です。
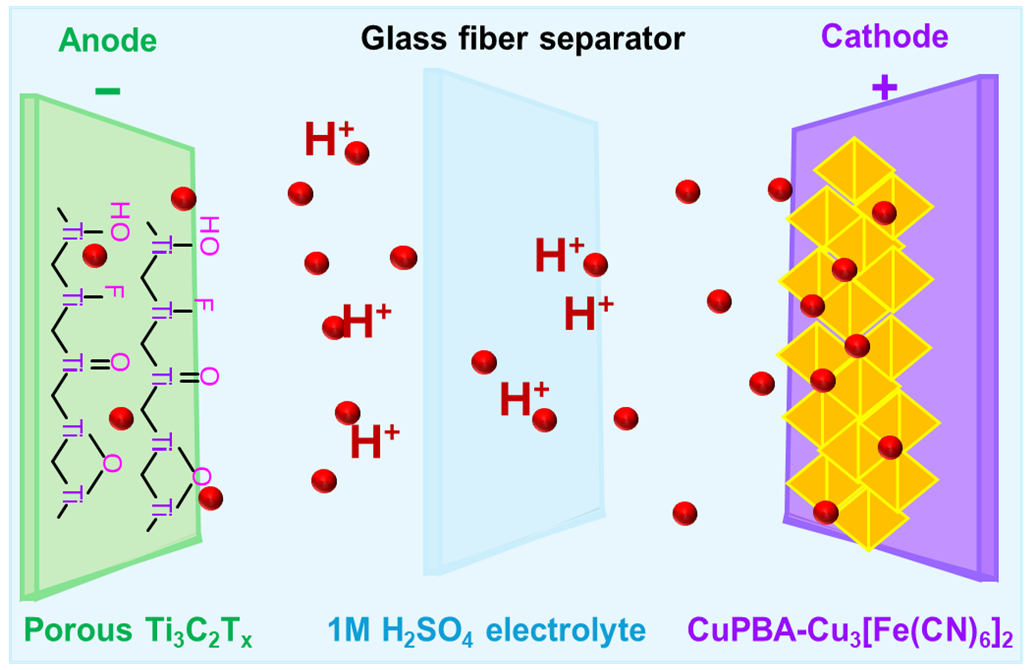
そこで注目されているのが、プロトンと呼ばれる水素原子(H+)を電荷キャリアとして利用するプロトン電池(図1)です。プロトン電池は、水素イオンを使って電気をやりとりする電池で、材料が豊富でエコ、かつ素早く充電できる可能性を秘めており、次世代エネルギー貯蔵の有力候補として注目されています。二次元のナノ材料であるMXeneは、その優れた電気伝導性や高い表面積から、プロトン電池の有望なアノード候補です。しかし、従来のMXeneを薄膜状にしたMXeneフィルムは、MXeneのシート間の相互作用が強く、反応が起こる場所が減少したり、プロトンの輸送が阻害されたりといった課題を抱え、その性能を十分に引き出せていませんでした。
図1 本研究のプロトン電池の模式図
【成果】
本研究では、MXeneアノードの性能向上を目指し、ある物質を鋳型(テンプレート)として利用してその鋳型を犠牲にすることで目的とする物質構造を形成する合成手法である「犠牲テンプレート法」を用いて、細孔密度を系統的に調整した多孔質MXene(P-MX)フィルムを開発しました(図2)。特に、ポリ乳酸(PLA)とMXeneの比率が1:8の条件で合成された「1:8P-MX」アノードは、1 A g−1で104.8 mAh g−1という高容量を達成し、2000サイクル後も96.7%の容量維持率を維持しました(図3)。これは、これまでに報告されたMXeneアノードの中で最高の性能です(図4)。これは、電池を繰り返し使う中で、電解液が素材のすき間にしみ込みやすくなり、さらにプロトンが出入りすることで、素材同士がくっついてしまうのを防ぎ、性能の低下を抑えることができ、反応が起こる場所の増加に繋がったためと考えられます。
さらに、1:8P-MXアノードと銅鉄プルシアンブルー類似体*4(CuPBA)カソード(陰極)を組み合わせた「フルセル」プロトン電池を構築しました。この「フルセル」は、1 mol L−1 H2SO4電解液中で、1 A g−1(17 C)で57.9 mAh g−1、そして10 A g−1(188 C)という高速充電レート*5においても53.3 mAh g−1という高い容量を保持しました。二次電池(充電可能な電池)の充放電におけるエネルギー効率を表す指標である「クーロン効率」は200サイクル後も97%と安定して高い値を示しましたが、容量維持率は65.4%に低下しました。これは、主にCuPBAカソードの電解液中での溶解・分解に起因すると特定され、今後の課題となります。これらの結果は、MXeneアノードにおける細孔設計が、容量とレート性能の両方を向上させる上で極めて重要であることを示しています。
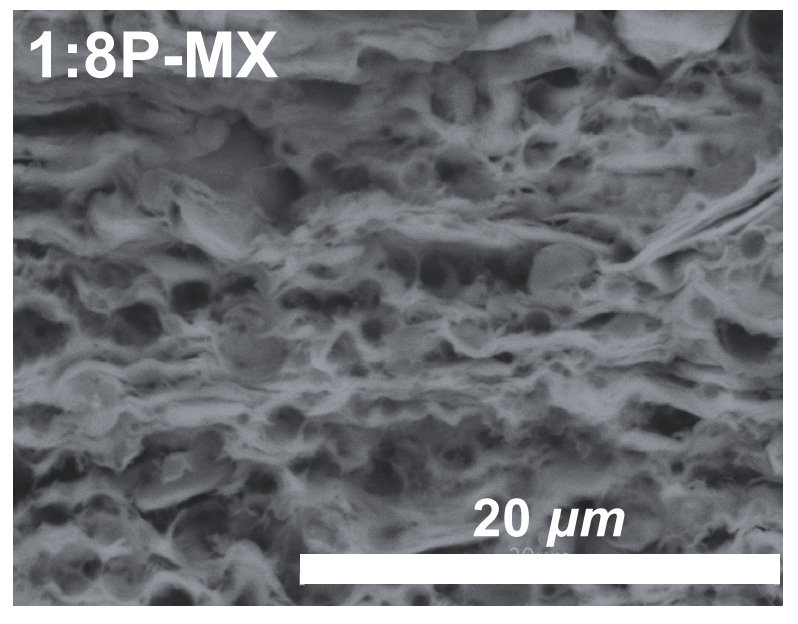
図2 多孔質MXene(P-MX)フィルムの走査電子顕微鏡観察
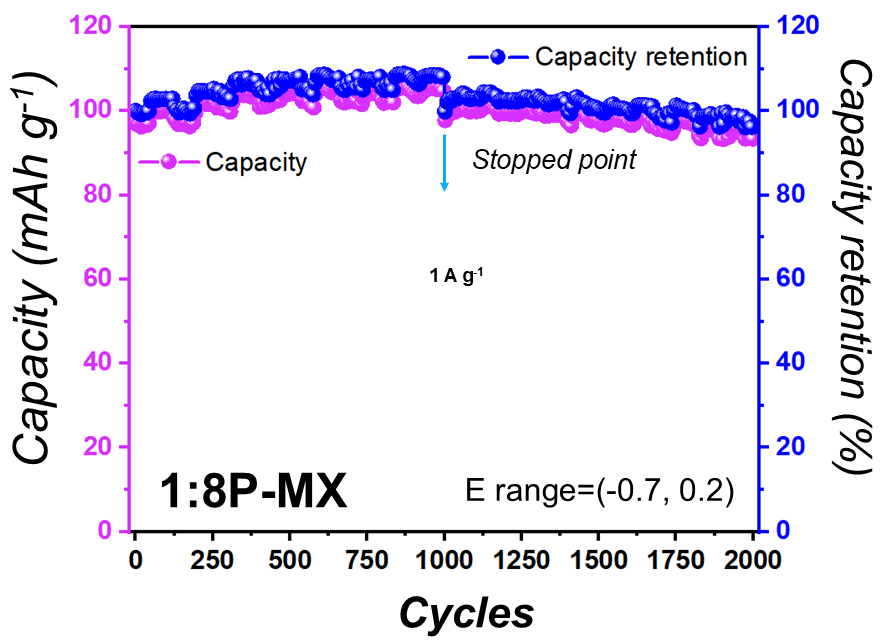
図3 1:8P-MXフィルムのサイクル特性:電流密度1 A g-1、
電位範囲 −0.7~0.2 Vにおける容量(左軸)および容量保持率(右軸)
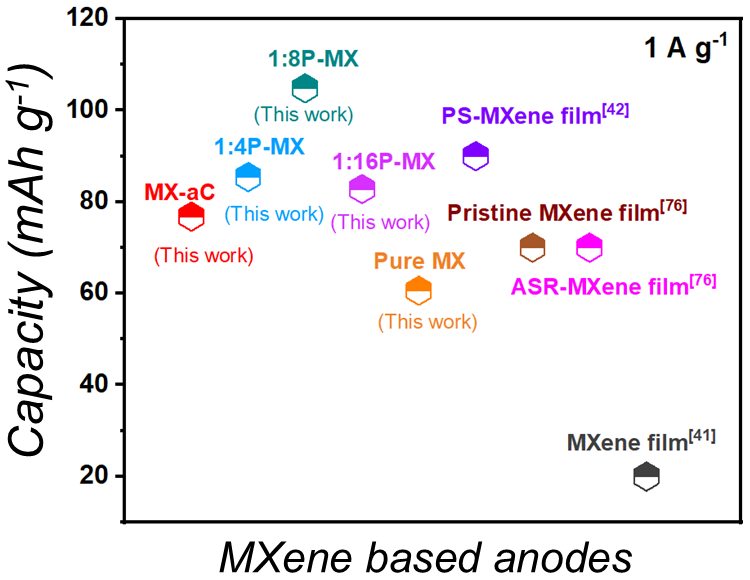
図4 本研究におけるMXeneベースのアノード性能と文献との比較
【社会への還元として期待できる内容、今後の展望】
本研究の成果は、最適化された細孔設計を持つMXeneアノードが、高容量で高速充電が可能な次世代プロトン電池の実現に大きく貢献することを示しています。特に、高濃度酸性電解液や追加の活性材料を用いずに、MXeneのみで高性能を実現した点は、環境への影響を低減し、より持続可能なエネルギー貯蔵システムを開発する上で重要な進歩です。今後は、フルセル電池の長期安定性をさらに向上させるため、CuPBAカソードの電解液中での安定性改善に焦点を当てた研究を進めていきます。これにより、1:8P-MXアノードの優れた性能を最大限に引き出し、プロトン電池の実用化を目指します。
本研究は、国立研究開発法人科学技術振興機構(JST)戦略的創造研究推進事業CREST(グラント番号 JPMJCR21B3)による財政的支援を受けて実施されました。
【論文情報】
| 掲載誌 | Chemical Engineering Journal |
| 論文タイトル | Porosity-controlled MXene anodes for enhanced rate and long cycle life performance in aqueous proton batteries |
| 著者 | Linh Chi T. Cao*, Kentaro Aoki, Shu-Han Hsu, Sakoolkan Boonruang, Yuki Nagao*(筆頭著者も責任著者) |
| 掲載日 | 2025年7月15日 |
| DOI | 10.1016/j.cej.2025.165882 |
【用語説明】
プロトン(水素イオン、H+)を電荷キャリアとして利用する二次電池の一種です。資源の豊富さや高速な電荷移動が特徴です。
二次元遷移金属炭化物の一種で、高い電気伝導性と表面積を持つ有望な新素材です。
微細な穴(細孔)を多数導入したMXene材料で、電解液の浸透性やイオン輸送経路を改善し、電池性能を向上させます。
プロトン電池のカソード材料として研究される化合物群です。
