研究活動の検索
研究概要(研究室ガイド)やプレスリリース・受賞・イベント情報など、マテリアルサイエンスの研究室により公開された情報の中から、興味のある情報をタグや検索機能を使って探すことができます。機械学習を用いた太陽電池用シリコン薄膜堆積条件の新たな最適化手法を開発

| 国立大学法人 国立研究開発法人理化学研究所 |
機械学習を用いた太陽電池用シリコン薄膜堆積条件の
新たな最適化手法を開発
ポイント
- 実用で頻出する制約(膜厚制限や実現不可能な実験条件排除)を考慮した「制約付きベイズ最適化」を開発
- 制約内の実験条件範囲でキャリア再結合抑止能力が最良となる薄膜堆積を少ない実験回数で実現
- 太陽電池製造や薄膜堆積に限らず広く応用可能な手法として期待
| 北陸先端科学技術大学院大学 (JAIST)(学長・寺野稔、石川県能美市)の大橋亮太大学院生(博士前期課程)、Huynh, Thi Cam Tu特任助教(サスティナブルイノベーション研究領域)、東嶺孝一技術専門員(ナノマテリアルテクノロジーセンター)、大平圭介教授(サスティナブルイノベーション研究領域)と、理化学研究所革新知能統合研究センターの沓掛健太朗研究員は、結晶シリコン太陽電池に用いられる薄膜のシリコン堆積条件を最適化する新たな手法を開発した。 |
本研究グループではこれまで、触媒化学気相堆積(Cat-CVD)法*1を用いた太陽電池用薄膜形成に取り組んできた。特に、非晶質シリコン膜と結晶シリコン基板との接合からなるシリコンヘテロ接合太陽電池*2は、低損傷での膜堆積が可能なCat-CVDの優位性が生かせることから、有用な応用先として注力している。この製膜においては、多数の製膜パラメータが存在するため、太陽電池出力を最大化する最適製膜条件の発見には、一般に膨大な実験回数(試行錯誤)を要する。
このような実験条件の最適化問題に対して、「ベイズ最適化」*3と呼ばれる、機械学習を応用した逐次最適化法が、最近よく使用されている。しかし、太陽電池出力の最大化のみを目的とした単純なベイズ最適化では、次の実験条件で得られる膜の厚さを規定する機能は無く、デバイス動作上問題が生じるような厚膜が形成されうる。また、ベイズ最適化によって提示される実験条件が、実現不可能な組み合わせ(例えばガス流量と製膜装置のポンプの排気能力の不整合)となる可能性がある。
本研究では、これらのベイズ最適化における実践的な問題を解決するための、「制約付きベイズ最適化」を開発した。この手法では、未実施の実験条件のうち、製膜装置の仕様上実現が困難な実験条件を機械学習による予測に基づいてあらかじめ排除し、残りの条件の中からキャリア再結合抑止性能を最良化する可能性のある実験条件を提示させるよう工夫した。さらに、一定の製膜時間における予測膜厚を提示させる機能を持たせ、所望の膜厚を得るための製膜時間を逆算できるよう設計した。これらの制約を組み込むことで、製膜装置が実現可能な条件の範囲内でかつ一定の膜厚を有し、キャリア再結合抑止性能を最良化するベイズ最適化の手順を進行させることが可能となった。開発した「制約付きベイズ最適化」を用いることで、わずか8回のサイクルにより最適な製膜条件に到達し、20回のサイクルでベイズ最適化工程が完了した。また、本ベイズ最適化の提示に従って複数の製膜パラメータを広い範囲で変化させた結果、高いキャリア再結合抑止性能の実現には、製膜時の基板温度と原料ガスであるSiH4の流量の組み合わせが重要であることも見出した。
本研究で得られた手法は、太陽電池製造や薄膜堆積に限らず、幅広い分野や試料作製に適用可能な手法として期待される。
「制限付きベイズ最適化」の流れ
【論文情報】
| 雑誌名 | ACS Applied Materials and Interfaces(米国化学会) |
| 題目 | High Passivation Performance of Cat-CVD i‑a-Si:H Derived from Bayesian Optimization with Practical Constraints |
| 著者 | Ryota Ohashi, Kentaro Kutsukake, Huynh Thi Cam Tu, Koichi Higashimine, and Keisuke Ohdaira |
| 掲載日 | 2024年2月8日 |
| DOI | 10.1021/acsami.3c16202 |
【用語説明】
加熱触媒体線により原料ガスを分解し、薄膜を堆積する手法。原料ガスの分解時にイオンが生成されないため、イオンの衝突による結晶シリコン表面への損傷が起こらず、良好な薄膜/基板界面が得られる。
結晶シリコンウェハと非晶質シリコン膜の接合を基本構造とする太陽電池。非晶質シリコン膜により、結晶シリコン表面に存在する結晶欠陥が有効に不活性化され、キャリア再結合が抑えられる結果、汎用の結晶シリコン太陽電池と比べて高い電圧が得られる特長がある。
形状が不明な関数の最大値や最小値を得るための手法の一種。既知である実験条件(入力)とその結果(出力)のデータセットから、未実施の実験条件における結果の予測値を、不確かさ(標準偏差)とともに推定し、不確かさも含めて予測値が最良となる条件で次の実験を行う。その実験で得られた結果を含めて予測値を推定し直す。これを繰り返し、少ない実験回数で最適な実験条件を得る。
