研究活動の検索
研究概要(研究室ガイド)やプレスリリース・受賞・イベント情報など、マテリアルサイエンスの研究室により公開された情報の中から、興味のある情報をタグや検索機能を使って探すことができます。PufferFace Robot:フグに着想を得たボディ一体型振動推進型ロボット

PufferFace Robot:フグに着想を得たボディ一体型振動推進型ロボット
【ポイント】
- ソフトロボットの設計:PufferFace Robot(PFR)は、フグに着想を得た振動駆動型のソフトロボットで、やわらかく膨らむ外皮により配管の直径の変化に柔軟に対応して進みます。
- 移動性能及び配管内走行能力:3つの移動モード(振動のみ/膨張・収縮のみ/両者の組み合わせ〈メインモード〉)を備えています。自身の外径の1~1.5倍サイズの配管を通過可能で、本体と同サイズの配管内では最大0.5 BL/s(体長/s)の速度で移動可能です。
- 複雑な配管構造での実走行:90度エルボ、T字コネクタ、高曲率セクションなど、複雑な配管構造での走行能力を実験により検証しました。
- 応用可能性:PFRは複雑で狭隘な小口径の配管における点検作業を目的としています。例えば、石油・ガス配管、化学プラント、上下水道管などが挙げられます。また、有害化学物質や高温などの過酷な環境での探査にも有効で、シンプルな制御でも安定した動作が可能です。
- シミュレーションと実験アプローチ:ABAQUSを用いた簡易的な有限要素解析(FEA)によるシミュレーションを通じて、PFRの走行可能性を評価した結果、実験と高い一致性を確認しました。
| 北陸先端科学技術大学院大学(学長・寺野稔、石川県能美市)ナノマテリアル・デバイス研究領域のHo Anh Van教授(IEEE上級会員)が、Linh Viet Nguyen大学院生(博士後期課程)(研究当時)、Khoi Thanh Nguyen大学院生(博士後期課程)らの研究チームを率いて、テキサス大学オースティン校のThe Advanced Robotic Technologies for Surgery Laboratory (ARTS Lab)との共同研究により、複雑な配管内部を自在に前進できる新しいソフトロボット「PufferFace Robot (PFR)」を開発しました。PFRは、フグのように体を膨らませる柔軟な素材と、振動による推進する機構を組み合わせることで、多様な管内形状に対応できる設計となっています。これにより、90度の曲がり角やT字型の分岐、高曲率セクションなど、従来のロボットが苦手としていた区間でも安定した走行を実現しました。本研究では、複雑な計算処理を必要とせず、ロボット本体の構造によって環境への適用を実現する「身体性知能(embodied intelligence)」という考え方も重要視されています。 PFRは、JAISTプレスリリースにて前回紹介した振動駆動型ソフトロボット「Leafbot」(※)の進化形であり、ソフトロボティクス分野の新たな基盤となる可能性を秘めています。 (※)https://www.jaist.ac.jp/whatsnew/press/2025/02/17-1.html |
【研究背景と内容】
柔軟素材を用いたソフトロボットは、その柔軟性と適応性により、従来の硬い素材を用いたロボットでは効果を発揮することが困難な環境でも活躍することができることから、近年大きな注目を集めています。ソフトロボットは、適応的な形態変化を備えており、これは身体知能の一形態として機能し、最小限の計算で環境の変化に応じて反応することが可能です。従来のロボットが複雑な中央制御に依存しているのに対し、適応型ロボットは物理的構造を通じて局所的に調整を行うことで、計算負荷が軽減され、環境応答性が向上します。本研究では、産業、車両、航空宇宙分野で流体やガスの輸送によく使用される配管のような、制約のある可変形状における適応的な移動に焦点を当てました。このような配管は狭く人間が立ち入ることが難しいため、ロボットによる点検のニーズが高まっています。しかし、このような配管は直径、形状、長さが場所によって大きく異なるため、ロボットの設計には大きな課題があります。
これまでにも様々な推進機構(車輪式、歩行式、クローラー式、振動式など)を持つロボットが開発されてきましたが、それらをセンチメートルスケールの配管に適応させるのは困難です。近年の研究では、圧電素子、誘電エラストマー、流体エラストマー、ハイドロゲル、形状記憶合金、電磁アクチュエータなどのスマート素材を用いた生物に着想を得たロボットが開発されています。これらのコンパクトで柔軟な設計は、複雑で狭い配管システムの中を移動するための適応性とエネルギー効率を向上させます。しかし、このような制約のある環境において、機敏で配管のサイズに適応して移動できる信頼性の高い点検ロボットの実現は、依然として課題です。
前述の課題(図1A参照)に対応するため、本研究では新たに「PufferFace Robot (PFR)」という適応型ソフトロボットを開発しました(図1B, D, E参照)。この名称はフグ(pufferfish)から着想を得たことに由来します。PFRは、形態学*1的なスパイクパターンを持つシリコーンゴム製の膨張可能な柔らかい外皮を特徴としており、その設計パラメータは我々の先行研究である「Leafbot」から受け継いだものです。外部の圧縮空気源によって膨張・収縮を操作し、様々な配管形状に適応させることが可能です。PFRの移動メカニズムは、柔らかいスパイクの先端に分布された非対称な摩擦特性に基づいています。その非対称性と振動源を組み合わせることでPFRは前進します。この構成により、PFRの小型構造でも前進移動が可能であると示しました。PFRには3つの移動モードがあります。モード1では、振動モータを作動させて水平な配管を移動します。モード2では、柔らかい外皮の膨張・収縮のみで動作します。モード3は、モード1とモード2を組み合わせたハイブリットモードで、配管内移動における主要なモードです。

| 図1 (A)配管システムにおける形状が制約された様々な空間の例、 (B)様々な空間に適応可能なPufferFace Robotのコンセプト、 (C)フグから着想を得たPFRの設計コンセプト、(D)PFRの膨張状態、(E)PFRの通常状態 |
PFRの設計の詳細を図2に示します。様々な配管サイズに対応するための形態学的なソフトスキンに加え、PFRには暗所での点検作業を支援するためにLEDと小型カメラが搭載されています。今回、設計したPFRには以下の利点があります。
図2 PFRの詳細な設計図 (A) PFRの構成部品 (B) PFRの前面図および側面図
本研究では、「テラダイナミクス(terradynamics)」の手法を採用し、PFRが配管システムの困難な「地形条件」に対して、どれほど効率的かつ効果的に走行できるかを評価しました。これには、鋭角な曲がり(エルボ継手)、高曲率領域、分岐点、水平から垂直への移行、あらゆる方向での配管サイズの変化、T字分岐での操縦が含まれます。これらのシナリオにおけるPFRの性能を図3に示しています。有限要素解析(FEA)に基づいたシミュレーションプラットフォームであるABAQUSのDynamic Explicitモジュールを使用し、PFRを実環境に配置する前に特定の管状環境における通過可能性を評価しました。すべてのテストケースにおいて、シミュレーションの結果は実験結果とよく一致しました。図3(C),(F),(J)は、ABAQUS環境下でシミュレーションした検討シナリオを示しています。