電池の充電および放電速度を示す指標です。1Cは定格容量を1時間で充放電する速度を意味します。
令和7年7月17日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/07/17-1.html学生のXUさんがEM-NANO 2025においてStudent Awardを受賞
学生のXU, Yuanzheさん(博士後期課程3年、ナノマテリアル・デバイス研究領域、大島研究室)が、The 10th International Symposium on Organic and Inorganic Electronic Materials and Related Nanotechnologies(EM-NANO 2025)において、Student Awardを受賞しました。
EM-NANO 2025は、有機・無機エレクトロニクス材料とナノテクノロジーに関する国際シンポジウムで、令和7年6月11日~14日にかけて、福井県福井市のAOSSA(福井県県民ホール)にて開催されました。
同シンポジウムでは、全体講演(Plenary lectures)や招待講演、特別セッションのほか、開催10回目を記念する式典も行われ、エレクトロニクス分野における最新の研究成果について活発な議論が行われました。
※参考:EM-NANO 2025
■受賞年月日
令和7年6月14日
■研究題目、論文タイトル等
Microscopic study of Kanazawa gold leaves
■研究者、著者
Yuanzhe Xu, Satoshi Ichikawa (大阪大学) , Kohei Aso, Hideyuki Murata, Yoshifumi Oshima
■受賞対象となった研究の内容
超薄膜(約100~200 nm)である金沢金箔の組織変化を調査しました。常温で処理されたにもかかわらず、焼鈍や熱間圧延を行わなくても、面心立方(FCC)金属において強い{001}テクスチャが形成されることは、長年の謎でした。今回、EBSDとTEMを用いて、No. 4金箔において[101]方向に沿って幅約100nmのスリップバンドが形成され、{011}-<011>スリップシステムと一致することを発見しました。この滑り系はFCC金属では稀な現象であり、超薄膜による活性化が原因と考えられます。この現象と交差滑り活動が、ハンマー加工中の{001}組織の形成を促進しています。
■受賞にあたって一言
It is a great honor to receive the "Student Award" at EM-NANO2025. I am truly encouraged by this recognition from the committee, which strengthens my determination to further explore the unique deformation mechanisms of Kanazawa gold leaf. As this research is closely tied to the cultural and scientific heritage of Kanazawa and the Hokuriku region, receiving this award at a local conference is especially meaningful to me. This achievement would not have been possible without the invaluable support and guidance of my supervisor, Prof. Yoshifumi Oshima, and the generous assistance of Specially Appointed Professor Satoshi Ichikawa from the Research Center for Ultra-High Voltage Electron Microscopy, Osaka University. I would also like to thank Senior Lecturer Kohei Aso and all the laboratory members for their generous support in both research and daily life.
令和7年7月17日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2025/07/17-2.html令和7年度 第1回 先端国際・社会変革推進本部セミナー「走査トンネル顕微鏡を用いた量子スピン計測及び制御」
下記のとおりセミナーを開催しますので、ご案内します。
| 日 時 | 令和7年6月9日(月)15:30~16:30 |
| 場 所 | マテリアルサイエンス系講義棟 1階 小ホール ※オンライン配信あり ※オンラインでの参加をご希望の方は、下記お問い合わせ先にご連絡ください。 |
| 講演者 | 東京大学物性研究所 土師 将裕 助教 |
| 講演題目 | 走査トンネル顕微鏡を用いた量子スピン計測及び制御 |
| 使用言語 | 日本語 |
| お問合せ先 | 北陸先端科学技術大学院大学 ナノマテリアル・デバイス研究領域 准教授 安 東秀 (E-mail:toshuan |
● 対面参加の場合、参加申込・予約は不要です。直接会場にお越しください。