令和6年2月19日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2024/02/19-1.html“探索・学習・予測”のシナジーを実践する次世代マテリアル設計

“探索・学習・予測”のシナジーを実践する
次世代マテリアル設計
マテリアルズインフォマティクス研究室
Laboratory on Materials Informatics
教授:谷池 俊明(TANIIKE Toshiaki)
E-mail:
[研究分野]
ハイスループット実験、マテリアルズインフォマティクス、計算化学
[キーワード]
固体触媒、重合、ナノコンポジット、分離膜、グラフェン、データ科学
研究を始めるのに必要な知識・能力
私たちの研究はユニークであり、様々な専門の研究者が活躍できる非常に学際的なものです。新しい分野に創意工夫を持って挑戦する志を重視し、元々の専門分野を問わず多様な学生を受け入れています。所属学生の専門は、例えば、化学(触媒・高分子・ナノ材料)、化学・機械工学、データ科学、計算科学などです。
この研究で身につく能力
所属学生は、自身の研究やゼミ活動への参画を通して、1)ハイスループット実験、データ科学、計算化学のいずれか、ないしはこれらを組み合わせて用いる先進的な材料科学研究の実践方法、2)与えられた資源の中で成果を最大化するための研究計画能力、3)国際・学際的な環境でチームワークするスキルなどを習得できます。
【就職先企業・職種】 材料、化学、化学工学、マテリアルズインフォマティクスなどに関する研究開発職
研究内容
ハイスループット実験とマテリアルズインフォマティクスによる材料科学研究
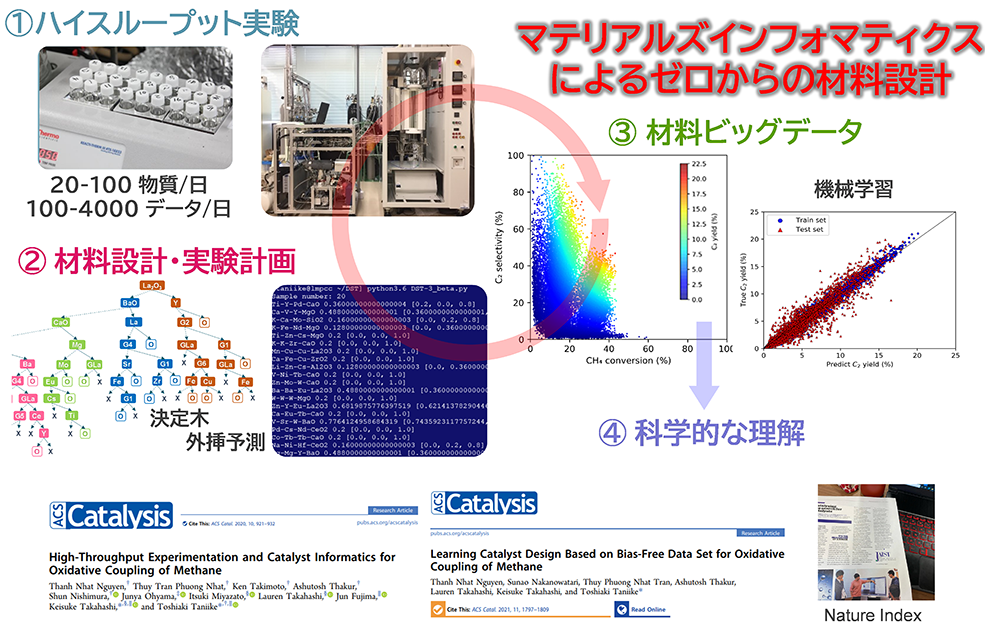
気候変動や少子高齢化など、人類社会や我が国が置かれた避けられない課題に鑑み、谷池研究室では、ハイスループット実験、データサイエンス(マテリアルズインフォマティクス)、シミュレーションを基盤とした、イノベーション志向の物質科学を目指しています。かつてない効率で膨大な材料候補を探索し、社会問題の解決を目指しています。
❶ ハイスループット実験
異なる元素や物質を組み合わせることで得られる材料の数は膨大です。マテリアルサイエンスの目標の一つは、特別に優れた組み合わせやうまい組み合わせ方(プロセス)を発見し、より優れた材料を生み出すことです。私たちの研究室では、高度に自動化・並列化された実験装置を駆使するハイスループット実験を行っています。新しい装置やプロトコルの開発を通して実験のスループットを最大化し、浮いた時間を思考や情報収集に当てる研究スタイルを志向します。
➋ データ科学
ハイスループット実験は材料の合成条件、構造、性能を紐づけた材料ビッグデータを生み出します。効率的な材料探索を行うためには、良い材料を選出するだけでなく、材料性能の良し悪しがどのような因子と相関しているかを見極める構造性能相関を明らかにしていく必要があります。多変量解析や機械学習を駆使し、全てのデータから余すことなく学習することで物質探索を飛躍的に加速します。
➌ コンピュータシミュレーション
コンピュータや計算化学の発展によって、現実的な精度でのシミュレーションが可能になってきました。一方で、コンピュータを使った新しい材料の予測(in-silico設計)にはまだまだ距離があります。最も難しい問題は、複雑な材料を代表するような分子モデルを如何に構築するかです。実験も行う当研究室では、実践的な計算化学を標榜し、計算化学の夢であるin-silico材料設計に取り組んでいます。
ハイスループット実験装置の開発やデータサイエンスのプログラミングに加え、以下5つのテーマに注力しています:触媒・ポリマーインフォマティクス、構造性能相関、MOF やグラフェンなどのナノマテリアル、ポリマーナノコンポジット。
主な研究業績
- L. Takahashi, T. Taniike, K. Takahashi et al., Constructing Catalyst Knowledge Networks from Catalysts Big Data in Oxidative Coupling for Methane for Designing Catalysts, Chemical Science 2021, 12, 12546-12555 (press released, selected as Front Cover).
- T.N. Nguyen, K. Takahashi, T. Taniike et al., High-Throughput Experimentation and Catalyst Informatics for Oxidative Coupling of Methane, ACS Catalysis, 2020, 10, 921-932 (press released).
- G. Takasao, Toru Wada, T. Taniike et al., Machine Learning-Aided Structure Determination for TiCl4-Capped MgCl2 Nanoplate of Heterogeneous Ziegler-Natta Catalyst, ACS Catalysis, 2019, 9, 2599-2609.