| 図3 実験及びシミュレーション解析による配管システム内の重要な領域を走行するPFRの能力評価 (A, B, G) PFRが実環境及びシミュレーション環境(C,J)においてエルボ(曲がり)部分を走行する様子、 (D, E, F) PFRが実験及びシミュレーションの両ケースにおいて、サイズの異なる空間の移行部を通過する様子、(I) 振動モータの回転方向を変えることで、PFRが方向転換能力を発揮する様子 |
本研究では、ハイブリット推進システムを搭載した生物に着想を得たロボット「PufferFace Robot(PFR)」を提案しました。提案した設計では、狭隘な環境への高い適応性、検査中に気体や流体の流れを妨げない中空機構、複雑な配管内でも最小限の制御で移動可能な適応形態といった利点を有しています。さらにPFRは振動駆動型ソフトロボット、特に小規模配管用途に特化した設計の可能性を広げます。この技術革新は、工業点検だけでなく、医療用途、特に大腸検査のような低侵襲手術にも大きな可能性を秘めています。柔らかく適応性のある構造は、複雑で傷つきやすい生物学的環境を安全に移動することを可能にし、従来の内視鏡ツールに代わる、より安全で効率的な選択肢を提供します。今後は、さらなる小型化と移動性能の向上を目指し、より狭く限られた空間でも自在に動けるように改良を進めていく予定です。
【論文情報】
| 雑誌名 | Science Advances |
| 論文名 | Adaptable cavities exploration: Bioinspired vibration-propelled PufferFace Robot with morphable body. |
| 著者 | Linh Viet Nguyen; Hansoul Kim; Khoi Thanh Nguyen; Farshid Alambeigi, and Van Anh Ho |
| 掲載日 | 2025年4月30日 |
| DOI | 10.1126/sciadv.ads3006 |
【用語説明】
生物の体制や構造を研究する学問
令和7年5月8日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/05/08-1.html材料の柔らかさを活かした次世代ロボットの開発
材料の柔らかさを活かした次世代ロボットの開発
ソフトロボット研究室 Laboratory on Soft Robotics
教授:ホ アン ヴァン(HO Anh-Van)
E-mail:
[研究分野]
ロボティクス
[キーワード]
ソフトロボティクス、柔軟な触覚装置
研究を始めるのに必要な知識・能力
自然の物事と現象を解明することにより、柔軟物を積極的に利用した新機能の機構を開発する本研究室は、分析力や実践力を求め、機能材料の力を借りて技術課題を解決する想像力を重視しています。また、特定の分野・知識を問わずに、ものづくりに興味を持つ学生を歓迎します。
この研究で身につく能力
| ・機械設計、電子回路設計、加工方法 ・プログラミング、制御 ・計算、解析 |
・提案能力 ・コミュニケーション能力、論文作成力 ・グローバルな思考、起業魂 |
【就職先企業・職種】 機械設計会社、電機メーカ、大学等
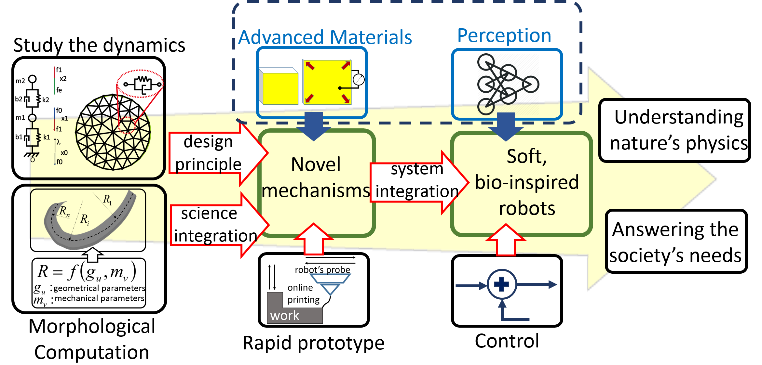
研究内容
概要:
自然界のすべての現象には、何らかの形で必ずダイナミクスが関与しています。このダイナミクスを理解できれば、その現象を生じさせるために、メカニズムがどのように進化してきたかを理解することが可能になります。また、そのメカニズムをロボットの駆動装置または感覚装置に応用することで、新しい機構を創出できると考えられます。本研究室の長期研究計画・内容については以下の図をご参照ください。
内容:
本研究では柔軟物とその形態制御を用いてセンシング装置・アクチュエーター・知能は以下のようなテーマで行われています。
【短期のテーマ】
| ① | 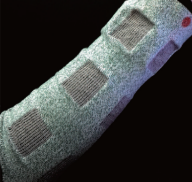 織物のような柔軟な質感を持つ新しい触覚センサの開発、そのマルチ・モーダルな特性を活かすセンシングに基づいた制御方法の開発を積極的に進めています。 織物のような柔軟な質感を持つ新しい触覚センサの開発、そのマルチ・モーダルな特性を活かすセンシングに基づいた制御方法の開発を積極的に進めています。 |
| ② |  遠隔操作システムにおいて、ロボット上の触覚センサによって得られた触感(圧力・摩擦・すべり)をヒトの指先に再現できる装置を開発しています。 遠隔操作システムにおいて、ロボット上の触覚センサによって得られた触感(圧力・摩擦・すべり)をヒトの指先に再現できる装置を開発しています。 |
| ③ | しわのメカニズムにヒントを得た、柔軟性を有するアクチュエータを用いて柔軟物を変形させることによって、同一のセンサのみでも異なるセンシング能力が得られる能動的な触覚センサの開発を目指します。 |
【長期のテーマ】
④ 柔軟物を掴めるソフトロボットハンドの開発
⑤ ラピッドプロトタイプ技術の開発
⑥ 柔軟な思考のあるロボットの開発 等
主な研究業績
- Van Ho et al., IEEE Transactions on Robotics, Vol. 27, No. 3, pp.411-424, 2011
- Van Ho et al., IEEE Sensors Journal, Vol. 13, No. 10, pp. 4065-4080, 2013,
- Van Ho et al., IEEE Robotics and Automation Letter, Vol. 1, Issue 1, pp. 585-592, 2016
使用装置
3Dプリンター、電動直動ステージ、6軸力覚センサ、触覚提示装置、小型NC加工機、高速度カメラ
研究室の指導方針
修士課程、博士課程に関わらず、本研究室に右側の図が示すような「研究活動のサイクル」や「3Cの研究者」を身につけた学生を育成します。そのため、毎週のミーティングで学生の進捗・成長を積極的にフォローします。
研究活動において、各メンバーの発想・アイデアを尊重にして、PDCA(Plan・Do・Check・Action)を通じて具体的な実現方法が見つかるまで指導します。
学生のキャリアパスの選択を全力でサポートします。
[研究室HP] URL:https://www.jaist.ac.jp/ms/labs/vanho/index.html
2025年度JST戦略的創造研究推進事業(CREST・ACT-X)に採択
国立研究開発法人科学技術振興機構(JST)の「戦略的創造研究推進事業(CREST・ACT-X)」において、本学の研究提案からCREST1件、ACT-X1件が採択されました。
採択者および採択課題は以下のとおりです。
【CREST】
研究代表者:ナノマテリアル・デバイス研究領域 ホ アン ヴァン教授
研究課題名:Cross-X: AI 駆動型の触覚・近接センシングおよび適応的コンポーネントによる、多様な形態に対応した身体知能の実現
研究領域:実環境知能システムを実現する基礎理論と基盤技術の創出
研究概要:
本研究は、全身にわたるマルチモーダルセンシングを、適応的形態、事前学習知識、継続学習と統合し、迅速かつ頑健に応答できる物理知能モジュールを構築することを目的とする。さらに、各モジュールにおける局所的なセンシング・駆動から、ロボット全体における統合的な機能発現へと至る「身体知能」の科学的基盤を確立し、次世代ロボティクスの新しいパラダイムを切り拓くことが期待される。
【ACT-X】
研究代表者:コンピューティング科学研究領域 鎌田 斗南助教
研究課題名:連続と離散を横断する計算基盤の確立と実問題への接続
研究領域:次世代 AI を築く数理・情報科学の革新
研究概要:
近年の計算機科学の発展により、実社会の多様な課題を計算機で扱うことが可能となった。しかし、社会課題の多くは本来的に連続的であり、計算機が扱う離散的な近似との間には根本的な差異がある。そのため、問題の困難性と容易性の境界を理解するためには、連続性を計算機上で扱う新たな枠組みが必要である。本研究では、実社会の問題を実数変数の決定問題としてモデル化し、その計算量解析を通じて、体系的な数理基盤を確立する。
CREST:
CRESTは、我が国が直面する重要な課題の克服に向けて、独創的で国際的に高い水準の目的基礎研究を推進し、社会・経済の変革をもたらす科学技術イノベーションに大きく寄与する、新たな科学知識に基づく創造的で卓越した革新的技術のシーズ(新技術シーズ)を創出することを目的とするネットワーク型(チーム型)研究です。
「実環境知能システムを実現する基礎理論と基盤技術の創出」領域では、実環境・物理空間における多様かつ予測困難な状況変化に対して柔軟かつ安全に対応できる知能システム(Physical AI)の構築に向けた基礎学理と基盤技術の創出を目指します。AI とロボティクスやIoT との連携により AI に身体性を付与するなど、知能、機械、数理、制御、計算、通信、神経科学等の学術分野の融合による高度な知能システム構築に資する研究開発を推進します。
▶ 戦略的創造研究推進事業(CREST)
ACT-X:
ACT-Xは、我が国が直面する重要な課題の克服に向けて、優れた若手研究者を発掘し育成することを目的としたネットワーク型(個人型)研究です。
「次世代AIを築く数理・情報科学の革新」領域では、既存のAI技術の限界・困難を克服するため、AI 技術・情報科学および数学・数理科学、その他様々な研究分野の融合・応用による AI技術の高度化や適用範囲の拡大などの、挑戦的な研究課題に取り組む若手研究者を支援することで、新しい価値の創造につながる研究開発を推進します。
▶ 戦略的創造研究推進事業(ACT-X)
令和7年9月29日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/09/29-2.html人と安全に協働できる"ソフトロボットリンク"を開発 触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
人と安全に協働できる"ソフトロボットリンク"を開発
触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
【ポイント】
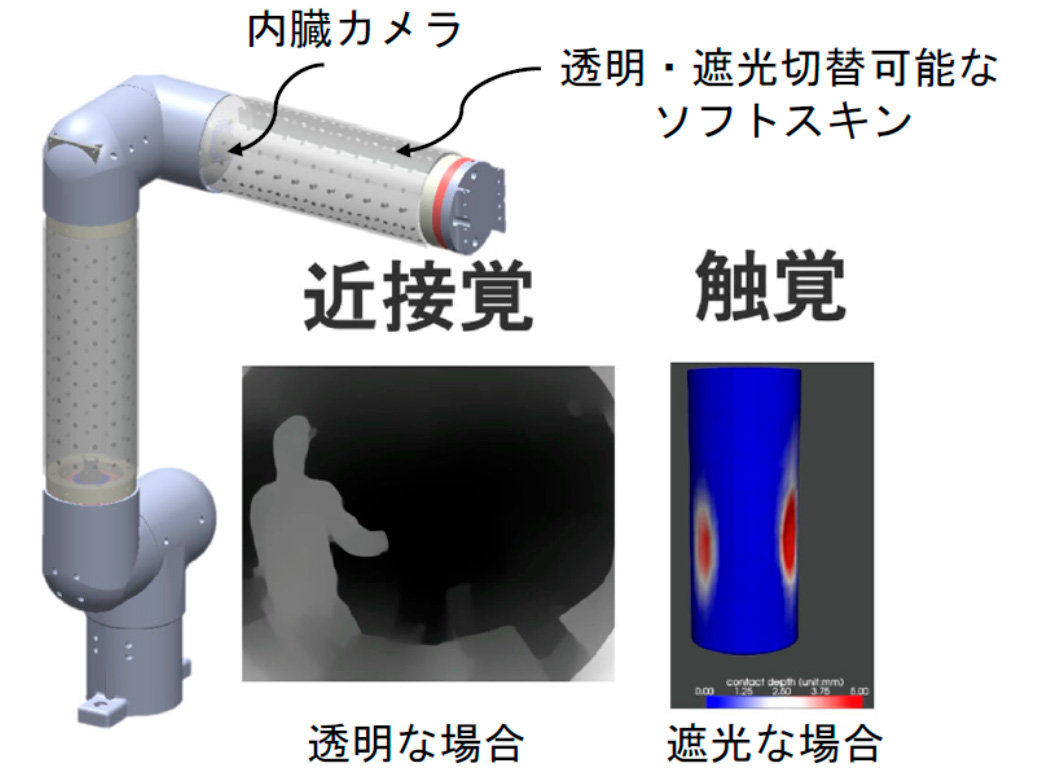
- 透明・不透明を切り替えられるソフトスキンと視覚センサーを用い、近接センシングとスキン変形の解析による触覚センシングを備えたマルチモーダルソフトセンシング技術「ProTac」を開発
- 市販ロボットアームにも取り付け可能
- 従来の剛体リンクでは困難とされる、接触の多い環境下での動作制御が可能
- 農業や介護など、人とロボットが協働する作業への応用に期待
- AI駆動型センシングフュージョン技術
| 北陸先端科学技術大学院大学 ナノマテリアル・デバイス研究領域のクアン・ハン・ルウ研究員、ホ・アン・ヴァン教授らの研究チームは、透明・不透明を電圧により切り替えられるソフト素材と視覚センシング技術を融合し、近接・触覚の両モードを切り替えて検知できるマルチモーダルソフトセンシング技術「ProTac」を世界で初めて開発しました。ProTacを用いたソフトロボットリンクは、周囲の物体を検知する近接センシングとマーカー画像の変化から触覚情報を読み取る触覚センシングを一台で切り替えて行うことができ、人との接触が多い環境で安全に動作制御が可能です。なお、本研究成果は、2025年7月28日にIEEE Transactions on Robotics(T-RO)に掲載されました。 |
【研究概要】
近年、人と同じ空間で安全かつ柔軟に作業できるロボットのニーズが高まっています。これに応えるため、私たちの研究チームは、ソフト機能材料と画像や映像から情報を取得・解析する技術である視覚センシング技術を融合した新しいマルチモーダルソフトセンシング技術「ProTac」(図1)を開発しました。
ProTacは、電圧をかけることで透明・不透明を切り替えられるポリマーディスパースド液晶(PDLC)フィルム注1)と内蔵カメラを組み合わせています。透明時には視界を活用して周囲の物体の近接を検知し、不透明時にはマーカー画像の変化から触覚情報の取得を実現します。また、最新の深層学習ベースの視覚アルゴリズムを用いることで、安定したリアルタイムセンシングが可能です。
図1:ProTacのイメージ図
この技術を用いたソフトロボットリンクは、市販のロボットアームやカスタム製作されたソフトロボットにも取り付け可能で、障害物検知に基づく速度調整や接触時の反射動作など、多様な制御戦略を実現します。ProTacを備えたソフト多機能センシングアームは、人とロボットが密に連携する場面や、従来の剛体リンクでは困難な動作制御において高い性能を示しました。
今後は、この技術を手足や胴体などロボットの各部位に応用し、高機能なマルチモーダルスキンを備えたヒューマノイドロボットの実現が期待されます。また、農業、家庭サービス、介護分野など、幅広い分野での応用も見込まれます。
【研究資金】
本研究は、日本学術振興会 科学研究費補助金 特別研究員奨励費(24KJ1203)、国立研究開発法人 科学技術振興機構(JST)さきがけ(JPMJPR2038)による財政的支援を受けて実施されました。
【論文情報】
| 掲載誌 | IEEE Transactions on Robotics |
| 論文タイトル | Vision-based Proximity and Tactile Sensing for Robot Arms: Design, Perception, and Control |
| 著者 | Quan Khanh Luu, Dinh Quang Nguyen, Nhan Huu Nguyen, Nam Phuong Dam, Van Anh Ho |
| 掲載日 | 2025年7月28日 |
| DOI | 10.1109/TRO.2025.3593087 |
【用語説明】
電圧により透明・不透明を切り替えられる液晶材料。柔軟であり、ディスプレイやスマートウィンドウなどの光の透過を制御する用途に使用される。
令和7年8月22日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/08/22-1.htmlナノマテリアル・デバイス研究領域のHO教授のチームがRoboSoft 2025 Competitionにおいて優勝