PufferFace Robot:フグに着想を得たボディ一体型振動推進型ロボット

PufferFace Robot:フグに着想を得たボディ一体型振動推進型ロボット
【ポイント】
- ソフトロボットの設計:PufferFace Robot(PFR)は、フグに着想を得た振動駆動型のソフトロボットで、やわらかく膨らむ外皮により配管の直径の変化に柔軟に対応して進みます。
- 移動性能及び配管内走行能力:3つの移動モード(振動のみ/膨張・収縮のみ/両者の組み合わせ〈メインモード〉)を備えています。自身の外径の1~1.5倍サイズの配管を通過可能で、本体と同サイズの配管内では最大0.5 BL/s(体長/s)の速度で移動可能です。
- 複雑な配管構造での実走行:90度エルボ、T字コネクタ、高曲率セクションなど、複雑な配管構造での走行能力を実験により検証しました。
- 応用可能性:PFRは複雑で狭隘な小口径の配管における点検作業を目的としています。例えば、石油・ガス配管、化学プラント、上下水道管などが挙げられます。また、有害化学物質や高温などの過酷な環境での探査にも有効で、シンプルな制御でも安定した動作が可能です。
- シミュレーションと実験アプローチ:ABAQUSを用いた簡易的な有限要素解析(FEA)によるシミュレーションを通じて、PFRの走行可能性を評価した結果、実験と高い一致性を確認しました。
| 北陸先端科学技術大学院大学(学長・寺野稔、石川県能美市)ナノマテリアル・デバイス研究領域のHo Anh Van教授(IEEE上級会員)が、Linh Viet Nguyen大学院生(博士後期課程)(研究当時)、Khoi Thanh Nguyen大学院生(博士後期課程)らの研究チームを率いて、テキサス大学オースティン校のThe Advanced Robotic Technologies for Surgery Laboratory (ARTS Lab)との共同研究により、複雑な配管内部を自在に前進できる新しいソフトロボット「PufferFace Robot (PFR)」を開発しました。PFRは、フグのように体を膨らませる柔軟な素材と、振動による推進する機構を組み合わせることで、多様な管内形状に対応できる設計となっています。これにより、90度の曲がり角やT字型の分岐、高曲率セクションなど、従来のロボットが苦手としていた区間でも安定した走行を実現しました。本研究では、複雑な計算処理を必要とせず、ロボット本体の構造によって環境への適用を実現する「身体性知能(embodied intelligence)」という考え方も重要視されています。 PFRは、JAISTプレスリリースにて前回紹介した振動駆動型ソフトロボット「Leafbot」(※)の進化形であり、ソフトロボティクス分野の新たな基盤となる可能性を秘めています。 (※)https://www.jaist.ac.jp/whatsnew/press/2025/02/17-1.html |
【研究背景と内容】
柔軟素材を用いたソフトロボットは、その柔軟性と適応性により、従来の硬い素材を用いたロボットでは効果を発揮することが困難な環境でも活躍することができることから、近年大きな注目を集めています。ソフトロボットは、適応的な形態変化を備えており、これは身体知能の一形態として機能し、最小限の計算で環境の変化に応じて反応することが可能です。従来のロボットが複雑な中央制御に依存しているのに対し、適応型ロボットは物理的構造を通じて局所的に調整を行うことで、計算負荷が軽減され、環境応答性が向上します。本研究では、産業、車両、航空宇宙分野で流体やガスの輸送によく使用される配管のような、制約のある可変形状における適応的な移動に焦点を当てました。このような配管は狭く人間が立ち入ることが難しいため、ロボットによる点検のニーズが高まっています。しかし、このような配管は直径、形状、長さが場所によって大きく異なるため、ロボットの設計には大きな課題があります。
これまでにも様々な推進機構(車輪式、歩行式、クローラー式、振動式など)を持つロボットが開発されてきましたが、それらをセンチメートルスケールの配管に適応させるのは困難です。近年の研究では、圧電素子、誘電エラストマー、流体エラストマー、ハイドロゲル、形状記憶合金、電磁アクチュエータなどのスマート素材を用いた生物に着想を得たロボットが開発されています。これらのコンパクトで柔軟な設計は、複雑で狭い配管システムの中を移動するための適応性とエネルギー効率を向上させます。しかし、このような制約のある環境において、機敏で配管のサイズに適応して移動できる信頼性の高い点検ロボットの実現は、依然として課題です。
前述の課題(図1A参照)に対応するため、本研究では新たに「PufferFace Robot (PFR)」という適応型ソフトロボットを開発しました(図1B, D, E参照)。この名称はフグ(pufferfish)から着想を得たことに由来します。PFRは、形態学*1的なスパイクパターンを持つシリコーンゴム製の膨張可能な柔らかい外皮を特徴としており、その設計パラメータは我々の先行研究である「Leafbot」から受け継いだものです。外部の圧縮空気源によって膨張・収縮を操作し、様々な配管形状に適応させることが可能です。PFRの移動メカニズムは、柔らかいスパイクの先端に分布された非対称な摩擦特性に基づいています。その非対称性と振動源を組み合わせることでPFRは前進します。この構成により、PFRの小型構造でも前進移動が可能であると示しました。PFRには3つの移動モードがあります。モード1では、振動モータを作動させて水平な配管を移動します。モード2では、柔らかい外皮の膨張・収縮のみで動作します。モード3は、モード1とモード2を組み合わせたハイブリットモードで、配管内移動における主要なモードです。

| 図1 (A)配管システムにおける形状が制約された様々な空間の例、 (B)様々な空間に適応可能なPufferFace Robotのコンセプト、 (C)フグから着想を得たPFRの設計コンセプト、(D)PFRの膨張状態、(E)PFRの通常状態 |
PFRの設計の詳細を図2に示します。様々な配管サイズに対応するための形態学的なソフトスキンに加え、PFRには暗所での点検作業を支援するためにLEDと小型カメラが搭載されています。今回、設計したPFRには以下の利点があります。
図2 PFRの詳細な設計図 (A) PFRの構成部品 (B) PFRの前面図および側面図
本研究では、「テラダイナミクス(terradynamics)」の手法を採用し、PFRが配管システムの困難な「地形条件」に対して、どれほど効率的かつ効果的に走行できるかを評価しました。これには、鋭角な曲がり(エルボ継手)、高曲率領域、分岐点、水平から垂直への移行、あらゆる方向での配管サイズの変化、T字分岐での操縦が含まれます。これらのシナリオにおけるPFRの性能を図3に示しています。有限要素解析(FEA)に基づいたシミュレーションプラットフォームであるABAQUSのDynamic Explicitモジュールを使用し、PFRを実環境に配置する前に特定の管状環境における通過可能性を評価しました。すべてのテストケースにおいて、シミュレーションの結果は実験結果とよく一致しました。図3(C),(F),(J)は、ABAQUS環境下でシミュレーションした検討シナリオを示しています。