使用装置
ピペッティングロボット Andrew+
多目的並列反応装置(研究室開発装置)
自動マイクロ波合成装置
触媒スクリーニング装置(研究室開発装置)
光触媒スクリーニング装置(研究室開発装置)
オペランド化学発光分析装置(研究室開発装置)
化学発光イメージング装置(研究室開発装置)
その場中・遠赤外分光光度計
レーザラマン分光光度計
マイクロプレートリーダー
X線回折装置 (オートサンプラー付)
蛍光X線分析装置 (オートサンプラー付)
研究室の指導方針
私たちの研究室にはコアタイムがありません。実験や研究のスループットを最大化し、ワークライフバランスを自身で設計して下さい。豊富なスタッフ陣があなたの研究をサポートします。チームミーティング(数週間に1回)やコロキウム(月に1回)を通して密な議論や指導を行います。また、国内外の学会への参加も積極的に支援しています。
[研究室HP] URL:https://www.jaist.ac.jp/ms/labs/taniike/
無人移動ロボットによる知的環境センシング技術の開拓

無人移動ロボットによる知的環境センシング技術の開拓
移動ロボティクス研究室 Laboratory on Mobile Robotics
准教授:池 勇勳(JI Yonghoon)
E-mail:
[研究分野]
ロボティクス、センサ情報処理
[キーワード]
移動ロボット、ロボットビジョン、環境センシング、 SLAM(simultaneous localization and mapping)
研究を始めるのに必要な知識・能力
線形代数学、確率論等の数学の基礎力と、ロボット工学、計測工学、機械学習の全般的な知識を持っていた方が望ましく、好奇心を持って研究への意欲のある学生であれば歓迎します。自分のアイデアをロボットシステムに実装するために、簡単なハードウェアの制作とプログラミング言語(特にC++又はPython)に慣れている場合は有利です。
この研究で身につく能力
ロボティクスは、機械・電子・情報・制御・計測等の様々な分野の要素技術が融合される分野であり、システムインテグレーション技術が非常に重要です。具体的な研究テーマによって差はありますが、エンジニアとしての幅広い工学的知識を習得可能です。また、当研究室では実際の現場に適用可能な社会実装に焦点を当てた研究を積極的に行っているため、様々な社会ニーズと先端技術とのマッチング能力と、社会に貢献可能な新しい技術を創造する基礎能力を学ぶことができます。
【就職先企業・職種】 製造業、IT系企業、研究職等
研究内容
当研究室では、無人移動ロボットと各種センサ情報処理技術を通じて、実社会における様々な問題解決に貢献可能な研究に取り組んでいます。特に、人間の代わりに災害環境や豪雪環境など過酷な環境内に分布する様々な物理的な情報を計測することで、高度な知的環境認識及び運動制御技術を実現しています。
■被災地探査ロボットシステム
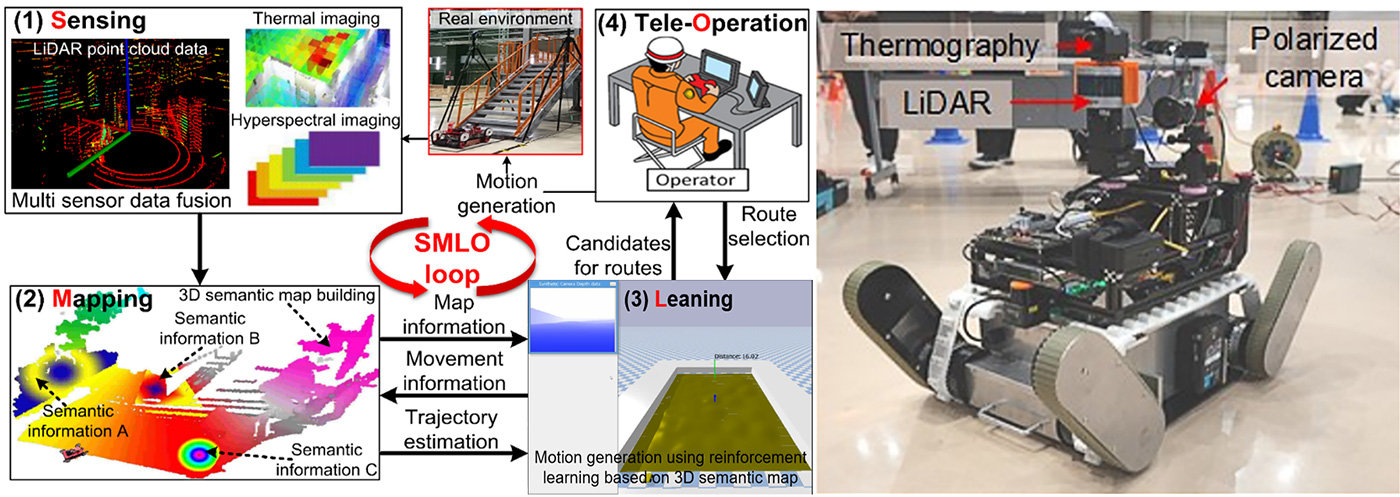 当研究室では、自然災害をはじめ原子力災害等の災害現場において、被害情報収集活動や原子炉建屋内の環境モニタリングを実施するための、半自律移動ロボットによるセマンティックサーベイマップ生成システムを開発しています。具体的には、ロボットに搭載されたサーモカメラやハイパースペクトルカメラ、LiDARなどの複数種類のセンサ情報を取得・融合し、環境の物理的な特徴量を含むマップを生成する技術を開発しています。
当研究室では、自然災害をはじめ原子力災害等の災害現場において、被害情報収集活動や原子炉建屋内の環境モニタリングを実施するための、半自律移動ロボットによるセマンティックサーベイマップ生成システムを開発しています。具体的には、ロボットに搭載されたサーモカメラやハイパースペクトルカメラ、LiDARなどの複数種類のセンサ情報を取得・融合し、環境の物理的な特徴量を含むマップを生成する技術を開発しています。
■自律除雪ロボットシステム
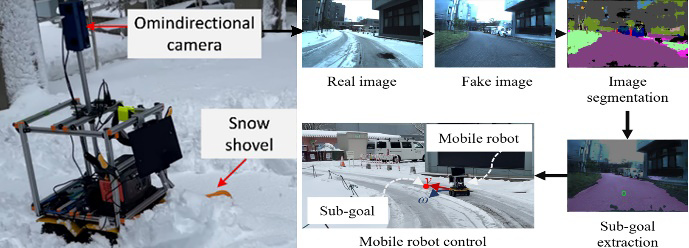 当研究室では、過酷な豪雪による冬期間の積雪環境において、除雪車の自動運転のための基盤技術を開発しており、自律除雪ロボットシステムに搭載したカメラによる周囲環境の知覚能力の向上を図るため、近年驚くほどの技術革新が見られる画像・動画生成AI技術に着目しています。夏季の道路環境と冬季の積雪道路環境との関係性を画像・動画情報により事前に学習しておくことで、冬季にも対応する夏季の偽画像を高精度で生成可能となり、雪に覆われた除雪対象の舗道領域を正確に検出することが可能です。
当研究室では、過酷な豪雪による冬期間の積雪環境において、除雪車の自動運転のための基盤技術を開発しており、自律除雪ロボットシステムに搭載したカメラによる周囲環境の知覚能力の向上を図るため、近年驚くほどの技術革新が見られる画像・動画生成AI技術に着目しています。夏季の道路環境と冬季の積雪道路環境との関係性を画像・動画情報により事前に学習しておくことで、冬季にも対応する夏季の偽画像を高精度で生成可能となり、雪に覆われた除雪対象の舗道領域を正確に検出することが可能です。
また、正確な積雪分布状態の予測による除雪ロボットの高度な経路計画や運動最適化性能を向上させるための研究を行っています。
■特殊環境における自律移動ロボットのナビゲーション
様々なサービスロボットの開発のために不可欠な要素である自律移動ロボットのナビゲーション技術は、ここ数十年間活発に研究されてきた分野であり、最近では既に多くの技術が実用化されつつあります。当研究室では、他にも様々な次世代センサからの計測情報を処理し、多様な特殊環境における自律移動ロボットのナビゲーションの性能を向上させるための研究を行っています。
主な研究業績
- Y. Wang, Y. Ji, H. Woo, Y. Tamura, H. Tsuchiya, A. Yamashita, and H. Asama, "Acoustic Camera-based Pose Graph SLAM for Dense 3-D Mapping in Underwater Environments," IEEE Journal of Oceanic Engineering, 46(3), PP. 829-847, 2021.