ナノマテリアル・デバイス研究領域のHO, Anh Van教授のチームが、8th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2025) Competitionにおいて、Manipulation Challenge 1st placeを獲得しました。
RoboSoft 2025は"Interdisciplinarity and Widening Horizons"をテーマとして、令和7年4月23日~26日にかけて、スイス(ローザンヌ)にて開催されたソフトロボティクスに関する国際会議です。同会議では、研究者、業界の専門家、学生が一堂に会し、最先端の進歩を探求し、様々な分野における知見を共有しました。
同会議と併催で行われたコンペティションは、実際のロボットアプリケーションに焦点を当てたシナリオで構成され、「管内移動」、「デリケートな果物の収穫」、「医療スクリーニングと介入」という3つの具体的な課題が提示されました。HO教授のチームは「デリケートな果物の収穫」の課題に参加し、最も高い得点を獲得しました。
※参考:RoboSoft 2025(Competitions)
■受賞年月日
令和7年4月26日
■研究題目、論文タイトル等
ROSE: A Rotation-Based Soft Gripper Harnessing Morphological Computation for Adaptive and Robust Manipulation
■研究者、著者
Khoi Thanh Nguyen, Nhan Huu Nguyen, and Van Anh Ho
■受賞対象となった研究の内容
このコンペティションでは、ラズベリーのような繊細な果実を収穫する際のソフトロボットグリッパーの有効性を評価します。果実の遮蔽状態の変化、密集、動きによる乱れといった実際の農業現場に見られる課題を再現することで、現実的な収穫条件をシミュレーションしています。
フィールドに即した環境を再現することで、この競技は、実用的な果実収穫において柔軟性(コンプライアンス)と力の制御を効果的に両立できるソフトグリッパーの設計を明らかにします。
この結果は、農業分野におけるソフトロボティクスの重要な役割を強調し、グリッパー技術の現在の進展を示すとともに、自動化かつ繊細な作物収穫システムに対する大きな成長可能性を示唆しています。
提案されている課題は以下の通りです:
・課題1:ロボットが単体のベリーを摘み取る
・課題2:ロボットが密集しているベリーを摘み取る
・課題3:葉に部分的に隠れた単体のベリーを摘み取る
・課題4:葉に部分的に隠れた密集したベリーを摘み取る
・課題5:動いている単体のベリーを摘み取る
当チームのソフトグリッパー「ROSE」は、すべての課題を8分未満で成功裏に完了しました。
■受賞にあたって一言
今回のコンテストは、非常に意義があり、必要な取り組みであると感じました。競技シナリオは、距離制限、葉や枝といった障害物の存在、果実の揺れ、さらには果実の柔らかさまでも再現されており、現実の環境を非常によく模倣していました。そのため、同コンテストは、ベリーの収穫能力を評価するための優れたベンチマークとなります。
また、他のチームの興味深い設計を直接見られる場でもあり、それらの実際の効果を確認できる貴重な機会でもありました。さらに、アイデアを交換したり、将来的な共同研究の可能性について議論したりするための交流の場としても、とても良い機会になりました。
今回、Holabの収穫アームが1位を獲得できたことを非常に嬉しく思っています。この成果により、多くの人に私たちのアームを知ってもらうことができ、JAISTの存在も広く認識されるようになりました。同コンテストを通じて、自分たちの技術の実力を再確認するとともに、現時点での課題も明確になり、今後の改善に向けた大きなヒントを得ることができました。
令和7年5月20日
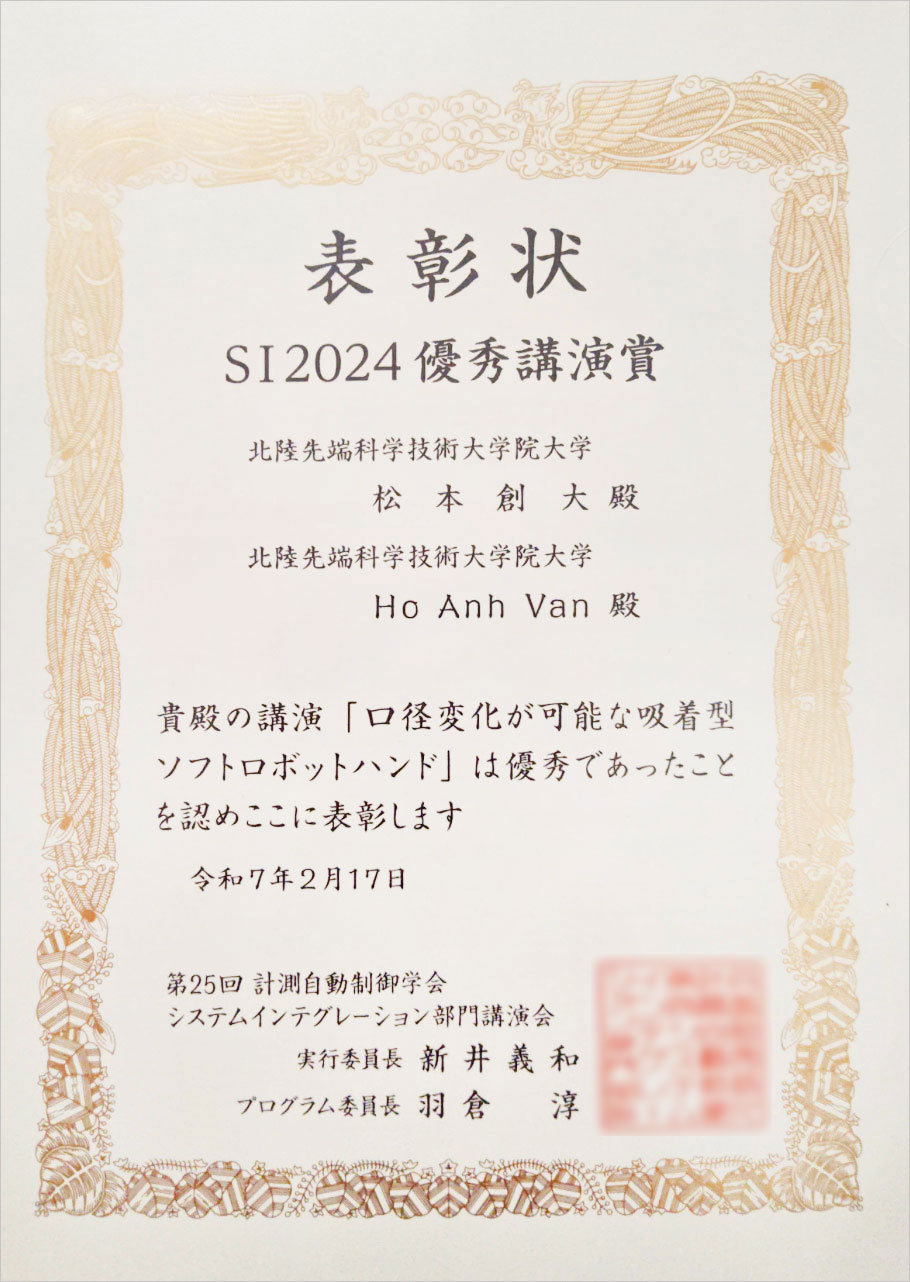
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2025/05/20-1.html学生の松本さんと石須さんがSI2024において優秀講演賞を受賞