| 図3 実験及びシミュレーション解析による配管システム内の重要な領域を走行するPFRの能力評価 (A, B, G) PFRが実環境及びシミュレーション環境(C,J)においてエルボ(曲がり)部分を走行する様子、 (D, E, F) PFRが実験及びシミュレーションの両ケースにおいて、サイズの異なる空間の移行部を通過する様子、(I) 振動モータの回転方向を変えることで、PFRが方向転換能力を発揮する様子 |
本研究では、ハイブリット推進システムを搭載した生物に着想を得たロボット「PufferFace Robot(PFR)」を提案しました。提案した設計では、狭隘な環境への高い適応性、検査中に気体や流体の流れを妨げない中空機構、複雑な配管内でも最小限の制御で移動可能な適応形態といった利点を有しています。さらにPFRは振動駆動型ソフトロボット、特に小規模配管用途に特化した設計の可能性を広げます。この技術革新は、工業点検だけでなく、医療用途、特に大腸検査のような低侵襲手術にも大きな可能性を秘めています。柔らかく適応性のある構造は、複雑で傷つきやすい生物学的環境を安全に移動することを可能にし、従来の内視鏡ツールに代わる、より安全で効率的な選択肢を提供します。今後は、さらなる小型化と移動性能の向上を目指し、より狭く限られた空間でも自在に動けるように改良を進めていく予定です。
【論文情報】
| 雑誌名 | Science Advances |
| 論文名 | Adaptable cavities exploration: Bioinspired vibration-propelled PufferFace Robot with morphable body. |
| 著者 | Linh Viet Nguyen; Hansoul Kim; Khoi Thanh Nguyen; Farshid Alambeigi, and Van Anh Ho |
| 掲載日 | 2025年4月30日 |
| DOI | 10.1126/sciadv.ads3006 |
【用語説明】
生物の体制や構造を研究する学問
令和7年5月8日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/05/08-1.htmlLiNMC電極を高安定化するホウ素系電解液の開発
LiNMC電極を高安定化するホウ素系電解液の開発
ポイント
- リチウムイオン二次電池の汎用電解液にメシチルジメトキシボラン(MDMB)を加えた3成分系電解液は非常に高いリチウムイオン輸率を示した(エチレンカーボネート(EC):ジエチレンカーボネート(DEC):メシチルジメトキシボラン(MDMB)=1:1:1(v/v/v))。
- ホウ素を含む電解液の使用により正極上にホウ素を含む安定性の高い正極電解質界面(CEI)が形成され、正極の大幅な安定化につながった。
- XPS測定により正極電解質界面(CEI)へのホウ素導入が確認された。ホウ素導入の結果、電荷移動界面抵抗の顕著な低減及び電極反応の活性化エネルギーの低下につながった。
- 電解液中のホウ素成分は系内のHFをB-F結合形成によりトラップしており、これも正極の安定化の要因となっている。
- エチレンカーボネート:ジエチレンカーボネート:メシチルジメトキシボラン=1:1:1(v/v/v)系では溶媒層(solvation sheath)とリチウムイオンとの相互作用がMDMBを含有しない系よりも弱まっていることがMaterials Studioを用いた計算により示唆され、アニオントラップ効果と相まってリチウムイオン輸率を向上させていると考えられる。
| 北陸先端科学技術大学院大学(学長・寺野稔、石川県能美市)物質化学フロンティア研究領域の松見紀佳教授、Liu Zhaohan大学院生(博士後期課程)、Amarshi Patra研究員は、LiNMC正極を安定化できるホウ素系電解液の開発に成功した。 |
【研究背景と内容】
リチウムイオン二次電池1においては、高エネルギー密度の向上を目的として高電圧化が可能なLiNMC系正極が活発に研究されている。LiNMCを安定化させるための様々な添加剤が検討されているが、本研究では電解液設計によりLiNMC系正極を安定化させるアプローチを試み、その有効性を見出した。LiNMCの安定化の手法として、ホウ素系添加剤を活用する試みはこれまで国外グループにおいて検討されていたものの、LiBOBを添加剤とした系では電解液中のHF(フッ酸)の捕捉において有効性が認められたものの、正極電解質界面(CEI)へのホウ素導入は認められていなかった。本研究においては、添加剤と比較して大幅に多い分量の電解液成分として液状のホウ素化合物(MDMB)を用い、HF捕捉のみならず、顕著なCEIへのホウ素導入及び界面抵抗の低減、電極反応の活性化エネルギー低下、それらの結果としての正極の安定性の大幅な向上につながった。
本研究では、エチレンカーボネート:ジエチレンカーボネート:メシチルジメトキシボラン=1:1:0(v/v/v)系(110)、1:1:1(v/v/v)系(111)、1:1:2(v/v/v)系(112)のそれぞれを電解液とした系について検討を行った。
Materials Studioによる計算の結果(図1)、各系におけるリチウムイオンと溶媒層との相互作用のエネルギーは110系においてEint=-156.67 kJ/mol、111系において-147.97 kJ/mol、112系において-149.97 kJ/molとそれぞれ算出された。MDMBを電解液成分として含む系においてはEC/DEC系と比較してリチウムイオンと溶媒層との相互作用が弱まっていることが示唆された。したがって、MDMB含有系においては脱溶媒和の活性化エネルギーの顕著な低下が期待される。
各電解液のリチウムイオン輸率を測定したところ(図1)、MDMBを含む系においては、EC/DEC (110)の0.41に対して0.93 (111)、0.86(112)と大幅に高い値を示し、ホウ素によるアニオントラップ効果に加えて前述のリチウムイオン―溶媒層相互作用の低下が影響を与えていると考えられる。
それぞれの電解液系を用いてLiNMC111を用いて正極型ハーフセルを構築した。サイクリックボルタモグラム2を図2に示す。EC/DEC系(110)においては掃引速度が向上すると電極反応の過電圧が上昇するが、MDMBを含む電解液(111)においては顕著な変化は見られず、高いリチウムイオン輸率により系内の電荷の分極が抑制されている効果によると考えられる。各充放電レートにおける充放電特性を検討したところ、111系電解液において最も優れた特性が観測された(図2)。また、電池セルのインピーダンス測定及びスペクトルの等価回路フィッティングにより、電荷移動界面抵抗の温度依存性に基づいた電荷移動プロセスの活性化エネルギーを算出したところ、111系において最も低い活性化エネルギー(30.5 kJ/mol)を観測した(図2)。結果として、長期サイクル試験においても111系が最も優れた放電容量を示すに至った(図3)。
充放電後の正極のXPS測定を行ったところ、MDMBを含んだ電解液を用いた系においてはいずれもB1sスペクトルにおいて192.5 eV(B-O)、194.0 eV(B-F)のピークが観測され、正極電解質界面(CEI)がホウ素化されていることが確認された(図4)。B-F結合の形成は、導入されたホウ素がHFを捕捉したことを示唆している。電極界面におけるB-Oの導入は、ホウ素―アニオン相互作用により界面における塩解離を促す役割が想定され、電荷移動界面抵抗の低減に寄与していると考えられる。
以上のように、MDMBを電解液成分とすることにより、従来のLiBOB添加剤を用いた正極の安定化手法と比較すると、直接的にCEIにホウ素導入が可能である点において優位性が顕著であり、今後一般化可能な正極安定化プロトコルとしての展開が期待できる。
本成果は、ACS Applied Energy Materials(米国化学会)オンライン版に2025年3月3日(英国時間)に掲載された。
【今後の展開】
本電解液系においてはHFの捕捉、リチウムイオン輸率の向上、界面抵抗の低減、電極反応の活性化エネルギーの低下などの多様なメカニズムにより正極が安定化されている。
今後は、企業との共同研究を通して将来的な社会実装を目指す。
本電解液系と既存の正極安定化剤などとの相乗効果も期待され、更なる研究展開の端緒となると考えられる。

図1 (a) 電解液系110, 111, 112のリチウムイオン輸率 (b) 30-60 ℃ における各系のイオン伝導度の温度依存性(c) 298Kにおける電解質系のモデル(リチウムイオンあり、上段;リチウムイオンなし、下段)

図2 2.8V-4.2 Vにおける各電解液(110,111, 112)を用いた正極型ハーフセル3のサイクリックボルタモグラム (a) 0.1 and (b) 0.2 mV s−1. (c) レート特性の検討結果(d) 異なる電解液系のEa (電荷移動の活性化エネルギー)の比較

図3 各電解液系110系、111系及び112系における長期充放電サイクル特性(正極型ハーフセル、0.5C)

図4 各電解液系111及び112における充放電後の各正極のXPS(B1s)スペクトル
【論文情報】
| 雑誌名 | ACS Applied Energy Materials |
| 題目 | A boron-containing ternary electrolyte for excellent Li-ion transference and stabilization of LiNMC based cells |
| 著者 | Zhaohan Liu, Amarshi Patra and Noriyoshi Matsumi* |
| 掲載日 | 2025年3月3日 |
| DOI | https://doi.org/10.1021/acsaem.4c02806 |
【用語説明】
電解質中のリチウムイオンが電気伝導を担う二次電池。従来型のニッケル水素型二次電池と比較して高電圧、高密度であり、各種ポータブルデバイスや環境対応自動車に適用されている。
電気化学分野における汎用的な測定手法である、電極電位を直線的に掃引し、系内における酸化・還元による応答電流を測定する手法(サイクリックボルタンメトリー)により、得られるプロファイルのこと。
リチウムイオン二次電池の場合には、正極/電解質/Liの構成からなる半電池を意味する。
令和7年3月21日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/03/21-1.htmlLeafbot:振動機構によって駆動される一体型移動ソフトロボット