- Y. Ji, Y. Tanaka, Y. Tamura, M. Kimura, A. Umemura, Y. Kaneshima, H. Murakami, A. Yamashita, and H. Asama, “Adaptive Motion Planning Based on Vehicle Characteristics and Regulations for Off-Road UGVs,” IEEE Transection on Industrial Informatics, 15(1), pp. 599-611, 2019.
- Y. Ji, A. Yamashita, and H. Asama, “Automatic Calibration of Camera Sensor Network Based on 3D Texture Map Information,” Robotics and Autonomous Systems, 87(1), pp. 313-328, 2017.
使用装置
車輪型およびクローラ型の移動ロボット
LiDAR、測域センサ、光学カメラ、サーモグラフィ、音響カメラ等の環境計測センサ
研究室の指導方針
当研究室では、ロボティクスという学問分野を通じて、多方面に社会に貢献できる人材を育成することを目指しています。そのためには、社会ニーズを把握した上で関連する技術動向を反映させる指導が重要であると考えており、学生には実際の現場に適用可能な社会実装を目標とした研究テーマを与えています。次に、研究成果を世の中に発信するため、すべての学生に対して国内・国際学会発表および学術論文の作成を積極的に推奨しています。最後に、研究室内でのミーティングはもちろん他大学および企業との連携を通じて、複数人のグループでの働き方、コミュニケーション能力、プレゼンテーション能力等も鍛えることを目指しています。
[研究室HP] URL:http://robotics.jaist.ac.jp/
文部科学省マテリアル先端リサーチインフラ(ARIM)シンポジウム「ナノ物性の可視化と理解 : AIと拓くマテリアル解析の新展開」
| 日 時 | 令和7年9月11日(木)13:30~17:00 令和7年9月12日(金) 9:30~12:10 |
| 場 所 | 北陸先端科学技術大学院大学 知識科学系講義棟2F 中講義室 (ハイブリッド開催) |
| 定 員 | 90名(事前登録制) イベントへのご参加は、できるだけ事前登録をお願いしています。事前にご登録いただくことで、スムーズな受付や資料の準備が可能となります。 ただし、事前登録が難しい場合でも、当日現地での参加も可能です。直接会場にお越しいただければ、スタッフがご案内しますのでご安心ください。 |
| 参加費 | 無料 |
| 参加申込み フォーム |
https://forms.gle/CK6NjxhuR4GLpBpE9 |
| 参加申込締切 | 令和7年9月8日(月) |
| 概 要 | 文部科学省マテリアル先端リサーチインフラ(ARIM)事業では、現在、電子顕微鏡(TEM)像や分光データの収集・蓄積を進めており、近くそのデータの公開と共用が始まります。このシンポジウムでは、データ駆動型研究の分野でご活躍の先生方に、TEMから創出されたデータから、どのような隠された情報が読み取れるのか、その利活用の可能性を提示していただきます。このシンポジウムが、これからTEMデータを使用したデータ駆動型研究を推進することを考えている方々の一助となることを願っております。 |
| プログラム | ■ 1日目 9/11 (木) 13:30-13:40 開会の辞 大島 義文(北陸先端科学技術大学院大学 先端科学技術研究科 教授/副研究科長) 13:40-14:30 計測インフォマティクスのTEM応用へのビジョンと問題点 武藤 俊介(名古屋大学 未来材料・システム研究所 高度計測技術実践センター 電子顕微鏡計測部 教授) 14:30-15:20 微細構造計測データのための機械学習 志賀 元紀(東北大学 未踏スケールデータアナリティクスセンター 教授) 15:50-16:40 生成AIを活用した計測データからの情報抽出と物質設計 溝口 照康(東京大学 生産技術研究所 教授) 16:40-17:30 4D-STEMと教師無し機械学習によるナノ領域構造解析 木本 浩司(物質・材料研究機構 マテリアル基盤研究センター マテリアル基盤研究センター センター長) ■ 2日目 9/12 (金) 9:30-10:20 Data-Driven AI for Visualizing Materials Dynamics HIEU CHI DAM(北陸先端科学技術大学院大学 先端科学技術研究科 教授) 10:20-11:10 情報科学の援用によるナノスケール幾何学情報の抽出および3次元可視化 井原 史朗(九州大学 先導物質化学研究所 助教) 11:10-12:00 画像処理を活用した電子顕微鏡画像からのナノ材料情報の抽出 麻生 浩平(北陸先端科学技術大学院大学 先端科学技術研究科 講師) 12:00-12:05 閉会の辞 高村 由起子(北陸先端科学技術大学院大学 先端科学技術研究科 教授/マテリアル先端リサーチインフラ スポーク機関 業務主任者) |
| 主 催 | 主催/国立大学法人 北陸先端科学技術大学院大学 (文部科学省 マテリアル先端リサーチインフラ スポーク機関) 協賛/国立大学法人 東海国立大学機構 名古屋大学 (文部科学省 マテリアル先端リサーチインフラ 次世代バイオマテリアルハブ機関) 協賛/国立大学法人 九州大学 (文部科学省 マテリアル先端リサーチインフラ 次世代ナノスケールマテリアルハブ機関) |
| 問合せ先 | 国立大学法人 北陸先端科学技術大学院大学 ナノマテリアルテクノロジーセンター内 シンポジウム事務局 〒923-1292 石川県能美市旭台1-1 TEL:0761-51-1449 E-mail:arim ARIMシンポジウム担当:東嶺・橋本・麻生・大島・高村 |
| ホームページ | https://www.jaist.ac.jp/project/arim/ |
生命機能工学領域の平塚准教授らの共同研究がNEDO「次世代人工知能・ロボット中核技術開発」に採択
生命機能工学領域の平塚祐一准教授が参画する研究課題が、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の「次世代人工知能・ロボット中核技術開発」に採択されました。