学生の松本創大さん(令和7年3月博士前期課程修了、ナノマテリアル・デバイス研究領域、HO研究室)と石須滉大さん(令和7年3月博士前期課程修了、ナノマテリアル・デバイス研究領域、HO研究室)が、第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)において、優秀講演賞を受賞しました。
SI2024は、「サステナブルな社会を目指すシステムインテグレーション」をテーマに、SI部門設立25周年の記念大会として、令和6年12月18日~20日にかけて、岩手県のアイーナいわて県民情報交流センターにて開催されました。
優秀講演賞は、SI部門講演会において発表された全ての発表を対象として審査が行われ、講演会実行委員会によって選出されるものです。
※参考:SI2024
■受賞年月日
令和7年2月17日
【松本創大さん】
■研究題目、論文タイトル等
口径変化が可能な吸着型ソフトロボットハンド
■研究者、著者
松本創大、HO, Anh Van
■受賞対象となった研究の内容
松ぼっくりの形状から着想を得た、吸着口を可変できるソフトロボットハンドを開発した。把持したい物体の形状、重さ、大きさに対して適切な口径を変化させることができるロボットハンドを開発し、吸着力実験と把持実験を通してロボットハンドとしての性能を評価した。
■受賞にあたって一言
自分の研究が評価されて、光栄です。今後ソフトロボットが社会実装されるための1手段になってくれることを願います。
【石須滉大さん】
■研究題目、論文タイトル等
深い接触を許容するビジョンベース触覚センサを用いた回転物体における初期滑り検知
■研究者、著者
石須滉大、Luu Quan、HO, Anh Van
■受賞対象となった研究の内容
ロボットの物体把持のために初期滑り検知が必要。視覚ベース触覚センサを使ってこれまでよりも簡単な方法で初期滑りの特徴を検知した。
■受賞にあたって一言
まずは、本研究を支えてくださったLuu QuanさんとHo, Anh Van教授に深く感謝申し上げます。本研究がソフトロボット学の発展に貢献できれば光栄です。
令和7年5月7日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2025/05/07-1.htmlLeafbot:振動機構によって駆動される一体型移動ソフトロボット

Leafbot:振動機構によって駆動される一体型移動ソフトロボット
【ポイント】
- ロボット設計: Leafbotと名付けた機構とボディ一体型(モノリシック*1)シート状ロボットは、シリコン製の本体に振動で駆動する運動機構を組み込み開発されました。
- ロコモーションと地形のナビゲーション: Leafbotは、その形態学的な設計により、平坦や斜面、起伏のある地形や障害物がある複雑な地形での効率的な横断(ロコモーション)を可能としました。
- 最高速度: 高周波による振動にて、Leafbotの最高速度は、平坦な道を最高速度5 BL/s(体長毎秒)を達成しました。
- テラダイナミクスの解析: 本研究では、事前に定義した条件下でLeafbotの地形横断能力を評価しました。またLeafbotに組み込まれる運動機構を3パターン設計し、性能比較を行いました。
- 実験による分析:ロコモーションダイナミクスを解析するため、数学モデルを開発し、実験を行いその検証を行いました。
- 本研究の応用: Leafbotは人間が直感的に操作しやすいため、配管などの狭所や複雑な地形を持つ環境下での検査作業の容易化が期待されます。
| 北陸先端科学技術大学院大学(学長:寺野稔、石川県能美市)ナノマテリアル・デバイス研究領域のHo Anh Van教授が、NGUYEN, Linh Viet大学院生(博士後期課程)、NGUYEN, Khoi Thanh 大学院生(博士後期課程)らの研究チームを率い、柔軟素材を用いた機構とボディ一体型のシート状ソフトロボット「Leafbot」を開発しました。Leafbotは足やボディと一体化し、振動により駆動する画期的な機構を持ちます。これにより効率的な移動と地形ナビゲーションを実現しました。また、本研究により、Leafbotは、斜面や険しい路面を含む複雑な地形を横断する能力が示され、配管など狭所で複雑な環境下での応用の可能性があり、ソフトロボティクスの進歩に大きく貢献することが期待されます。 |
【研究の背景と内容】
柔軟素材を用いたソフトロボットは、その柔軟性と適応性により、硬さを持つ剛体ロボットでは適応が困難な環境への適応を可能とするため、大きく注目されています。ソフトロボットにはこのような利点があるにも関わらず、移動ソフトロボットの分野では、複雑な地形での効率的な移動の実現が未だ根強い課題として挙げられます。現在の移動ソフトロボットの設計は、振動を利用した機構を持つ移動ソフトロボットが得意な平坦な地形での移動に重点を置く傾向が見られます。しかし、それらは、斜面や障害物が存在する道、凹凸のある不規則な地形での移動には限界があります。このような限界は、実世界の条件下で、一体として機能する材料特性や動的設計、ロコモーション戦略(ロボットの運動・移動の計画)を統合することの難しさの起因となっています。
Leafbot(図1)は、複雑な地形での効率的なロコモーションという重要な課題に取り組んだ移動ソフトロボットの分野における画期的な成果です。Leafbotの特徴は、柔軟性・耐久性・適応性を兼ね備えたシリコンゴム製のシート型のソフトボディです。このロボットの核となる機構は、移動を行う環境とダイナミクス(動力学)な動きに相互作用する振動により駆動する機構です。
図1: (A)リーフボットのコンセプト、(B)Leafbotの設計
Leafbotの足は、曲率と弾力性を追求した形状をしており、凹凸のある地形と相互作用を最適化するだけでなく、非対称な摩擦力を利用して前進するための推進力を得ることができます。この足の設計は、多様な地形への適応性を持つだけでなく、限定された条件下で急斜面を乗り越えることを可能としています。
本研究チームは、手足の数が異なる3つのパターンのLeafbot(Leafbotの手足の数により3、5、9とナンバリング)を開発し、その動作検証を行いました。その結果、手足の数が多いほど摩擦が増加し、地形への適応性が向上しました。その一方で、手足の数が少なければ、より高速の移動が可能となることが示されました。Leafbotは、平坦な地形(道)において、最高速度5 BL/s(体長/秒)を達成します。さらに、このロボットは半円形の障害物のある道や険しい地形、斜面を移動する際にも卓越した性能を発揮しました。これはLeafbotが困難な環境下に適していることを証明しています。加えて、この研究では、Leafbotにロコモーションダイナミクスを解析する数値モデルを設計し、様々な条件下でのパフォーマンスを理解するための枠組みを提供します。

図2: Leafbot-X5は環境の凹凸をナビゲートし、2次元空間で操縦できる
Leafbotは、移動ソフトロボットが持つ行動能力を平坦な地形から拡大することで、この分野に新たな基準を打ち立てます。この技術は、工業検査や狭所の捜索救助活動、整地されていない農地の監視などへの用途で予想されます。さらに、Leafbotの柔軟でフレキシブルな構造は、平らな場所であれば起伏のある地形でも移動することが可能です。この機能は、2次元空間での操縦性を持たせるため、より多くの動力源(振動源)を搭載することで実現しました。また、改良型Leafbot-X5は、形態学的な手足も同様に、Leafbotが環境の凹凸に適応することを可能にしました(図2)。将来的には、より優れたエネルギー効率を実現するため、設計を改良し、また自律的なナビゲーションのために感覚システムを組み込み、多様な環境で耐久性・性能の担保・向上させるために新素材を追求する予定です。
【論文情報】
| 掲載誌 | IEEE Transactions on Robotics (T-RO) |
| 論文題目 | Terradynamics of Monolithic Soft Robot Driven by Vibration Mechanism |
| 著者 | Linh Viet Nguyen; Khoi Thanh Nguyen; and Van Anh Ho |
| 掲載日 | 2025年1月24日 |
| DOI | 10.1109/TRO.2025.3532499 |
【用語説明】
モノリシックとは、Leafbotのように、ロボットのボディに繋ぎ目がなく一体であり、耐久性・柔軟性・適応性が高められていることを指します。
令和7年2月17日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/02/17-1.html学生の友水さんが第2回石川テックプラングランプリにおいてリアルテックファンド賞を受賞

