Ho Anh Van(ホ アン ヴァン) 准教授


ベトナム・ハノイ工科大学 卒業。
立命館大学博士(工学)。
日本学術振興会 特別研究員、三菱電機 先端総合研究所 研究員、龍谷大学 理工学部 助教を経て2017年4月より現職。
専門はロボティクス、ソフトロボティクス、触覚装置。![]()
![]()
文字通り「柔らかいロボット」を扱うソフトロボティクスの研究を進めるHo Anh Van准教授。2019年夏には、東京ビッグサイトで開催された『イノベーションジャパン2019』に全腕ロボットアームの一部を構成する触覚装置を出展してデモンストレーションを行い、来場者の好評を得ました。
大きな可能性を秘めたソフトロボティクス研究の最前線を、Ho准教授にうかがいました。
人と接するロボットの新たなかたち。「ソフトロボティクス」の大きな可能性。
ソフトロボティクスは、急速に成長しているロボティクス関連分野の中でも新しい研究分野で、世界的に注目を集めています。ソフトロボティクスが目指すのは、柔らかい材料を使って、従来の硬いロボットでは困難だった動作を実現することです。
硬いロボットの代表は産業用ロボットです。産業用ロボットには力強さと、同じ作業をより早く正確に繰り返すことが求められますが、人間にとっては危険な存在でもあり、工場内ではフェンスに囲われています。
しかし今、ロボットの活躍の場はフェンスを越え、人間の生活環境にまで広がろうとしています。人手不足が深刻な日本のものづくり現場では、人間と協調して働くロボットのニーズがあります。介護サービス分野でも、ロボット技術の活用が喫緊の課題となっています。
より人間の近くで活躍するロボットや、人間と物理的に接触するロボットには「柔らかさ」が欠かせません。一番は安全性のためです。ロボットの表面が柔らかければ、ぶつかっても人間がケガをするようなことはありません。また柔らかさは人間が触れて感じる安心感につながります。
水中を泳ぐ。コンタクトレンズを掴む。生物の動きにインスパイアされた柔らかいロボット。
当研究室では、動物や植物の優れた構造や機能に着想を得て、そのメカニズムをロボットの駆動装置(人工筋肉、アクチュエーター)や感覚装置に応用しています。
ロボットというと金属の塊というイメージがあると思いますが、私たちが使用するのは柔らかい材料です。そして、たとえば材料に電圧をかけると膨張するというような機能を利用し、ロボットの筋肉を実現します。
最も難しいのは制御です。産業用ロボットアームであれば、多くは6 軸で構成され、動きの自由度は限られます。しかしソフトロボットの自由度は無制限です。一般的な制御論がないため、それぞれの動きに対してその都度適切な方法を提案しなければなりません。ここには人工知能を活かすアプローチも考えられます。
このようにソフトロボティクスは、材料力学をはじめ、生物学、機械、電子電気、情報など、さまざまな学術分野の知識が求められる分野横断型の研究分野です。私自身もさまざまな分野や職場を経験し、そこで得た知識をどう活かすか考えて、JAISTで本格的にソフトロボティクスの研究をスタートしました。
具体的な研究事例を3つ紹介しましょう。
まず、水中を泳ぐソフトロボットの研究があります。注目したのはウナギです。私たちは、ウナギが水中でどのように推進力を得ているのかをコンピュータ上でモデルを作って解明し、そのメカニズムをロボットに応用しました。ロボットウナギは複数のアクチュエータから構成されており、それぞれ順番に流体の圧力をかけて変形させることで、しなるようにして水中を前進します。歯車やベアリングなどを使うのではなく、柔らかい材料とその変形特性を活かして形と動きを実現していくわけです。こうした水中ソフトロボットの技術は、将来的には海底の環境調査に役立つのではないかと考えています。