NEDOは、2015年に策定された政府の「ロボット新戦略」を受け、2015年度から「次世代人工知能・ロボット中核技術開発」を推進しています。このプロジェクトは、現在のロボット関連技術の延長上に留まらない、人間の能力を超えることを狙った革新的な要素技術をターゲットとし、これまで人工知能・ロボットの導入を考えもつかなかった未開拓の分野で、新しい需要を創出することを狙っています。
NEDOは、次世代の人工知能・ロボットの研究開発強化に向けて、「次世代人工知能技術分野」および「革新的ロボット要素技術分野」において、今まで実現されていない革新的な要素技術をターゲットに公募を実施し、今回、13テーマを採択しました。
■採択期間
平成28年度~平成29年度(継続の可能性あり)
■研究課題
「生体分子を用いたロボットの研究開発」
■共同研究機関
国立大学法人北陸先端科学技術大学院大学
国立大学法人東京工業大学
国立大学法人北海道大学
詳しくはNEDOホームページをご覧下さい。
http://www.nedo.go.jp/news/press/AA5_100599.html
平成28年7月19日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2016/07/19-1.html人と安全に協働できる"ソフトロボットリンク"を開発 触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
人と安全に協働できる"ソフトロボットリンク"を開発
触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
【ポイント】
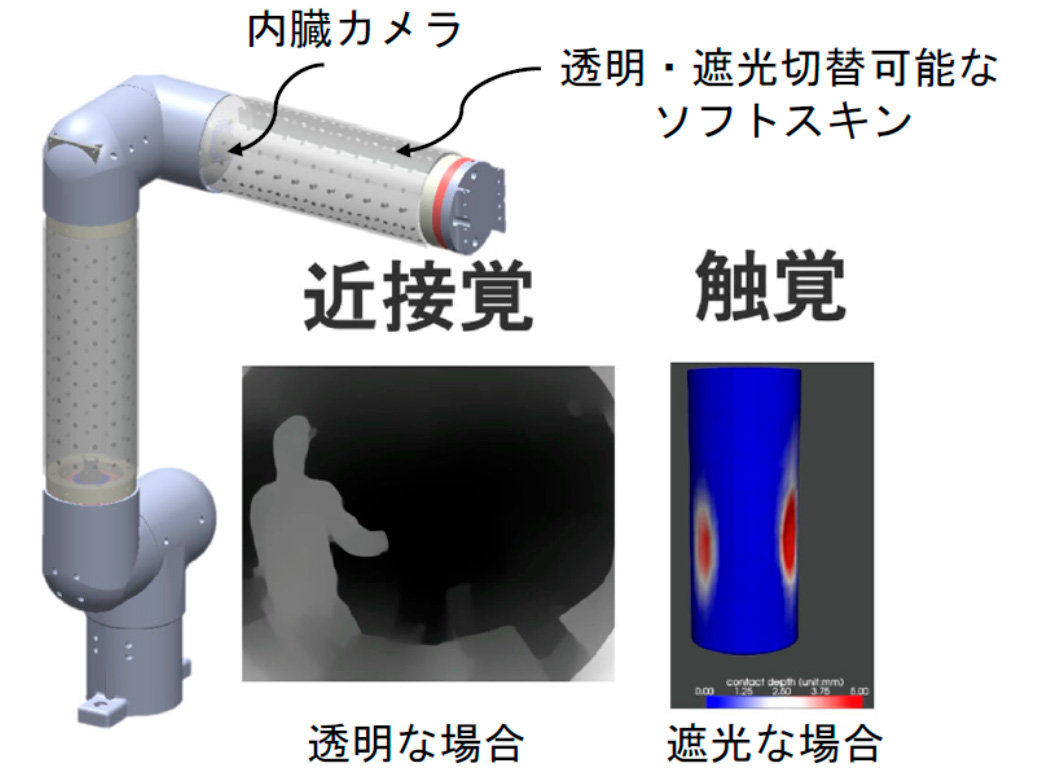
- 透明・不透明を切り替えられるソフトスキンと視覚センサーを用い、近接センシングとスキン変形の解析による触覚センシングを備えたマルチモーダルソフトセンシング技術「ProTac」を開発
- 市販ロボットアームにも取り付け可能
- 従来の剛体リンクでは困難とされる、接触の多い環境下での動作制御が可能
- 農業や介護など、人とロボットが協働する作業への応用に期待
- AI駆動型センシングフュージョン技術
| 北陸先端科学技術大学院大学 ナノマテリアル・デバイス研究領域のクアン・ハン・ルウ研究員、ホ・アン・ヴァン教授らの研究チームは、透明・不透明を電圧により切り替えられるソフト素材と視覚センシング技術を融合し、近接・触覚の両モードを切り替えて検知できるマルチモーダルソフトセンシング技術「ProTac」を世界で初めて開発しました。ProTacを用いたソフトロボットリンクは、周囲の物体を検知する近接センシングとマーカー画像の変化から触覚情報を読み取る触覚センシングを一台で切り替えて行うことができ、人との接触が多い環境で安全に動作制御が可能です。なお、本研究成果は、2025年7月28日にIEEE Transactions on Robotics(T-RO)に掲載されました。 |
【研究概要】
近年、人と同じ空間で安全かつ柔軟に作業できるロボットのニーズが高まっています。これに応えるため、私たちの研究チームは、ソフト機能材料と画像や映像から情報を取得・解析する技術である視覚センシング技術を融合した新しいマルチモーダルソフトセンシング技術「ProTac」(図1)を開発しました。
ProTacは、電圧をかけることで透明・不透明を切り替えられるポリマーディスパースド液晶(PDLC)フィルム注1)と内蔵カメラを組み合わせています。透明時には視界を活用して周囲の物体の近接を検知し、不透明時にはマーカー画像の変化から触覚情報の取得を実現します。また、最新の深層学習ベースの視覚アルゴリズムを用いることで、安定したリアルタイムセンシングが可能です。
図1:ProTacのイメージ図
この技術を用いたソフトロボットリンクは、市販のロボットアームやカスタム製作されたソフトロボットにも取り付け可能で、障害物検知に基づく速度調整や接触時の反射動作など、多様な制御戦略を実現します。ProTacを備えたソフト多機能センシングアームは、人とロボットが密に連携する場面や、従来の剛体リンクでは困難な動作制御において高い性能を示しました。
今後は、この技術を手足や胴体などロボットの各部位に応用し、高機能なマルチモーダルスキンを備えたヒューマノイドロボットの実現が期待されます。また、農業、家庭サービス、介護分野など、幅広い分野での応用も見込まれます。
【研究資金】
本研究は、日本学術振興会 科学研究費補助金 特別研究員奨励費(24KJ1203)、国立研究開発法人 科学技術振興機構(JST)さきがけ(JPMJPR2038)による財政的支援を受けて実施されました。
【論文情報】
| 掲載誌 | IEEE Transactions on Robotics |
| 論文タイトル | Vision-based Proximity and Tactile Sensing for Robot Arms: Design, Perception, and Control |
| 著者 | Quan Khanh Luu, Dinh Quang Nguyen, Nhan Huu Nguyen, Nam Phuong Dam, Van Anh Ho |
| 掲載日 | 2025年7月28日 |
| DOI | 10.1109/TRO.2025.3593087 |
【用語説明】
電圧により透明・不透明を切り替えられる液晶材料。柔軟であり、ディスプレイやスマートウィンドウなどの光の透過を制御する用途に使用される。
令和7年8月22日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/08/22-1.html本学教員がEurekAlert! Feature Storyに掲載されました
AAAS(アメリカ科学振興協会)が運営する世界最大規模のオンラインニュースサービス「EurekAlert!」ウェブサイト内の「Feature Story」に、上原教授、岡田教授、栗澤教授および谷池教授が紹介されました。この「Feature Story」は、世界中の大学や研究機関の研究成果について、研究の背景や意義、研究者の視点や社会への影響などを深堀して、わかりやすくまとめた内容となっています。