学生の友水豪志さん(博士後期課程2年、ナノマテリアル・デバイス研究領域、HO研究室)が第2回石川テックプラングランプリにおいてリアルテックファンド賞(企業賞)を受賞しました。
石川テックプラングランプリは、情熱をもって石川県から科学技術で世界を変えようとするチームを発掘・育成するための支援プログラム「石川テックプランター」の取組の一つで、県内の大学等から発掘した世界を変えるような研究開発と、県内に拠点を持つ企業等とのマッチングの機会を提供し、各機関が連携して支援することにより新産業創出を図ることを目的として開催されています。
第2回石川テックプラングランプリは、令和6年11月30日に石川ハイテク交流センターにて開催されました。書類選考を通過した9チームのファイナリストによるプレゼンテーションが行われ、審査の結果、最優秀賞および企業賞が決定しました。
※参考:第2回石川テックプラングランプリ
■受賞年月日
令和6年11月30日
■研究題目、論文タイトル等
視覚触覚センサを応用したTactile Bedの開発
■チーム名
SofRobo
■研究者、著者
友水豪志、Van Anh HO
■受賞対象となった研究の内容
近年、人間とロボットのインタラクションを確立するために触覚センサに関する研究、特にVision Based Tactile Sensor(VBTS)の研究開発が多方面で進められている。本研究は、VBTSの原理を応用した新しい高解像度なTactile Bed を実現することであり、その有用性と実現可能性について審査員より評価され受賞に至った。
■受賞にあたって一言
このたび、第2回テックプラングランプリにおいてリアルテックファンド賞を受賞することができ、大変光栄に存じます。本発表内容は、本学の副テーマ研究に基づくものでございます。発表にあたり、日頃よりご指導を賜りましたHO, Anh Van教授、佐藤俊樹准教授、また発表資料作成に際し多大なご協力をいただきました株式会社リバネス様に、心より感謝申し上げます。今後も、副テーマ研究に一層注力し、研究の深化に努めてまいります。引き続きご指導ご支援のほど、よろしくお願い申し上げます。
令和7年1月23日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2025/01/23-1.htmlソフトロボットハンドを農業の未来に

ソフトロボットハンドを農業の未来に
【ポイント】
- 柔軟性を持つ素材で作られたスキンが回転運動で変形することにより、大きさの異なる農作物を優しく掴んで収穫する汎用ソフトロボットハンド「ROSEハンド」に対し、有限要素解析ソフト「Abaqus」を用いて、把持動作によるスキンの変形に関する非線形解析を行いました。
- この解析により、把持性能や材料特性、幾何学的なパラメータなど、形態学的特徴の関係性を調査しました。
- 農作物の収穫など挑戦的な活用における「ROSEハンド」の可能性を示唆するデモンストレーションを行いました。
| 北陸先端科学技術大学院大学(JAIST)(学長・寺野稔、石川県能美市)ナノマテリアル・デバイス研究領域のHo Anh Van准教授、人間情報学研究領域のNguyen Huu Nhan助教、Nguyen Thanh Khoi大学院生(博士後期課程)らの研究グループは、実環境における様々な種類の農産物を収穫するため、座屈現象を利用した新しいソフトロボットハンドを提案しました。 |
【研究の内容】
近年、産業用ロボットの導入により、ロボットハンドは様々な業界において必要不可欠となっています。特に、農業分野では包装や収穫作業等、幅広く使用されています。農業の発展に伴い、ロボットハンドが対象とする農作物は、それら特有の幾何学的な形状や物理特性に合わせて、多種多様となってきています。その複雑性は、農業特有の技術的要件と相まって、従来のロボットハンドの課題となっています。そのため、形状やサイズ、質感など様々な属性を持つ農作物に適応可能な汎用性の高いロボットハンドの需要が高まっています。
既存の手法において、ロボットハンドは、データに基づくモデルによって生成される複雑な制御や動作計画に依存しています。これには膨大なデータベースと複雑な設計を必要とするため、既存の手法では限界になってきています。そのため、革新的な解決法の開発が急務となっています。以前、我々のグループでは、新たなソフトロボットハンドである「ROSE(ROtation-based Squeezing GrippEr)ハンド」を開発しました(※)。これは農業における実環境下の収穫作業に対し、よりシンプルで効果的な方法を提供するものです。(図1A)。
(※) https://www.jaist.ac.jp/whatsnew/press/2023/07/14-1.html
「ROSEハンド」は、薄く柔らかい弾性体である内側と外側の2枚の層で形成されています。これらの層の間には空間があり、内側の層を回転させることにより層が変形し、「ROSEハンド」本体の内部に「しわ」が生じます。(図1B)。この特有な変形によって、この中央の空間は徐々に収縮し、この空間内にある対象物を優しく掴むことが可能となります。
本研究では、「ROSEハンド」が持つ「掴む」メカニズムを最適化するため、柔らかい素材の複雑な非線形変形をシミュレーションすることができるソフトウェア「Abaqus」を使用しました。非線形性を持つ弾性体は、変形(曲げることや伸びること)しても元に戻る特性を持ちます。その力学的な挙動をモデリングすることは大きな課題となっています。「Abaqus」は、この特性に対処する高度なコンポーネントと制御モジュールを備えており、「ROSEハンド」が持つ複雑性について正確なシミュレーションを行うことができます。
「ROSEハンド」の機能の根幹には、回転動作により発生する「しわ」が生じる「ねじり」の現象があります。「ROSEハンド」の内側の層が外部モータによって「ねじり」の運動を受けると、外側の層と内側の層で「ずれ」が生じます。(図1A)。この「ずれ」は、「ROSEハンド」の縁周辺に不均一な「ひずみ」をもたらし、この「ひずみ」がある点から力が加わると「しわ」の形成に繋がります。この「しわ」によって、「ROSEハンド」の縁が狭まることにより、把持動作が可能となっています。「Abaqus」によるシミュレーションの結果、形態学的な特徴(高さ、直径、厚さ)と把持機能の相関関係が明らかになりました。この発見により、「ROSEハンド」の形状設計を最適化することで、全体的な性能を向上させることができ、これにより改良された「ROSEハンド」で、従来のロボットハンドでは困難であった様々なタスクを検証しました。
本研究では、農業での「ROSEハンド」の実用化が収穫作業における画期的な変化となり得ることを見出しました。農作物のようなデリケートなものを扱うには、従来のロボットハンドでは様々なハードルがありましたが、改良後の「ROSEハンド」は様々な形状や質感に適応可能なため、収穫のような作業に非常に効果的です。
図1. ROSE Design and Wrinkles formation mechanism.
本実験では、「ROSEハンド」でキノコ(図2A)やイチゴ(図2B)のような作物の収穫を行いました。これらのように柔らかい・硬いに関わらず確実に把持することができ、収穫作業の高い成功率を保証することができました。この「ROSEハンド」による収穫機能は、収穫作業の効率を向上させるだけでなく、高齢化に直面している地域での労働力不足にも効果があります。収穫作業を自動化することにより、「ROSEハンド」は農業の持続可能な効率化に貢献し、農業の未来に不可欠なツールとなります。

図2. A) ROSE harvesting mushroom and B) ROSE harvesting strawberry
【今後の展開】
この研究成果がもたらすインパクトは、科学的な研究とその応用の両方から述べることができます。まず、科学的なインパクトは、世界で初めて弾性体の持つ「しわ」の現象を把持機能へ応用したことです。「ROSEハンド」は、通常のロボット設計者が持つ弾性体に現れる「しわ」を引き起こす「たわみ」が望ましくないという一般的な考えを変えることができます。次に、応用面では、「ROSEハンド」の実用性は様々な分野の用途で有望視されています。例えば、「ROSEハンド」の持つ特性により、食品工場などにおける食品のハンドリングや本研究で示した農業の収穫だけでなく、箱詰めのような他の農作業へも利用することが可能です。
本研究では、「ROSEハンド」が農作業の自動化に貢献できることを明らかにしました。また、「ROSEハンド」の活用を他分野に応用することを視野に入れ、日本が直面している労働力不足解消に重要な役割を担うことが期待されます。
本研究成果は、2024年9月23日に、ロボティクス分野の主要ジャーナル「International Journal of Robotics Research」(米国SAGE Publications社)に掲載されました。
【論文情報】
| 雑誌名 | International Journal of Robotics Research |
| 論文題目 | Soft yet secure: Exploring membrane buckling for achieving a versatile grasp with a rotation-driven squeezing gripper |
| 著者 | Khoi Thanh Nguyen, Nhan Huu Nguyen, and Van Anh Ho |
| DOI | 10.1177/02783649241272120 |
令和6年9月26日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2024/09/26-1.html能美市の中学生の皆さんが来学

8月26日(月)、能美市の中学2年生20名の皆さんが施設見学のため来学しました。
中学生の皆さんは、能美市と沖縄県恩納(おんな)村との教育交流パートナー事業に基づき、9月に沖縄科学技術大学院大学(OIST)を訪問されます。その前に地元にある本学(JAIST)について知り、その後にOISTを見学することで両大学の違いや特徴を認識し、結果としてより学習効果が高まることを目的として、JAISTに見学に来られました。
貴重図書室の『解体新書』(杉田玄白著)や情報社会基盤研究センターの大規模並列計算機「KAGAYAKI」、ナノマテリアルテクノロジーセンターを見学した後、ナノマテリアル・デバイス研究領域のホ アン ヴァン准教授の研究室を訪問しました。ホ准教授と研究室の学生がソフトロボットの実演を行い、中学生の皆さんは科学技術を楽しく学ぶことができたようです。

貴重図書室の見学

大規模並列計算機KAGAYAKIの見学

ナノマテリアルテクノロジーセンターの見学
ホ研究室にてソフトロボットの実演
令和6年9月4日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2024/09/04-1.htmlマルチモーダルセンシングを行う触覚センサにより人とロボットの協働をより安全に