次にアマガエルの把持機構の模倣したソフトロボットハンドがあります。アマガエルが水に濡れた石や壁をやすやすと上っていく秘密は吸盤にあります。吸盤に細かな溝があることで吸着力が生じているのです。私たちはこの興味深いメカニズムを解明し、ロボットハンドに応用しました。ロボットハンド表面にミクロサイズの溝状のパターンを形成したことにより、濡れた柔らかい対象物を安全に持ち上げることができます。これは従来のロボットが苦手とする作業です。実験では、潰れやすいソフトコンタクトレンズをロボットハンドでつまみ上げることに成功しています。

このように自然界に存在する現象を探索、発見し、ロボットへと展開するためには、バイオ系の知識とロボット系の知識の両方が必要です。
また、視点を変えると、生物の仕組みを再現するソフトロボティクスは、生物を知ることにも役立ちます。生物の動きに倣ったロボットを実際に動かすことで、その生物を観察するなどして得た仮説を確かめることができるのです。
全身が柔らかく、触覚を通じて人間を安全に優しくサポートできるロボットを目指す。
3つ目の研究事例は、触覚を持つロボットです。
ロボットに触覚があれば、周囲の環境を認識し、人間とより安全に接することができます。また触覚を通じたハグや握手というようなコミュニケーションは、人間に安心感や幸福感をもたらします。私たちの最終目標は、ディズニー映画『ベイマックス』の世界です。ベイマックスは全身柔らかくて触覚があるケアロボットで、人間と優しく接することができます。
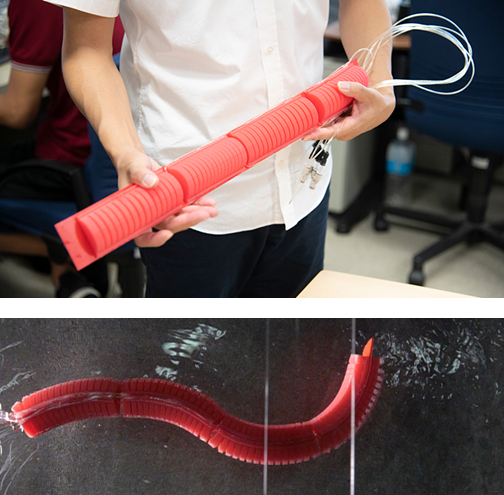
研究室では現在、ベイマックスの腕ともいえるロボットアームの研究を進めています。第一段階として開発した柔らかい触覚装置は、全体に触覚を備え、他の物体との接触や圧力を検知できる技術です。
この触覚装置は、硬い「骨」と、柔軟な「スキン」から構成されます。円筒形のスキンの内側に多数のマーカーが規則的に配置され、両端に2つのカメラが内蔵されています。人間が装置を掴んだり、さすったりするとスキンが変形しますが、これに伴って生じるマーカーの三次元の動きをカメラが追従することで、どの部分にどんな力がかかったのかを推定することができます。
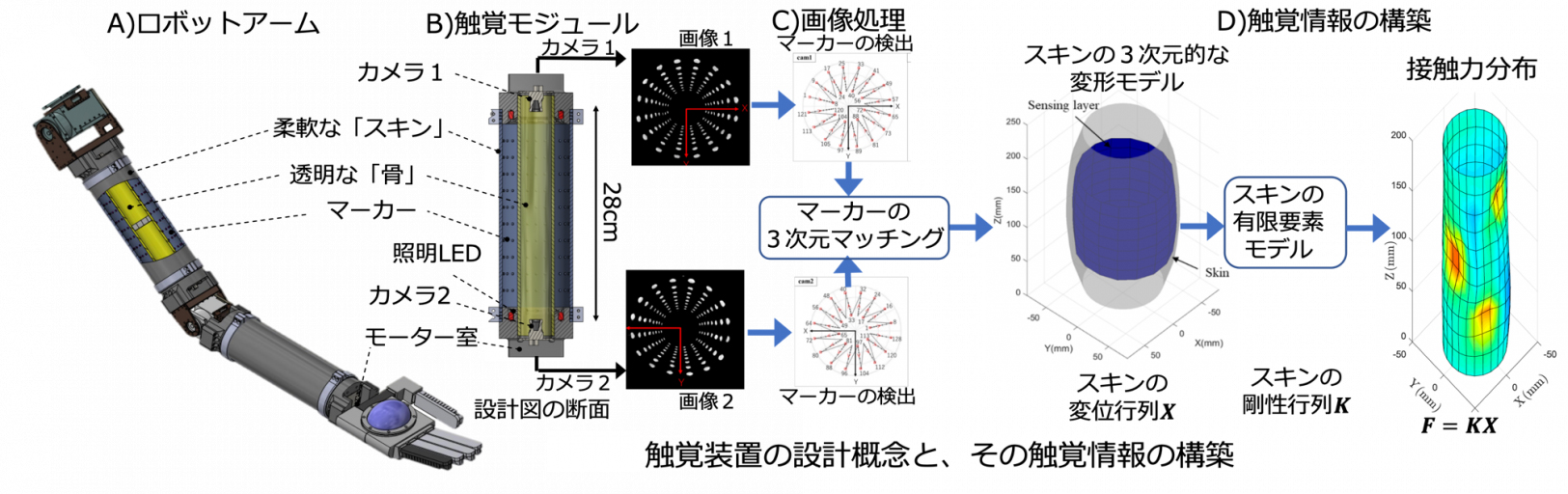
※クリックすると大きな画像が開きます
従来の硬いロボットの発想では、こうした大規模な触覚を実現するためには多くのセンシング装置を埋め込む必要があり、耐久性が低いという問題がありました。私たちの技術はシンプルな構造でその問題をクリアし、さらに柔らかな触り心地というメリットも備えています。車椅子に取り付けて人間をサポートするロボットアームや、セル生産方式で人間と一緒にものづくりをするロボットなど、ロボットの活躍の場はぐんと広がるでしょう、人間同士は、さする、とんとんと叩く、押すといった接触動作でさまざまな感情や意図を相手に伝えます。今後は人工知能を搭載するなどして、触覚を通じて人間の多様な感情や意図を推定し、対応できるロボットを実現したいと考えています。
研究者として発想も柔らかく。
ロボットに関する研究は多くの大学や企業で行われています。新しく面白いアイデアがなければ世界に発信することはできません。アイデアが勝負です。学生の皆さんにも、言われたことだけするのではなく、自主的で自由なアイデアの提案を期待しています。
教育面では、ものごとに柔軟に、臨機応変に対応できる人材を育成したいと思っています。今身につけた技術は10年後には陳腐化しているかもしれません。しかし何事にも柔軟に対応できる力は、どんな時代でも、どんな場面でも必要とされます。
人工知能の進化に伴い、今後、多くの職種が機械に置き換わると言われています。学生の皆さんには、人間にしかできない柔軟かつ創造的な力を、研究を通じて獲得してほしいと思います。
令和元年11月掲載