それぞれの記事は、以下からご覧ください。
- 上原隆平教授(コンピューティング科学研究領域)
"Unfolding patterns: The computer science behind origami, puzzles, and games"
折り紙・パズル・ゲームに潜む計算複雑性を理論コンピューターサイエンスの視点から解析。最適な折り手順を導くアルゴリズムの開発が、太陽電池の設計やドラッグベクター(薬物輸送体)などへの応用にも期待されています。
https://www.eurekalert.org/news-releases/1093788
- 岡田将吾教授(人間情報学研究領域)
"Bridging the emotional gap in human-AI communication"
視線・身振り・声の抑揚などのマルチモーダル情報から感情を認識し、より人間に寄り添うAIの実現を目指すアフェクティブ・コンピューティング(※)研究。教育や精神医療への応用にも期待が広がります。
※Affective Computing:人間の感情や情動を計算論的に理解・指定・活用する学際的研究領域
https://www.eurekalert.org/news-releases/1093782
- 栗澤元一教授(物質化学フロンティア研究領域)
"Toward multitasking drug carriers that do more than just deliver"
緑茶成分「EGCG」を活用し、ドラッグキャリアそのものに治療効果を持たせたナノ粒子を開発。高い薬物搭載率と長寿命を両立し、がんや白血病の治療効果向上に貢献する革新的DDS(Drug Delivery System:薬物送達システム)が注目されています。
https://www.eurekalert.org/news-releases/1093781
- 谷池俊明教授(物質化学フロンティア研究領域)
"Accelerating materials design with high-throughput experiments and data science"
機械学習とハイスループット実験(※)を組み合わせ、材料探索を飛躍的に加速。未知の反応や触媒の発見が可能となり、資源循環・化学プロセスの革新、持続可能な社会づくりに貢献する研究基盤を構築しています。
※ハイスループット実験:多数のサンプルや条件を同時に、または短時間で処理する実験手法
https://www.eurekalert.org/news-releases/1093790
令和7年8月19日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/08/19-1.htmlバイオ機能医工学研究領域の廣瀬講師がCHEMINAS 49において優秀研究賞を受賞
バイオ機能医工学研究領域の廣瀬大亮講師が、化学とマイクロ・ナノシステム学会第49回研究会(CHEMINAS 49)において、優秀研究賞を受賞しました。
一般社団法人化学とマイクロ・ナノシステム学会は、化学・生命科学・医学などの物質や生命現象を対象とする学問分野と、マイクロ・ナノスケールの材料・加工、計測・制御、システム構築などを対象とする工学技術を融合することで、新たな学術領域・技術分野を開拓し、それらを応用した新規産業の創出を目指しています。
CHEMINAS 49は、令和6年6月1日~2日にかけて東京農工大学小金井キャンパスにて開催され、研究の質とフラッシュプレゼンテーションを含む発表の質の両面において、優秀な研究発表を行った正会員または賛助会員の発表者、及びその連名者全員に優秀研究賞が授与されました。
※参考:CHEMINAS 49
■受賞年月日
令和6年6月2日
■研究題目、論文タイトル等
酸化物薄膜トランジスタ型核酸センサーの機械学習を用いた検出判定
■研究者、著者
廣瀬大亮、ZHAO Yunshu(博士前期課程2年)、高村禅
■受賞対象となった研究の内容
本研究室で研究を進めている酸化物薄膜トランジスタ(ox-TFT)型センサーは、小型、高感度、リアルタイム検出可能と、核酸検出の極めて有力なツールとなる可能性を有している。しかしながら、検体のわずかな液性変化で検出判定が左右されるという打たれ弱さがあった。そこで我々は、機械学習を用いることでより精度の高いDNAの検出判定が可能になるのではないかと考えた。500以上の実測データを用いて、主成分分析による測定データの次元圧縮ならびに教師あり学習による検出判定を行ったところ、高精度での核酸の検出判定ができることがわかった。
・発表ポスターより
背景


作製した酸化物薄膜トランジスタ型センサーと機械学習による検定結果
■受賞にあたって一言
この度は化学とマイクロ・ナノシステム学会第49回研究会において優秀研究賞を受賞でき、大変光栄です。講師就任後、初の発表でしたが、気負うことなくこれまでの成果をまとめることができたのが、吉と出たかと思っています。材料科学と情報科学を組み合わせることで、魅力的な研究となったと実感しております。高村禅教授をはじめ、研究室の皆さまより様々なサポートをいただいたことに深く感謝します。


令和6年8月22日
触媒シーズ創出に向けた自動特徴量設計技術を開発 ~事前知識なしで未知材料の機能を高精度に予測~
  |
北陸先端科学技術 北海道大学 科学技術振興機構 |
触媒シーズ創出に向けた自動特徴量設計技術を開発
~事前知識なしで未知材料の機能を高精度に予測~
ポイント
- 機械学習を用いた材料の機能予測において、経験的な側面を排除した特徴量設計技術を開発
- 事前知識を必要とせず、様々な触媒系のスモールデータに対して圧倒的な予測精度
- 機械学習を用いた材料探索の裾野を大きく広げ、材料シーズ創出を飛躍的に効率化