マルチモーダルセンシングを行う触覚センサにより
人とロボットの協働をより安全に
【ポイント】
- 柔らかい素材を用いた連続体ロボット用触覚センサの形状復元情報の取得や接触検出を行うDeepLearningモデルを含む統合的なマルチモーダルセンシングプラットフォームを開発しました。
- 知覚情報を用いたロボットアームの動きを決定するアドミタンスベースコントローラにも取り組みました。
- 今後、このプラットフォームに基づいて、柔らかい素材を用いたセンサやロボットへの応用を期待します。
| 北陸先端科学技術大学院大学(JAIST)(学長・寺野稔、石川県能美市)ナノマテリアル・デバイス研究領域のHo Anh Van准教授、Nguyen Tai Tuan大学院生(博士後期課程)、Luu Khanh Quan大学院生(博士後期課程)及びハノイ工業大学(ベトナム)のNguyen Quang Dinh博士の研究チームは、ソフトロボットのための新しい触覚センシングプラットフォームを開発しました。 |
【研究の内容】
本研究では、柔らかいスキンを持つ柔軟なロボットアーム用に設計した"ConTac"と呼ばれる新たなビジョンベースの触覚センシングシステムを開発しました。このシステムは、ロボットアームの位置推定と触覚検出を行うことが出来ます。また、シミュレーション上のデータで訓練した二つのDeepLearningモデルを使用しており、追加の調整を行うことなく実世界のデータで動作することが可能です。このシステムにおいて、二つの異なるロボットモジュールでテストし、その有効性を確認しました。さらに、形状情報と触覚情報を利用する制御戦略を開発し、ロボットアームが衝突に適切に対応できるようにしました。これらにより、このアプローチは、柔軟性の高いロボットの知覚と制御を大幅に改善できる可能性があることを解明しました。
自然界では象の鼻やタコの足など器用な動きをする体が存在します。本研究チームは、これらの自然構造の原理をロボットへ応用することで、高い堅牢性や安全性を備えた連続体ロボット[1]の開発を目指しています。
連続体ロボットは、ほとんどのタスクで必要となる自由度(DOF)よりも多くの自由度を持ち、剛体ロボットと異なる柔軟性や器用さにより、不測の事態へ対応可能です。特に、障害物や外乱などがある環境下で真価を発揮します。しかし、連続体ロボットのように柔軟性の高いロボットは、動作中に複雑な屈曲やカーブを描くため、形状や動きを正確に把握することが課題です。解析により、これらのロボットの運動学・動力学的問題を解決することは可能ですが、複雑なモデリングが必要となります。
解析とは別のアプローチとして、連続体ロボットに組み込まれた柔軟性を持つセンサを用いる方法があります。このセンサは、ロボットの表面に取り付けたり、覆ったりすることが出来ますが、この方法では多くの低解像度センサを必要とし、システムが大型になってしまうという欠点があります。そのため、ロボットやアクチュエータの端に1つのセンサモジュールを使用し、大型化を避ける効率的な解決策が求められていました。ところが、これまでの研究では、ロボットの姿勢推定に重点が置かれており、ロボットの柔軟性に対応するための接触検出は含まれていませんでした。
この問題に取り組むため、本研究チームは柔らかいスキンを持つロボットアームの形状を推定し、接触を検出できるConTacシステムを開発しました(図1)。このシステムの最終的な目標は、連続体ロボットに実装することですが、本研究では、検証のため柔らかいスキンを持つ多関節ロボットアームを用いて"知覚"に焦点を当て、開発を行いました。このシステムには、連続体ロボットのような屈曲動作が可能な骨格、マーカー付きの柔らかいスキン、スキンの変形を撮影するカメラ、スキンの形状と触覚のセンシングモデル及び接触機構が含まれます。また、キャリブレーションを行うことなく、同じ機構や形態を持つあらゆるロボットに適用することが出来ます。さらに、知覚情報を用いてロボットアームの動きを決定するアドミタンスベースコントローラ[2]を開発しました。

図1:ConTac概要。人間がロボットに触れると、ロボットは衝突を避けるために動きを変える。
本研究チームが開発を行ったConTacは、複雑な調整を必要とせず、様々なロボットアームで使用することを目指しています。これを実現するために、シミュレーションデータのみで学習させたDeepLearningモデルを用いました。これらのモデルは実際のロボットへ適応できるため、時間とリソースを短縮できます(図2)。ConTacシステムを搭載した柔軟なロボットアームは、ロボットが障害物の多い環境をナビゲーションし、人間とロボットが安全に作業することが求められるスマート農業やヘルスケアサービスに適しています。また、その柔らかさと柔軟的な機構は、周囲の環境を感知する能力が組み合わさり、植物や患者などへの安全なインタラクションでもあります。
図2:ConTacフレームワーク。センシングモデルの開発には、シミュレーション環境によるトレーニングデータの収集が用いられる。このシステムを搭載したロボットは、人間とロボットのインタラクションに用いられることが期待されている。
【今後の展開】
将来的に、既存のロボットシステムに簡単に組み込むことができる触覚センサの開発が期待されます。この進歩により、新しいセンシングと制御手法が導入されれば、ロボット本来の設計に変更を加えることなく、人間とロボットの安全な相互作用が促進されます。すべてのロボットが触覚を持つ社会となれば、産業と日常生活などに大きな変革をもたらすこととなります。
本研究成果は、2024年7月15日から19日にかけてオランダのデルフトで開催の、ロボティクス研究会におけるトップカンファレンス「ROBOTICS: SCIENCE AND SYSTEMS」で発表されました。
【論文情報】
| 論文題目 | ConTac: Continuum-Emulated Soft Skinned Arm with Vision-based Shape Sensing and Contact-aware Manipulation |
| 発表先 | Robotics: Science and Systems (RSS) |
| 著者 | Tuan Tai Nguyen, Quan Khanh Luu, Dinh Quang Nguyen, and Van Anh Ho* |
| URL | https://enriquecoronadozu.github.io/rssproceedings2024/rss20/p097.pdf |
【用語解説】
令和6年8月6日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2024/08/06-1.html学生のLEさんがSII2024にてBest Student Paper Awardを受賞

学生のLE, Nhat Dinh Minhさん(博士後期課程3年、人間情報学研究領域、ホ研究室)がThe 2024 16th IEEE/SICE International Symposium on System Integration(SII2024)においてBest Student Paper Awardを受賞しました。
SII2024は、VNU工科大学が主催し、1月8日~11日にかけてベトナム(ハロン)にて開催された国際会議です。IEEE/SICE SIIはシステムインテグレーションに関する最先端技術と将来の展望を提示する主要な会議で、産業界の専門家、研究者、学者がフロンティア技術、画期的で革新的なソリューション、アプリケーションに関するアイデアや経験を共有することを目的としています。システムインテグレーションはキーテクノロジーのひとつであり、新世紀における産業システムや社会システムの問題を解決するためには、ハードウェアとソフトウェアの統合が特に重要になります。SII2024では、システムインテグレーションの新しい研究と産業応用に焦点を当て、その有効性を向上させるためのアプローチと方法論について議論が交わされました。
Best Student Paper Awardは、同会議において最も優れた研究成果を発表した学生に授与されるものです。
※参考:SII2024
■受賞年月日
令和6年1月10日
■研究題目
Distributed Cascade Force Control of Soft-Tactile-Based Multi-Robot System for Object Transportation
■研究者、著者
Duy Anh Nguyen(University of Prince Edward Island)、Nhat Minh Dinh Le、Nhan Huu Nguyen、Pham Duy Hung(University of Engineering and Technology (VNU-UET))、Van Anh Ho、Trung Dung Ngo(University of Prince Edward Island)
■受賞対象となった研究の内容
In this paper, we present a distributed cascade force control system (DCFC) for multiple robots with the aim of pushing a rigid object towards a desired moving target without their inter-robot communication. These mobile robots are equipped with 360-degree vision-based soft tactile sensors utilized to determine contact location and resultant impact force. By investigating the dynamics of moving rigid objects on the flat, we proposed a distributed cascade control. The inner loop control incorporates contact force and positioning, ensuring the robots' pushing contact and applying the desired force to the object. The outer loop control coordinates the robots to push the object in a desired direction without inter-robot communication, regardless of unknown object mass and friction uncertainty. The stability and convergence of the control system are verified using the Lyapunov stability theory. We also conducted simulation and real-world experiments to validate the performance of the proposed control method, and the experimental results showcase the successful coordination of multiple robots in pushing an object towards a moving desired direction.
■受賞にあたって一言
I am incredibly grateful to every author who contributed to this project especially Lecturer Pham Duy Hung, Assistant Professor Nguyen Huu Nhan, Professor Trung Dung Ngo and Associate Professor Ho Anh Van. Without your dedication, expertise, and unwavering support, receiving this best student paper award at SII2024 would not have been possible. Besides, I extend my huge thanks to Nguyen Anh Duy for going above and beyond! His hard work led to incredible results, and his presentation at SII2024 was simply amazing. I'm particularly thankful to the JAIST Off-Campus Research Grant Program for providing me with the invaluable opportunity to conduct research in Canada. This experience significantly enhanced my abilities and boosted more productive collaboration within our team. Together, we were able to achieve remarkable progress, and this award serves as a powerful proof of our efforts. Looking ahead, I'm excited to continue building upon this momentum and explore new research avenues alongside my talented colleagues and greatest professors.
令和6年2月27日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2024/02/27-1.html人間情報学研究領域のホ准教授らが国際会議RSS2023においてBest System Paper Awardの Finalistに選出