Leafbot:振動機構によって駆動される一体型移動ソフトロボット
【ポイント】
- ロボット設計: Leafbotと名付けた機構とボディ一体型(モノリシック*1)シート状ロボットは、シリコン製の本体に振動で駆動する運動機構を組み込み開発されました。
- ロコモーションと地形のナビゲーション: Leafbotは、その形態学的な設計により、平坦や斜面、起伏のある地形や障害物がある複雑な地形での効率的な横断(ロコモーション)を可能としました。
- 最高速度: 高周波による振動にて、Leafbotの最高速度は、平坦な道を最高速度5 BL/s(体長毎秒)を達成しました。
- テラダイナミクスの解析: 本研究では、事前に定義した条件下でLeafbotの地形横断能力を評価しました。またLeafbotに組み込まれる運動機構を3パターン設計し、性能比較を行いました。
- 実験による分析:ロコモーションダイナミクスを解析するため、数学モデルを開発し、実験を行いその検証を行いました。
- 本研究の応用: Leafbotは人間が直感的に操作しやすいため、配管などの狭所や複雑な地形を持つ環境下での検査作業の容易化が期待されます。
| 北陸先端科学技術大学院大学(学長:寺野稔、石川県能美市)ナノマテリアル・デバイス研究領域のHo Anh Van教授が、NGUYEN, Linh Viet大学院生(博士後期課程)、NGUYEN, Khoi Thanh 大学院生(博士後期課程)らの研究チームを率い、柔軟素材を用いた機構とボディ一体型のシート状ソフトロボット「Leafbot」を開発しました。Leafbotは足やボディと一体化し、振動により駆動する画期的な機構を持ちます。これにより効率的な移動と地形ナビゲーションを実現しました。また、本研究により、Leafbotは、斜面や険しい路面を含む複雑な地形を横断する能力が示され、配管など狭所で複雑な環境下での応用の可能性があり、ソフトロボティクスの進歩に大きく貢献することが期待されます。 |
【研究の背景と内容】
柔軟素材を用いたソフトロボットは、その柔軟性と適応性により、硬さを持つ剛体ロボットでは適応が困難な環境への適応を可能とするため、大きく注目されています。ソフトロボットにはこのような利点があるにも関わらず、移動ソフトロボットの分野では、複雑な地形での効率的な移動の実現が未だ根強い課題として挙げられます。現在の移動ソフトロボットの設計は、振動を利用した機構を持つ移動ソフトロボットが得意な平坦な地形での移動に重点を置く傾向が見られます。しかし、それらは、斜面や障害物が存在する道、凹凸のある不規則な地形での移動には限界があります。このような限界は、実世界の条件下で、一体として機能する材料特性や動的設計、ロコモーション戦略(ロボットの運動・移動の計画)を統合することの難しさの起因となっています。
Leafbot(図1)は、複雑な地形での効率的なロコモーションという重要な課題に取り組んだ移動ソフトロボットの分野における画期的な成果です。Leafbotの特徴は、柔軟性・耐久性・適応性を兼ね備えたシリコンゴム製のシート型のソフトボディです。このロボットの核となる機構は、移動を行う環境とダイナミクス(動力学)な動きに相互作用する振動により駆動する機構です。
図1: (A)リーフボットのコンセプト、(B)Leafbotの設計
Leafbotの足は、曲率と弾力性を追求した形状をしており、凹凸のある地形と相互作用を最適化するだけでなく、非対称な摩擦力を利用して前進するための推進力を得ることができます。この足の設計は、多様な地形への適応性を持つだけでなく、限定された条件下で急斜面を乗り越えることを可能としています。
本研究チームは、手足の数が異なる3つのパターンのLeafbot(Leafbotの手足の数により3、5、9とナンバリング)を開発し、その動作検証を行いました。その結果、手足の数が多いほど摩擦が増加し、地形への適応性が向上しました。その一方で、手足の数が少なければ、より高速の移動が可能となることが示されました。Leafbotは、平坦な地形(道)において、最高速度5 BL/s(体長/秒)を達成します。さらに、このロボットは半円形の障害物のある道や険しい地形、斜面を移動する際にも卓越した性能を発揮しました。これはLeafbotが困難な環境下に適していることを証明しています。加えて、この研究では、Leafbotにロコモーションダイナミクスを解析する数値モデルを設計し、様々な条件下でのパフォーマンスを理解するための枠組みを提供します。

図2: Leafbot-X5は環境の凹凸をナビゲートし、2次元空間で操縦できる
Leafbotは、移動ソフトロボットが持つ行動能力を平坦な地形から拡大することで、この分野に新たな基準を打ち立てます。この技術は、工業検査や狭所の捜索救助活動、整地されていない農地の監視などへの用途で予想されます。さらに、Leafbotの柔軟でフレキシブルな構造は、平らな場所であれば起伏のある地形でも移動することが可能です。この機能は、2次元空間での操縦性を持たせるため、より多くの動力源(振動源)を搭載することで実現しました。また、改良型Leafbot-X5は、形態学的な手足も同様に、Leafbotが環境の凹凸に適応することを可能にしました(図2)。将来的には、より優れたエネルギー効率を実現するため、設計を改良し、また自律的なナビゲーションのために感覚システムを組み込み、多様な環境で耐久性・性能の担保・向上させるために新素材を追求する予定です。
【論文情報】
| 掲載誌 | IEEE Transactions on Robotics (T-RO) |
| 論文題目 | Terradynamics of Monolithic Soft Robot Driven by Vibration Mechanism |
| 著者 | Linh Viet Nguyen; Khoi Thanh Nguyen; and Van Anh Ho |
| 掲載日 | 2025年1月24日 |
| DOI | 10.1109/TRO.2025.3532499 |
【用語説明】
モノリシックとは、Leafbotのように、ロボットのボディに繋ぎ目がなく一体であり、耐久性・柔軟性・適応性が高められていることを指します。
令和7年2月17日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/02/17-1.html文部科学省マテリアル先端リサーチインフラ(ARIM)第3回公開講座「原子間力顕微鏡の原理と応用」

| 日 時 | 令和7年3月25日(火)13:00~17:00 |
| 場 所 | JAISTナノマテリアルテクノロジーセンター 2F会議室 マテリアルサイエンス系研究棟Ⅳ 4F(M4-45) |
| 受講料 | 5,200 円(税込) |
| 定 員 | 5名(先着順、定員になり次第締め切らせていただきます) |
| 申込み | 以下の情報を記入し、マテリアル先端リサーチインフラ事務局(arim@ml.jaist.ac.jp)までメールでお送りください。 • 氏名(ふりがな) • 勤務先・職名 • 受講の目的 • 本講座に期待すること • 書類送付先 • 電話番号 • メールアドレス 下記URLからもお申し込みいただけます。 URL: https://forms.gle/AbzSsQmPKp4nLPXx5 |
| テーマ | 原子間力顕微鏡の原理と応用 |
| 講 師 | 安 東秀 ナノマテリアル・デバイス研究領域 准教授 伊藤 暢晃 ナノマテリアルテクノロジーセンター 技術専門職員 |
| 概 要 | 近年ではブラックボックスとなってしまったAFM装置の原理を基礎から学びます。 そのうえで、JAISTのAFM設備を用いて標準的な観察と応用観察の実習を行います。 |
穴水町立向洋小学校にてリフレッシュ理科教室に参画