| 北陸先端科学技術大学院大学 物質化学フロンティア研究領域の谷池 俊明教授らは、北海道大学大学院理学研究院の髙橋 啓介教授らと共同で、機械学習を用いた材料の機能予測において、事前知識[注1]を必要とすることなく高精度な予測を実現する、特徴量設計技術を開発しました。 最近、AIやその他の機械学習技術を利用して、触媒などの実用材料に関する研究開発を加速させる取り組みが注目されています。これには、機械を訓練するためのデータと、材料を記述し機能を予測するための変数(記述子)が必要です。中でも、未知材料の機能を高精度に予測するには、機能に影響する因子を効率的かつ網羅的に取り入れた、材料記述子[注2]の存在が必要不可欠です。従来、この記述子は、対象に関する高度な専門知識(事前知識)に基づいて研究者が手ずから設計してきました。しかし、これは裏を返せば、真新しい、ないしは、非常に複雑などの事由により、知識の蓄積が十分でない対象に対しては、本来最も望まれるにも関わらず、機械学習の活用には大きな制限がありました。 本研究では、対象に対する事前知識を一切必要とせず、数十点程度の訓練データに対して機能する汎用的な特徴量設計技術を開発しました。これは、考え得る大量の記述子候補、すなわち仮説を生成し、目的にかなった記述子を機械に選ばせる、いわば仮説スクリーニング技術です。本研究では、この開発技術が、対象とする触媒反応によらず、従来技術を圧倒する予測精度を与えることや、ハイスループット実験[注3]と再帰的に組み合わせることで、膨大な候補材料から多様なシーズをピンポイントで見つけられることを示しました。本研究の成果は、機械学習を用いた材料探索の裾野を大きく拡大し、材料シーズ創出の飛躍的な効率化に役立つことが期待されます。 本研究成果は、2024年1月12日10時(英国時間)に英国の科学誌「Communications Chemistry」のオンライン版で公開されました。 本研究は、科学技術振興機構(JST)「未来社会創造事業 探索加速型(No.JPMJMI22G4)」、「戦略的創造研究推進事業 CREST(No.JPMJCR17P2)」の支援を受けたものです。 |
【研究の背景と経緯】
従来、自然科学研究は、個々の研究者の洞察に基づく仮説検証に導かれてきました。しかし、データ駆動型アプローチの隆盛により、このパラダイムは変化しつつあり、触媒を含む様々な材料分野で成功を収め始めています。このような背景の中、効果的な機械学習に適した、十分な規模を備えた材料データの欠如が大きな課題となっています。データの限界は、精巧な機械学習モデルの応用を困難にし、それでも高精度な予測を得るためには、材料の本質を捉えた記述子の存在が必要不可欠です。しかし、このような記述子設計は、関連要因を網羅するために、対象材料の高度な事前知識を必要とし、一般的に大変困難です。何より、未知の領域に踏み込むためにその事前知識が必要となることは論理的に矛盾しており、この記述子設計の経験的な側面は、データ駆動型アプローチの適用対象を、比較的良く知られた材料系に限定せざるを得ない主要因となってきました。
【研究の内容】
今回、本研究グループは、対象材料の事前知識を必要とせず、効果的な記述子を自動的に設計可能な汎用技術を開発しました。開発技術は、材料データが小規模であることを前提とし、元素などに関する一般的な物理量から演算を通して大量の記述子候補を生成し、目的に関連する記述子を機械に選択させる技術です。記述子候補を、材料の機能を説明し得る"仮説"と捉えると、開発技術は、コンピュータ上で大量の仮説を生成し重要な仮説を抽出する、いわば、仮説スクリーニング技術です。本研究では、メタンの酸化カップリング、エタノールのブタジエンへの転換、三元触媒のライトオフ温度という全く異なる対象に対して、開発技術が、触媒組成を記述子とする従来法と比較して、はるかに優れた予測精度を与えることを明らかにしました(図1)。さらに、ハイスループット実験と当該技術を組み合わせて用いる能動学習[注4]を通じて、機械が触媒設計を捉える認識の精度と汎化能力を改善していき(図2)、最終的に、類似性の低い多様な高性能触媒を、83%もの高精度[注5]でピンポイント予測することに成功しました。
このような成功の裏には、谷池教授らのグループが開発したハイスループット実験技術と、これによって創出した高品質な触媒データの存在が不可欠でした。

| 図1 開発技術を用いた触媒性能の予測。(上部)開発技術が異なる触媒反応に対して高精度な回帰を与えること、(下部)従来技術(元素組成のみ、元素組成+特徴量選択、特徴量付与のみ)と比較して極めて高い精度を与えることが示されています。1~3次は合成特徴量の次数を指し、次数が増加するほど、より複雑な特徴量をより大量に生成します。 |

| 図2 能動学習を用いた機械の改善。汎性を有さないモデル(対立仮説)の予測精度は能動学習に伴い悪化するが、汎性を有するモデル(真の仮説)の予測精度は悪化しない。 |
【今後の展開】
開発技術は汎用性が高く、触媒に限らず、訓練データを差し替えるだけで様々な材料対象へ即座に展開可能です。本研究グループは、開発技術とハイスループット実験、計画的なサンプリングを組み合わせて用いることで、数十億種もの材料を含むような極めて広大な空間から、事前知識や仮定を一切必要とすることなく、効率的に材料シーズを発見することができるようになると考えています。今後は、開発技術をソフトウェア化し、広く社会実装していく予定です。
【参考図】

| 自動特徴量設計技術: AIや機械学習を用いた材料機能の予測において、材料機能を説明し得る材料の特徴、すなわち材料記述子の質は機械学習の精度に直結します。今回開発した汎用技術は、材料記述子の設計を自動化・非専任化する技術です。対象の事前知識を必要とせず、数十点のデータから高精度な学習を可能にします。 |
【用語解説】
特定材料系の構造や機能などに関する専門知識を指す。従来のデータ駆動型アプローチでは、事前知識に基づき材料記述子を設計することが専らであった。よって、事前知識が十分に存在しない、複雑ないし未知の材料系では材料記述子の設計が困難であった。
組成や構造、物理特性といった材料を特徴付ける量の中で、目的とする材料機能と関連するものを材料記述子と呼ぶ。材料機能が単一の材料記述子によって説明できることは稀である。一方、材料記述子の数を増やすほど規模の大きなデータが求められるため、データが小さくなりがちな材料分野においては、機能を十全に説明可能な最小数の記述子を入手することが肝要である。
自動化・並列化・効率化などの手段に基づき単位時間当たりの実験数を飛躍的に増大させた実験を指す。材料分野では、研究者間にデータ取得・報告に関する統一性が存在しないことがほとんどであり、均質なデータを効率的に生成できるハイスループット実験は、データ駆動型アプローチと親和性が高い。
データを追加し繰り返し学習させることで機械の精度や汎化能力を高める方法を指す。