人間情報学研究領域のホ アン ヴァン准教授、修了生のBUI, Son Tienさん(令和5年3月博士後期課程修了、ホ研究室)および河野 晋也さん(令和5年3月博士前期課程修了、ホ研究室)が国際会議Robotics : Science and Systems(RSS)2023において発表した論文が、Best System Paper AwardのFinalistに選出されました。
RSSは、ロボティクス分野で権威あるトップカンファレンスの一つです。第19回となった今回は、令和5年7月10日から14日にかけて、韓国テグにて開催されました。
*参考:RSS2023
■年月日
令和5年7月14日
■研究題目、論文タイトル等
ROSE: Rotation-based Squeezing Robotic Gripper toward Universal Handling of Objects
■研究者、著者
Son Tien Bui, Shinya Kawano, Van Anh Ho
■対象となった研究の内容
本研究で提案したバラの花の機能と美しさに着想を得たROSE(ROtation-based-Squeezing grippEr)ロボットハンド(以下、ROSEロボットハンド)は、大面積接触と閉じた構造を特徴とし、より優しい把持接触と汎用的な把持性能を実現した。具体的に、ROSEロボットハンドでは、柔らかい素材であるソフトマテリアルを使用したスキンを作成し、樹脂製の軸部分の回転により動作するシンプルな機構を提案した。これにより、把持物を傷つけず、かつ制御の複雑さを軽減することに成功した。また、少量のソフトマテリアルと樹脂素材を用いた回転部分を3Dプリントにより形成することで安価に製作できる。さらに、ROSEロボットハンドの空間を閉じようとする動作により、単純な把持のみならず掴む動作も行えるため、把持対象が限定されない。
■選出にあたって一言
この度、RSSのようなトップ国際会議にBest System Paperファイナリストとして選ばれたのは、大変光栄です。この研究に貢献してきたHo研究室の修了生や現在のメンバーなどに感謝いたします。
令和5年8月3日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2023/08/03-1.html"ROSE"ハンド:バラの花から着想を得た包み込むように掴むロボットハンドを開発

"ROSE"ハンド:バラの花から着想を得た包み込むように掴むロボットハンドを開発
ポイント
- バラの花から着想を得て、物を包み込むように掴むソフトロボットハンドを開発した。
- ロボットハンドとして十分な把持力を持ちながら、素材にソフトマテリアルを使用することで把持物やその周辺を傷つけずに掴むことが可能である。
- ロボットハンド制御の複雑性を軽減させたシンプルな構造かつ優れた耐久力を持っており、多様な用途に使用できるため、幅広い分野での社会実装が期待される。
| 北陸先端科学技術大学院大学(学長・寺野稔、石川県能美市)人間情報学研究領域のホ アン ヴァン(Ho Anh Van)准教授は、バラの花から着想を得て、物を包み込むように掴み、かつ汎用性に優れたソフトロボットハンドを開発した。開発したロボットは、簡素化された制御機能と優れた耐久性を有しており、今後、農業分野における収穫作業代替ロボットとしての普及だけでなく、幅広い分野への応用が期待される。 |
【研究の背景と目的】
昨今、様々な分野でソフトハンドロボットが導入されている。特に、農業分野においては、ロボットハンドによる収穫作業の自動化が進められており、「農作物を傷つけずに収穫する」ための有用な手段として注目されている。
農業用のロボットハンドとしては、デリケートな農作物を把持することが可能なものがすでに開発されているが、イチゴやモモといった特にデリケートな農作物を対象とした把持の結果は芳しくない。また、ロボットハンドの普及が進まない原因の一つとして、ロボットが高価であることが挙げられる。ソフトロボットを含めたこれまでのロボットハンドは、対象物に特化した専用のロボットハンドとして開発されており、それに加えて、高度なセンシングや制御を必要としている。そのため、開発コストが高まることでロボットハンドの価格が上昇し、導入コストに影響していると考えられる。
本研究では、これらの課題を解決するため、"低価格であり、収穫物を傷つけない優しい把持が可能で、十分な力を持つロボットハンド"をコンセプトに、新しい農業用ロボットハンドの開発を目指した。さらに、農業だけでなく他分野での活用を視野に入れた、対象物を選ばず、また把持物とその周辺を傷つけずに把持することができるロボットハンドの実現を目指した。
【研究の内容】
■アイデア:
設計概念として、1)収穫物を傷つけないためにソフトマテリアルを用いる、2)ロボットハンドの制御を簡素化する、3)製作コストを低くする、4)対象物を選ばず汎用性に優れた把持を実現する、ことを目指した。以上を踏まえ、本研究で提案したバラの花の機能と美しさに着想を得たROSE(ROtation-based-Squeezing grippEr)ロボットハンド(以下、ROSEロボットハンド)は、大面積接触と閉じた構造を特徴とし、より優しい把持接触と汎用的な把持性能を実現した(図1、2)。
具体的に、ROSEロボットハンドでは、柔らかい素材であるソフトマテリアルを使用したスキンを作成し、樹脂製の軸部分の回転により動作するシンプルな機構を提案した。これにより、把持物を傷つけず、かつ制御の複雑さを軽減することに成功した。また、少量のソフトマテリアルと樹脂素材を用いた回転部分を3Dプリントにより形成することで安価に製作できる。さらに、ROSEロボットハンドの空間を閉じようとする動作により、単純な把持のみならず掴む動作も行えるため、把持対象が限定されない。

図1:開発したROSEロボットハンド
図2:設計概念
■特徴:
図2のように、ROSEロボットハンドの先端は半球の頂点を押し込み、窪ませた様な形状をしている。この窪みの底を軸とし、外側のスキンとこの軸を逆方向に回転させることでスキンにねじれを発生させ、それが窪んだ空間を閉じるように動作し把持を可能としている。従来の人の指を模倣したようなソフトロボットハンドでは適切な姿勢制御が必要であるが、ROSEロボットハンドは大面積接触と閉じた構造により、様々な対象物の把持を可能としている。特に、従来のロボットハンドでは困難であった油に浸した対象物の把持が可能であることが実験で示された(図3)。

図3:オリーブオイルタンクから浸したゆで卵の把持の様子
■動作ビデオ(YouTubeへリンク):https://youtu.be/E1wAI09LaoY
■他の技術との差:
前述したように、農業用ロボットハンドの課題の一つとして、収穫物を傷つけず、かつ潰さずに収穫することが挙げられる。この課題を解決するために様々な農業用ロボットハンドが開発されているが、特定の農作物の収穫に限られたものが多く、高価な導入コストという問題までは完全に解決できていない。
一方、このROSEロボットハンドは、対象物を選ばない把持が特徴である。通常のソフトロボットハンドは制御が難しいが、ROSEロボットハンドはそのシンプルな機構によりこの種の課題を解決した。例えば、農業用ロボットハンドでは、主に人の指を模したロボットハンドが多く使用されるが、把持の際に対象物の形状や柔らかさなどによって制御を工夫しなければならない。ROSEロボットハンドは、空間を閉じる動作により包み込むような把持を行うため、対象物によって制御を変える必要がなく、対象物を選ばずに把持することが可能である。結果として、導入コストの軽減につながると考えられる。
また、ROSEロボットハンドは、耐久性に優れている。耐久実験として、「把持対象物の上空からスタート→対象物まで下降→把持→持ち上げ→再び元の対象物があったところまで下降→把持解除→スタート地点へ戻る」という一連の流れを繰り返し行った。その結果、40万回の把持動作に成功した。それ以降は、スキンが破損したものの把持力の低下は見られなかった(図4a)。
さらに、把持した状態での引張強さを測定指標とし、把持力の測定を行った。ROSEロボットハンドが物体を掴み、保持し続けたままで、ROSEロボットハンドにかかる垂直方向の荷重を増加させ、破損するまでの荷重を計測した。その結果、平均400Nの荷重に耐えられることが分かり、耐久性が十分であることが確認できた(図4b)。
このように、従来のソフトロボットハンドの課題の一つとして挙げられる耐久性も十分に備えており、ROSEロボットハンドは他の技術と差別化できる優れたソフトロボットハンドである。

図4:(a)繰り返し動作による耐久実験の様子
(b)把持力の測定の様子

本研究成果は、2023年7月10日から14日まで韓国で開催の国際会議Robotics: Science and Systems (RSS2023)で発表された。
なお、本研究は、国立研究開発法人科学技術振興機構(JST)・戦略的創造研究推進事業さきがけ「IoTが拓く未来」研究領域(JPMJPR2038) (研究課題「タッチIoT : 触れるインターネット実現のための肌感覚送受信機の開発」)の支援を受け行った。
【波及効果・今後の展開】
従来のロボットハンドは把持が対象物に特化しており、精緻であるが汎用性に優れていなかった。これは、対象物や周辺に危害を加えないために必要不可欠な要素として、対象物によって特定のセンシングや制御を設定していたためでもある。しかし、昨今のソフトロボティクス研究の発展により、新たな機構を持つソフトロボットハンドが開発されている。ソフトロボットハンドは、柔らかい素材や空気などを使用した機構などが多く、制御面の工夫が強みである。ROSEロボットハンドもその一つであり、他のソフトロボットハンド同様に、今後需要が増加していくと考えられる。
ここで、本提案技術が想定する製品・サービスとして、次の二つを挙げる。第一に、果物の種類を選ばずに収穫作業を代替するロボットである。第二に、被介護者のQOL(Quality of life)を向上させるための生活支援介護ロボットである。本提案技術の汎用性を基に、幅広い分野でこれらの製品と新たなサービスを提供することで、ソフトロボットハンドの普及促進が期待される。
【論文情報等】
| 題目 | ROSE: Rotation-based Squeezing Robotic Gripper toward Universal Handling of Objects |
| 著者 | Son Tien Bui, Shinya Kawano, Van Anh Ho |
| 国際会議名 | Robotics: Science and System(RSS2023) |
| 会議発表日 | 2023年7月13日 |
| 論文掲載URL | https://roboticsproceedings.org/rss19/p090.html |
| DOI | 10.15607/RSS.2023.XIX.090 |
令和5年7月14日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2023/07/14-1.html協調ロボットの未来:広範囲触覚・近接センシングの簡易な実現に成功