10月4日(金)に、公益社団法人応用物理学会主催の能登半島地震被災地支援出張リフレッシュ理科教室が石川県穴水町立向洋小学校で開催され、本学から、ナノマテリアル・デバイス研究領域の安 東秀准教授が参画し、活動支援にあたりました。
趣旨:
本理科教室は、令和6年1月1日に発生した能登半島地震により被災した穴水町の向洋小学校児童・教員、および保護者の慰問、励ましを第一の目的として、応用物理学会のリフレッシュ理科教室WGが各支部・分科会に参加を募って実施するものです。
併せて、応用物理学会が青少年の理科離れを憂慮し開催している「リフレッシュ理科教室」の理念も念頭に置き、小中学校の先生の理科教育に関するリフレッシュ(物理現象の体験とその原理の理解を通じて理科教育を考える)と、実験工作を自ら体験することによって、参加児童が理科への興味と、自然現象・物理現象への理解を高める機会を提供することを目的としています。
演示実験と工作テーマ:
演示実験:「空気のサイエンスショー」
工作:低学年用(1、2、3年生)
怪力ボックス(パスカルの原理によるエアジャッキ)
高学年用(4、5、6年生)
リサイクルスライダー(磁石利用による鉄、アルミ、プラスチック分別)
最初に、体育館で全生徒38名を対象に空気の圧力を感じるサイエンスショーが実演されました。空気や水の力でさまざまな球や重いものを持ち上げる実験では、ボウリングの球を持ち上げた際に、子どもたちから大きな歓声があがっていました。
その後、低学年16名が空気の力で重いものを持ち上げる「怪力ボックス」を作製しました。高学年21名はフェライト磁石、ネオジウム磁石を用いて、スチール、アルミニウム、プラスチックコイン等の異なる材質のコインを仕分ける「リサイクルスライダー」を作製しました。
最後に修了式が行われ、様々な実験手法が掲載された工作の本、自分の名前入り鉛筆セット等がプレゼントされました。
各演示実験と工作テーマのいずれも、動きや変化がわかりやすいように工夫されており、児童が楽しく、面白く感じられる内容となっていました。今後も応用物理学会のリフレッシュ理科教室WGと連携して参加(主催も含めて)を検討していきます。





令和6年10月21日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2024/10/21-4.htmlソフトロボットハンドを農業の未来に

ソフトロボットハンドを農業の未来に
【ポイント】
- 柔軟性を持つ素材で作られたスキンが回転運動で変形することにより、大きさの異なる農作物を優しく掴んで収穫する汎用ソフトロボットハンド「ROSEハンド」に対し、有限要素解析ソフト「Abaqus」を用いて、把持動作によるスキンの変形に関する非線形解析を行いました。
- この解析により、把持性能や材料特性、幾何学的なパラメータなど、形態学的特徴の関係性を調査しました。
- 農作物の収穫など挑戦的な活用における「ROSEハンド」の可能性を示唆するデモンストレーションを行いました。
| 北陸先端科学技術大学院大学(JAIST)(学長・寺野稔、石川県能美市)ナノマテリアル・デバイス研究領域のHo Anh Van准教授、人間情報学研究領域のNguyen Huu Nhan助教、Nguyen Thanh Khoi大学院生(博士後期課程)らの研究グループは、実環境における様々な種類の農産物を収穫するため、座屈現象を利用した新しいソフトロボットハンドを提案しました。 |
【研究の内容】
近年、産業用ロボットの導入により、ロボットハンドは様々な業界において必要不可欠となっています。特に、農業分野では包装や収穫作業等、幅広く使用されています。農業の発展に伴い、ロボットハンドが対象とする農作物は、それら特有の幾何学的な形状や物理特性に合わせて、多種多様となってきています。その複雑性は、農業特有の技術的要件と相まって、従来のロボットハンドの課題となっています。そのため、形状やサイズ、質感など様々な属性を持つ農作物に適応可能な汎用性の高いロボットハンドの需要が高まっています。
既存の手法において、ロボットハンドは、データに基づくモデルによって生成される複雑な制御や動作計画に依存しています。これには膨大なデータベースと複雑な設計を必要とするため、既存の手法では限界になってきています。そのため、革新的な解決法の開発が急務となっています。以前、我々のグループでは、新たなソフトロボットハンドである「ROSE(ROtation-based Squeezing GrippEr)ハンド」を開発しました(※)。これは農業における実環境下の収穫作業に対し、よりシンプルで効果的な方法を提供するものです。(図1A)。
(※) https://www.jaist.ac.jp/whatsnew/press/2023/07/14-1.html
「ROSEハンド」は、薄く柔らかい弾性体である内側と外側の2枚の層で形成されています。これらの層の間には空間があり、内側の層を回転させることにより層が変形し、「ROSEハンド」本体の内部に「しわ」が生じます。(図1B)。この特有な変形によって、この中央の空間は徐々に収縮し、この空間内にある対象物を優しく掴むことが可能となります。
本研究では、「ROSEハンド」が持つ「掴む」メカニズムを最適化するため、柔らかい素材の複雑な非線形変形をシミュレーションすることができるソフトウェア「Abaqus」を使用しました。非線形性を持つ弾性体は、変形(曲げることや伸びること)しても元に戻る特性を持ちます。その力学的な挙動をモデリングすることは大きな課題となっています。「Abaqus」は、この特性に対処する高度なコンポーネントと制御モジュールを備えており、「ROSEハンド」が持つ複雑性について正確なシミュレーションを行うことができます。
「ROSEハンド」の機能の根幹には、回転動作により発生する「しわ」が生じる「ねじり」の現象があります。「ROSEハンド」の内側の層が外部モータによって「ねじり」の運動を受けると、外側の層と内側の層で「ずれ」が生じます。(図1A)。この「ずれ」は、「ROSEハンド」の縁周辺に不均一な「ひずみ」をもたらし、この「ひずみ」がある点から力が加わると「しわ」の形成に繋がります。この「しわ」によって、「ROSEハンド」の縁が狭まることにより、把持動作が可能となっています。「Abaqus」によるシミュレーションの結果、形態学的な特徴(高さ、直径、厚さ)と把持機能の相関関係が明らかになりました。この発見により、「ROSEハンド」の形状設計を最適化することで、全体的な性能を向上させることができ、これにより改良された「ROSEハンド」で、従来のロボットハンドでは困難であった様々なタスクを検証しました。
本研究では、農業での「ROSEハンド」の実用化が収穫作業における画期的な変化となり得ることを見出しました。農作物のようなデリケートなものを扱うには、従来のロボットハンドでは様々なハードルがありましたが、改良後の「ROSEハンド」は様々な形状や質感に適応可能なため、収穫のような作業に非常に効果的です。
図1. ROSE Design and Wrinkles formation mechanism.
本実験では、「ROSEハンド」でキノコ(図2A)やイチゴ(図2B)のような作物の収穫を行いました。これらのように柔らかい・硬いに関わらず確実に把持することができ、収穫作業の高い成功率を保証することができました。この「ROSEハンド」による収穫機能は、収穫作業の効率を向上させるだけでなく、高齢化に直面している地域での労働力不足にも効果があります。収穫作業を自動化することにより、「ROSEハンド」は農業の持続可能な効率化に貢献し、農業の未来に不可欠なツールとなります。

図2. A) ROSE harvesting mushroom and B) ROSE harvesting strawberry
【今後の展開】
この研究成果がもたらすインパクトは、科学的な研究とその応用の両方から述べることができます。まず、科学的なインパクトは、世界で初めて弾性体の持つ「しわ」の現象を把持機能へ応用したことです。「ROSEハンド」は、通常のロボット設計者が持つ弾性体に現れる「しわ」を引き起こす「たわみ」が望ましくないという一般的な考えを変えることができます。次に、応用面では、「ROSEハンド」の実用性は様々な分野の用途で有望視されています。例えば、「ROSEハンド」の持つ特性により、食品工場などにおける食品のハンドリングや本研究で示した農業の収穫だけでなく、箱詰めのような他の農作業へも利用することが可能です。
本研究では、「ROSEハンド」が農作業の自動化に貢献できることを明らかにしました。また、「ROSEハンド」の活用を他分野に応用することを視野に入れ、日本が直面している労働力不足解消に重要な役割を担うことが期待されます。
本研究成果は、2024年9月23日に、ロボティクス分野の主要ジャーナル「International Journal of Robotics Research」(米国SAGE Publications社)に掲載されました。
【論文情報】
| 雑誌名 | International Journal of Robotics Research |
| 論文題目 | Soft yet secure: Exploring membrane buckling for achieving a versatile grasp with a rotation-driven squeezing gripper |
| 著者 | Khoi Thanh Nguyen, Nhan Huu Nguyen, and Van Anh Ho |
| DOI | 10.1177/02783649241272120 |
令和6年9月26日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2024/09/26-1.html能美市の中学生の皆さんが来学

8月26日(月)、能美市の中学2年生20名の皆さんが施設見学のため来学しました。
中学生の皆さんは、能美市と沖縄県恩納(おんな)村との教育交流パートナー事業に基づき、9月に沖縄科学技術大学院大学(OIST)を訪問されます。その前に地元にある本学(JAIST)について知り、その後にOISTを見学することで両大学の違いや特徴を認識し、結果としてより学習効果が高まることを目的として、JAISTに見学に来られました。
貴重図書室の『解体新書』(杉田玄白著)や情報社会基盤研究センターの大規模並列計算機「KAGAYAKI」、ナノマテリアルテクノロジーセンターを見学した後、ナノマテリアル・デバイス研究領域のホ アン ヴァン准教授の研究室を訪問しました。ホ准教授と研究室の学生がソフトロボットの実演を行い、中学生の皆さんは科学技術を楽しく学ぶことができたようです。

貴重図書室の見学

大規模並列計算機KAGAYAKIの見学

ナノマテリアルテクノロジーセンターの見学
ホ研究室にてソフトロボットの実演
令和6年9月4日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2024/09/04-1.htmlマルチモーダルセンシングを行う触覚センサにより人とロボットの協働をより安全に

マルチモーダルセンシングを行う触覚センサにより
人とロボットの協働をより安全に
【ポイント】
- 柔らかい素材を用いた連続体ロボット用触覚センサの形状復元情報の取得や接触検出を行うDeepLearningモデルを含む統合的なマルチモーダルセンシングプラットフォームを開発しました。
- 知覚情報を用いたロボットアームの動きを決定するアドミタンスベースコントローラにも取り組みました。
- 今後、このプラットフォームに基づいて、柔らかい素材を用いたセンサやロボットへの応用を期待します。
| 北陸先端科学技術大学院大学(JAIST)(学長・寺野稔、石川県能美市)ナノマテリアル・デバイス研究領域のHo Anh Van准教授、Nguyen Tai Tuan大学院生(博士後期課程)、Luu Khanh Quan大学院生(博士後期課程)及びハノイ工業大学(ベトナム)のNguyen Quang Dinh博士の研究チームは、ソフトロボットのための新しい触覚センシングプラットフォームを開発しました。 |
【研究の内容】
本研究では、柔らかいスキンを持つ柔軟なロボットアーム用に設計した"ConTac"と呼ばれる新たなビジョンベースの触覚センシングシステムを開発しました。このシステムは、ロボットアームの位置推定と触覚検出を行うことが出来ます。また、シミュレーション上のデータで訓練した二つのDeepLearningモデルを使用しており、追加の調整を行うことなく実世界のデータで動作することが可能です。このシステムにおいて、二つの異なるロボットモジュールでテストし、その有効性を確認しました。さらに、形状情報と触覚情報を利用する制御戦略を開発し、ロボットアームが衝突に適切に対応できるようにしました。これらにより、このアプローチは、柔軟性の高いロボットの知覚と制御を大幅に改善できる可能性があることを解明しました。
自然界では象の鼻やタコの足など器用な動きをする体が存在します。本研究チームは、これらの自然構造の原理をロボットへ応用することで、高い堅牢性や安全性を備えた連続体ロボット[1]の開発を目指しています。
連続体ロボットは、ほとんどのタスクで必要となる自由度(DOF)よりも多くの自由度を持ち、剛体ロボットと異なる柔軟性や器用さにより、不測の事態へ対応可能です。特に、障害物や外乱などがある環境下で真価を発揮します。しかし、連続体ロボットのように柔軟性の高いロボットは、動作中に複雑な屈曲やカーブを描くため、形状や動きを正確に把握することが課題です。解析により、これらのロボットの運動学・動力学的問題を解決することは可能ですが、複雑なモデリングが必要となります。
解析とは別のアプローチとして、連続体ロボットに組み込まれた柔軟性を持つセンサを用いる方法があります。このセンサは、ロボットの表面に取り付けたり、覆ったりすることが出来ますが、この方法では多くの低解像度センサを必要とし、システムが大型になってしまうという欠点があります。そのため、ロボットやアクチュエータの端に1つのセンサモジュールを使用し、大型化を避ける効率的な解決策が求められていました。ところが、これまでの研究では、ロボットの姿勢推定に重点が置かれており、ロボットの柔軟性に対応するための接触検出は含まれていませんでした。
この問題に取り組むため、本研究チームは柔らかいスキンを持つロボットアームの形状を推定し、接触を検出できるConTacシステムを開発しました(図1)。このシステムの最終的な目標は、連続体ロボットに実装することですが、本研究では、検証のため柔らかいスキンを持つ多関節ロボットアームを用いて"知覚"に焦点を当て、開発を行いました。このシステムには、連続体ロボットのような屈曲動作が可能な骨格、マーカー付きの柔らかいスキン、スキンの変形を撮影するカメラ、スキンの形状と触覚のセンシングモデル及び接触機構が含まれます。また、キャリブレーションを行うことなく、同じ機構や形態を持つあらゆるロボットに適用することが出来ます。さらに、知覚情報を用いてロボットアームの動きを決定するアドミタンスベースコントローラ[2]を開発しました。