協調ロボットの未来:広範囲触覚・近接センシングの簡易な実現に成功
ポイント
- 周囲の環境や人に対する安全な動作を実現するための近接覚と、利用者に対して安心感を提供する触覚、2つの感覚を備えたセンシングロボットアームの開発に成功した。
- 広範囲なセンシング機能を備えていながら、複雑な配線がなく、シンプルかつ耐久性の高い設計を実現した。
- センシング装置におけるデジタルツインを構築することによって、データ駆動型のセンシング機能を備えることができ、Sim2Real[用語説明]の効果を高めることにも成功した。
| 北陸先端科学技術大学院大学(学長・寺野稔、石川県能美市)人間情報学研究領域のホ アン ヴァン(Ho Anh Van)准教授は、視覚による触覚・近接検知装置を備えたロボットアームの開発に成功した。これにより、ロボットと人間とのインターフェースに関して、人工知能(AI)を活かした人間とCyber-Physical System (CPS) [用語説明]環境における、新たな価値を創出する研究につながることが期待される。 |
【研究の背景と目的】
これまでの産業用ロボットの考え方では、人間とロボットは作業領域が明確に分離されており、ロボットは人間の安全半径内に立ち入ることが許されなかった。これは、第一義的には人間を危険から守るためだが、一方で、産業用ロボットの安全性に関する技術・研究の発展を阻害していた側面がある。安全性の確保は、最低限のセンシング技術と簡易なフェイルセーフ機能で十分とされ、研究開発のリソースは、より製品の競争力を高めるためのロボットの高速化・高精度化に注ぎ込まれてきた。しかしながら、近年の我が国における労働力不足や長引くコロナ禍による新しい生活様式の中で、これまで人間の手で行ってきた作業をロボットで代替しようとする動きが急速に高まってきている。さらに、全ての人が健康的な生活を送ることができる社会を目指すSDGsの大きな流れが加わり、現在ロボット技術に人間との調和、つまりロボットが人間と共存し、さらに人間とコラボレーションすることが強く求められている。
例えば、ロボットが人間をサポートする技術として、アームで人間を支える介護ロボットでは、介護サービスの提供を受ける人間が安心感を得られる触覚センシングの活用が検討されている。触覚は、人間同士の触れ合いにおいては愛情や信頼、思いやりを伝える重要な感覚である。しかし、ロボットの触覚技術は長年研究されてきているが、視覚技術の研究と比較すると未だ応用例は極めて少ない。また、同時に周囲の人間や環境に対する安全性を確保するためには、ロボットが周辺状況を高い精度で検知する必要があるが、特に外付けのカメラを利用する場合に、アームや利用者によって遮蔽される領域が多く、アームの近接領域の検出が困難となっている。
このような問題点に鑑み、今回、利用者が安心感を得られる接触と、安全な動作を実現する近接の両方の感覚を兼ね備えたロボットアームの技術を提案した。本研究において実現される近触覚・接覚のセンシング技術では、人間を含む周囲の環境を認識し、自立的な判断行動が可能となるロボットアームを開発することで、衝突回避等の安全性だけではなく、接触が許容される状況の判断および接触を通じた安心感の提供といった機能を有する、人工知能(AI)を搭載した協働ロボットの実現を目指す(図1)。

図1:本研究の位置付け
【研究の内容】
本研究では、低コストかつシンプルな構造を有する柔軟な触覚装置と、人間との接触を即時に検知することで、人間の行動を推定しながら人間と調和するロボットを実現した。このロボットは、人間の皮膚を模した柔軟なスキン上の複数の接触点へ加えられた力を、ロボットアームの両端に設置されたカメラが、スキンの変形の状態をリアルタイムで測定する技術によって実現した。さらに、透明なシリコンゴムと薄い柔軟な高分子分散液晶(PDLC)フィルムを組み合わせることで、柔軟なスキンの透明性をアクティブに切り替えることが可能となった(図2)。利用するPDLCフィルムは、外部から小さな電圧を印加することにより、透明/不透明を切り替えることができる。この透明/不透明の切り替えでは、近接覚と触覚の二つのモードを備え、またそのモードをシームレスに切り替えることができる。
図2:設計概念
(図2)
(右)近接覚モード(PDLCが透明):スキン内部の2台のカメラは、スキン近傍の外部オブジェクトを検知できる。
(左)触覚モード(PDLCが不透明):これまでの研究成果と同様、2台のカメラが接触または相互作用下でのスキンの歪みを検知し、触覚または力のセンシングが可能となる。
本研究で使用したロボットアームは、柔軟なスキンの内側に格子状のマーカーを備え、スキン内部に2台の小型カメラを配置している。スキンの透明性の能動的な切替えにより、近接覚と広範囲の触覚をセンシングする独創性の高い手法である。圧力センサを用いずカメラによるマーカーの変位から外力を算出することから、配線の複雑さやオクルージョン (光学遮蔽)などをほぼ完全に無くすことに成功しており、高いセンシング精度と耐久性を実現した。さらに、各モジュールの内圧を変えることでスキンの柔らかさを調整し、スキンに触れた人間に対する触感についても、制御可能である。さらに、深層学習を通じて多様な近接・接触動作・状況を予め学習させることで、人間と調和し、人間との複雑な近接・接触を実現する潜在的に高い適応性を持つと期待される。
 図3:各動作モード
図3:各動作モード
<参考動画>
動作ビデオ1:https://youtu.be/NN2u8YBLITY
動作ビデオ2:https://youtu.be/m8QzvDx_vpc
今日、ロボットは、いわゆる物理的な人間とロボットの相互作用(pHRI;physical Human-Robot Interaction)シナリオのように、安全半径の外で動作しつつ、人間と同じワークスペースを共有し(共存)、さらには人間と相互作用(コラボレーション)する必要がある。pHRIでは、ロボットは衝突の可能性を回避するだけでなく、避けられない物理的接触と意図的な物理的接触の両方を安全かつ信頼できる方法で対応することが期待されている。これを達成するために、深度カメラと力/トルクセンサーの組み合わせが提案されているが 、これは、外部カメラを使用するために、先述した視覚の遮蔽の問題を有している。近年、マルチモーダル知覚(触覚、近接など)を備えた大規模センサースキンが開発されたが、センサーネットワークのデータ取得と処理が複雑であるため、微調整が困難であり、衝突等の突発的な事故への応答が遅くなる可能性がある。
本研究は、ロボットの周りの多様な近接や接触動作・状況などをたった2台のカメラで検知することが可能なシンプルな構造をしており、信頼性を持つpHRIの実装方法となり得る。また、Sim2Realのプロセスで、実物の特性を再現できるデジタルツインにおいて、必要なデータ収集や学習などをシミュレーション環境で実施し、学習の結果を、実物に反映させることができ、今後の研究・開発の時間を大幅に縮小することも期待される。
本研究成果は、2023年2月28日にIEEE(米国電気電子学会)が発行する学術雑誌「IEEE Transactions on Robotics」のオンライン版に掲載された。また、2023年4月3日から7日までシンガポールで開催の、国際会議IEEE-RAS International Conference on Soft Robotics (RoboSoft 2023)で発表された。
なお、本研究は、国立研究開発法人科学技術振興機構(JST)・戦略的創造研究推進事業さきがけ「IoTが拓く未来」研究領域(JPMJPR2038)の支援を受け行った。
【今後の展開】
本研究によって、今後の展開が期待される製品・サービスとして、次の二つが挙げられる。一つ目は、利用者がより多くの事を自分自身でできるように支援し、さらに利用者に加え、周りの状況も考慮したロボットアームを備えた車椅子への活用である。二つ目に、サービスの提供を受ける利用者に安心感や大事にされているという感覚、思いやりなどを伝えることができる介護ロボットである。将来的に、これらの製品が介護保険等の給付対象として認可されることで普及促進へと繋がることが期待される。
【論文情報等】
| (1) | |
| 題目 | Simulation, Learning, and Application of Vision-Based Tactile Sensing at Large Scale |
| 雑誌名 | IEEE Transactions on Robotics |
| 著者 | Quan Khanh Luu, Nhan Huu Nguyen, and Van Anh Ho |
| 掲載日 | 2023年2月28日 |
| DOI | 10.1109/TRO.2023.3245983 |
| (2) | |
| 題目 | Soft Robotic Link with Controllable Transparency for Vision-based Tactile and Proximity Sensing |
| 国際会議名 | the 6th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2023) |
| 著者 | Quan Luu, Dinh Nguyen, Nhan Huu Nguyen, anh Van Anh Ho |
| 発表日 | 2023年4月6日 |
【用語解説】
コンピュータ内のシミュレーション等で学習したモデルを現実世界に用いるという強化学習の手法。
実世界(フィジカル)におけるデータを収集し、サイバー世界でデジタル技術などを用いて分析・知識化を行い、それをフィジカル側にフィードバックすることで、産業の活性化や社会問題の解決を図っていく仕組み。
令和5年4月12日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2023/04/12-1.html人間情報学研究領域のホ准教授のインタビュー記事がJST「サイエンスウィンドウ」に掲載されました
人間情報学研究領域のホ アン ヴァン准教授のインタビュー記事が、科学技術振興機構(JST)が運営するウェブマガジン「サイエンスウィンドウ」に掲載されました。
ホ准教授が取り組む、シリコンなどの柔らかい素材を使用した"ソフトロボット"の研究内容のほか、研究者としてのキャリアや、本学の研究環境についても紹介されています。ぜひご覧ください。
インタビュー記事はこちら(外部リンク)
JST Science Portal「サイエンスウィンドウ」特集記事【海を越えてきた研究者たち】
柔らかいロボットで人と協働する社会を
https://scienceportal.jst.go.jp/gateway/sciencewindow/20230215_w01/index.html
「サイエンスウィンドウ」は、科学技術振興機構(JST)が運営する、魅力あふれる科学の取り組みを分かりやすく紹介するWebマガジンです。多くの方にとって科学技術が身近なものになるよう、科学と暮らしの関係にフォーカスした情報をタイムリーに発信しています。
令和5年2月17日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2023/02/17-1.html