図1:ConTac概要。人間がロボットに触れると、ロボットは衝突を避けるために動きを変える。
本研究チームが開発を行ったConTacは、複雑な調整を必要とせず、様々なロボットアームで使用することを目指しています。これを実現するために、シミュレーションデータのみで学習させたDeepLearningモデルを用いました。これらのモデルは実際のロボットへ適応できるため、時間とリソースを短縮できます(図2)。ConTacシステムを搭載した柔軟なロボットアームは、ロボットが障害物の多い環境をナビゲーションし、人間とロボットが安全に作業することが求められるスマート農業やヘルスケアサービスに適しています。また、その柔らかさと柔軟的な機構は、周囲の環境を感知する能力が組み合わさり、植物や患者などへの安全なインタラクションでもあります。
図2:ConTacフレームワーク。センシングモデルの開発には、シミュレーション環境によるトレーニングデータの収集が用いられる。このシステムを搭載したロボットは、人間とロボットのインタラクションに用いられることが期待されている。
【今後の展開】
将来的に、既存のロボットシステムに簡単に組み込むことができる触覚センサの開発が期待されます。この進歩により、新しいセンシングと制御手法が導入されれば、ロボット本来の設計に変更を加えることなく、人間とロボットの安全な相互作用が促進されます。すべてのロボットが触覚を持つ社会となれば、産業と日常生活などに大きな変革をもたらすこととなります。
本研究成果は、2024年7月15日から19日にかけてオランダのデルフトで開催の、ロボティクス研究会におけるトップカンファレンス「ROBOTICS: SCIENCE AND SYSTEMS」で発表されました。
【論文情報】
| 論文題目 | ConTac: Continuum-Emulated Soft Skinned Arm with Vision-based Shape Sensing and Contact-aware Manipulation |
| 発表先 | Robotics: Science and Systems (RSS) |
| 著者 | Tuan Tai Nguyen, Quan Khanh Luu, Dinh Quang Nguyen, and Van Anh Ho* |
| URL | https://enriquecoronadozu.github.io/rssproceedings2024/rss20/p097.pdf |
【用語解説】
令和6年8月6日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2024/08/06-1.html学生のLIUさんがICT/ECT 2024においてThe ICT2024 Outstanding Poster Prizeを受賞
学生のLIU, Ruianさん(博士後期課程3年、サスティナブルイノベーション研究領域、小矢野研究室)が40th International & 20th European Conference on Thermoelectrics (ICT/ECT 2024)においてThe ICT2024 Outstanding Poster Prizeを受賞しました。
国際熱電学会とヨーロッパ熱電学会が後援するICT/ECT 2024は、第40回国際熱電会議と第20回ヨーロッパ熱電会議の合同会議で、AGHクラクフ大学が主催し、ポーランド(クラクフ)にて令和6年6月30日~7月4日にかけて5日間にわたり開催されました。
国際熱電会議(ICT)は、理論とモデリング、物理現象、新素材、測定技術、熱電デバイス、システム、アプリケーションなどあらゆる側面を網羅するトピックを取り扱う、熱電変換技術に関する最も主要な国際会議であり、化学、物理学、材料科学の分野における新しいアイデアや発見、また熱電変換の進歩に寄与する産業およびエネルギー分野における実用的な応用について議論する場を提供しています。
ICT/ECT 2024では約300件のポスター発表があり、その中から優れた発表を行った8件の発表者に対してThe ICT2024 Outstanding Poster Prizeが授与されました。
参考:ICT/ECT2024
ICT/ECT2024参加レポート
■受賞年月日
令和6年7月3日
■研究題目、論文タイトル等
Investigation of lattice anharmonicity in Se-doped Bi2Te3 based on temperature-dependent Raman spectroscopy
■研究者、著者
劉鋭安(LIU, Ruian)、宮田全展、小矢野幹夫
■受賞対象となった研究の内容
SeドープのBi2Te3は、高性能なn型熱電材料としてインターネット光通信レーザーの温度制御などに広く応用されており、その熱電物性はよく調べられている。しかしながらこの機能性材料の低熱伝導率の原因であるフォノン散乱過程に関する実験はほとんど行われていない。私は、Seのドープ量を系統的に変化させたBi2Te3-xSex材料を合成し、ラマン散乱ピークの半値幅の温度依存性の解析から、結晶歪みやSe置換量による格子の非調和振動の変化を詳細に調べた。その結果、3次の非調和項の寄与が支配的である一方、4次以上の非線形的な非調和振動項はほとんど寄与しないことを明らかにした。いままでこの物質の低い熱伝導率は高次の非調和格子振動によるものと考えられていたが、私の実験結果はその考え方に修正をもたらすものであり、より現実的な低熱伝導率の原因の解明につながる重要な成果である。
■受賞にあたって一言
この度は、国際熱電会議よりThe ICT2024 Outstanding Poster Prizeを拝受しましたこと、誠に光栄に存じます。この表彰は私個人の力だけではなく、日々ご指導を賜りました小矢野幹夫教授、宮田全展講師(現産業技術総合研究所)をはじめ、研究室の皆様のお陰です。この場をお借りして心より深く感謝を申し上げます。また、渡航諸費用にご支援を頂いた丸文財団にも厚く御礼申し上げます。


令和6年7月26日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2024/07/26-1.html機械学習を用いた太陽電池用シリコン薄膜堆積条件の新たな最適化手法を開発

| 国立大学法人 国立研究開発法人理化学研究所 |
機械学習を用いた太陽電池用シリコン薄膜堆積条件の
新たな最適化手法を開発
ポイント
- 実用で頻出する制約(膜厚制限や実現不可能な実験条件排除)を考慮した「制約付きベイズ最適化」を開発
- 制約内の実験条件範囲でキャリア再結合抑止能力が最良となる薄膜堆積を少ない実験回数で実現
- 太陽電池製造や薄膜堆積に限らず広く応用可能な手法として期待
| 北陸先端科学技術大学院大学 (JAIST)(学長・寺野稔、石川県能美市)の大橋亮太大学院生(博士前期課程)、Huynh, Thi Cam Tu特任助教(サスティナブルイノベーション研究領域)、東嶺孝一技術専門員(ナノマテリアルテクノロジーセンター)、大平圭介教授(サスティナブルイノベーション研究領域)と、理化学研究所革新知能統合研究センターの沓掛健太朗研究員は、結晶シリコン太陽電池に用いられる薄膜のシリコン堆積条件を最適化する新たな手法を開発した。 |
本研究グループではこれまで、触媒化学気相堆積(Cat-CVD)法*1を用いた太陽電池用薄膜形成に取り組んできた。特に、非晶質シリコン膜と結晶シリコン基板との接合からなるシリコンヘテロ接合太陽電池*2は、低損傷での膜堆積が可能なCat-CVDの優位性が生かせることから、有用な応用先として注力している。この製膜においては、多数の製膜パラメータが存在するため、太陽電池出力を最大化する最適製膜条件の発見には、一般に膨大な実験回数(試行錯誤)を要する。
このような実験条件の最適化問題に対して、「ベイズ最適化」*3と呼ばれる、機械学習を応用した逐次最適化法が、最近よく使用されている。しかし、太陽電池出力の最大化のみを目的とした単純なベイズ最適化では、次の実験条件で得られる膜の厚さを規定する機能は無く、デバイス動作上問題が生じるような厚膜が形成されうる。また、ベイズ最適化によって提示される実験条件が、実現不可能な組み合わせ(例えばガス流量と製膜装置のポンプの排気能力の不整合)となる可能性がある。
本研究では、これらのベイズ最適化における実践的な問題を解決するための、「制約付きベイズ最適化」を開発した。この手法では、未実施の実験条件のうち、製膜装置の仕様上実現が困難な実験条件を機械学習による予測に基づいてあらかじめ排除し、残りの条件の中からキャリア再結合抑止性能を最良化する可能性のある実験条件を提示させるよう工夫した。さらに、一定の製膜時間における予測膜厚を提示させる機能を持たせ、所望の膜厚を得るための製膜時間を逆算できるよう設計した。これらの制約を組み込むことで、製膜装置が実現可能な条件の範囲内でかつ一定の膜厚を有し、キャリア再結合抑止性能を最良化するベイズ最適化の手順を進行させることが可能となった。開発した「制約付きベイズ最適化」を用いることで、わずか8回のサイクルにより最適な製膜条件に到達し、20回のサイクルでベイズ最適化工程が完了した。また、本ベイズ最適化の提示に従って複数の製膜パラメータを広い範囲で変化させた結果、高いキャリア再結合抑止性能の実現には、製膜時の基板温度と原料ガスであるSiH4の流量の組み合わせが重要であることも見出した。
本研究で得られた手法は、太陽電池製造や薄膜堆積に限らず、幅広い分野や試料作製に適用可能な手法として期待される。
「制限付きベイズ最適化」の流れ
【論文情報】
| 雑誌名 | ACS Applied Materials and Interfaces(米国化学会) |
| 題目 | High Passivation Performance of Cat-CVD i‑a-Si:H Derived from Bayesian Optimization with Practical Constraints |
| 著者 | Ryota Ohashi, Kentaro Kutsukake, Huynh Thi Cam Tu, Koichi Higashimine, and Keisuke Ohdaira |
| 掲載日 | 2024年2月8日 |
| DOI | 10.1021/acsami.3c16202 |
【用語説明】
加熱触媒体線により原料ガスを分解し、薄膜を堆積する手法。原料ガスの分解時にイオンが生成されないため、イオンの衝突による結晶シリコン表面への損傷が起こらず、良好な薄膜/基板界面が得られる。
結晶シリコンウェハと非晶質シリコン膜の接合を基本構造とする太陽電池。非晶質シリコン膜により、結晶シリコン表面に存在する結晶欠陥が有効に不活性化され、キャリア再結合が抑えられる結果、汎用の結晶シリコン太陽電池と比べて高い電圧が得られる特長がある。
形状が不明な関数の最大値や最小値を得るための手法の一種。既知である実験条件(入力)とその結果(出力)のデータセットから、未実施の実験条件における結果の予測値を、不確かさ(標準偏差)とともに推定し、不確かさも含めて予測値が最良となる条件で次の実験を行う。その実験で得られた結果を含めて予測値を推定し直す。これを繰り返し、少ない実験回数で最適な実験条件を得る。
令和6年2月19日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2024/02/19-1.html