予測した触媒(36種)の内、エタンとエチレンの合計収率が15%以上を達成した触媒(30種)の比率を示す。
【論文情報】
| 掲載誌 | Communications Chemistry |
| 論文タイトル | "Automatic feature engineering for catalyst design using small data without prior knowledge of target catalysis" (対象の事前知識を必要としない触媒設計のための自動特徴量設計技術) |
| 著者 | Toshiaki Taniike*、Aya Fujiwara、Sunao Nakanowatari、Fernando García-Escobar、Keisuke Takahashi |
| DOI | 10.1038/s42004-023-01086-y |
令和6年1月15日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2024/01/15-1.htmlビッグデータが拓く新時代の触媒化学
![]()



北陸先端科学技術大学院大学
北海道大学
熊本大学
科学技術振興機構
ビッグデータが拓く新時代の触媒化学
ポイント
- ハイスループット触媒評価装置による材料ビッグデータの取得
- データ科学に立脚した触媒とプロセスの同時設計
|
北陸先端科学技術大学院大学(学長・浅野哲夫、石川県能美市)、先端科学技術研究科物質化学領域の谷池俊明准教授、西村俊准教授らは北海道大学(総長・名和豊春、北海道札幌市)の髙橋啓介准教授、熊本大学(学長・原田信志、熊本県熊本市)の大山順也准教授らと共同で、ハイスループット実験・材料ビッグデータ・データ科学を基盤とした触媒インフォマティクスを実現することに成功した。
近年、自然科学においても人工知能(AI)という言葉が頻繁に聞かれるようになった。特に、機械学習などのデータ科学的な方法論を駆使し、材料科学の研究開発を飛躍的に加速せんとする試みをマテリアルズインフォマティクス(MI)と呼ぶ。我々は、MIを触媒開発に利用することを試み、メタンの酸化カップリング反応(OCM)*1において、日に4000点もの触媒データを自動取得可能なハイスループット触媒評価装置*2を設計し、これを用いて過去30年で蓄積されたデータ数を一桁上回る12000点ものデータをわずか3日で取得することに成功した。さらに、得られた触媒ビッグデータを機械学習などによって分析し、その結果に基づいて固体触媒や反応プロセスを通してOCMの反応収率を大きく改善することに成功した。 MIは概念的な意味では良く研究されてきたが、これが真に材料科学に革新をもたらすか否かは、質・規模共に十分な材料データが用意できるかどうかにかかっていた。 これまで研究者らが科学論文という形で積み上げてきたデータは、研究者の実験方法や興味を強く反映しており、また、性能の低い材料データを含まず、機械学習には不向きであった。我々はハイスループット実験によってこの問題を突破し、30年の研究が、実働1ヵ月に満たない短期間で実施できることを実証した。今後、同様な方法論がさまざまな材料分野における研究開発を飛躍的に加速させ、人類社会の持続的な発展に大きく貢献する材料を次々と生み出していく時代が来ると期待される。
 本成果は、2019年12月25日0時(米国東部標準時間)にACS Publications発行「ACS Catalysis」のオンライン版に掲載された。なお、本研究は、科学技術振興機構(JST)戦略的創造研究推進事業CREST研究領域「多様な天然炭素資源の活用に資する革新的触媒と創出技術」(研究総括: 上田渉)における「実験・計算・データ科学の統合によるメタン変換触媒の探索・発見と反応機構の解明・制御」(研究代表:髙橋啓介)の支援を受けて行われた。
|
【論文情報】
| 掲載誌 | ACS Catalysis (ACS Publications) |
| 論文題目 | High-Throughput Experimentation and Catalyst Informatics for Oxidative Coupling of Methane |
| 著者 | Thanh Nhat Nguyen, Thuy Phuong Nhat Tran, Ken Takimoto, Ashutosh Thakur, Shun Nishimura, Junya Ohyama, Itsuki Miyazato, Lauren Takahashi, Jun Fujima, Keisuke Takahashi, Toshiaki Taniike |
| 掲載日 | 2019年12月25日0時(米国東部標準時間)にオンライン版に掲載 |
| DOI | 10.1021/acscatal.9b04293 |
【用語解説】
*1 メタンの酸化カップリング反応(OCM)
普遍的に存在するメタンはそのままでは化学的な有用性が低く、これを触媒によって別の有用化合物へ変換することが望ましい。メタンの酸化的カップリングとは、メタンと酸素分子の反応を通してエタンやエチレンを直接合成する高難度反応である。
*2 ハイスループット触媒評価装置
実験の回転速度をスループットと呼ぶ。ハイスループット実験装置とは高度な並列化や自動化によってスループットを劇的に改善する装置を指す。
令和元年12月25日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2019/12/25-1.html学生の福田さんがANTEC2024においてStudent Poster Winnerを受賞
学生の福田雄太さん(博士前期課程2年、物質化学フロンティア研究領域、山口研究室)がAnnual Technical Conference (ANTEC2024)においてStudent Poster Winnerを受賞しました。
ANTEC2024は、国際的なプラスチック技術者協会であるSociety of Plastics Engineers(SPE)が主催し、3月4日~7日にかけて米国セントルイスにて開催された国際会議であり、当該分野では世界で最も大きな学会です。
同会議はプラスチックのイノベーションに焦点を当て、ポリマー加工におけるリサイクルやAIを活用した射出成形、サーキュラーエコノミー、持続可能な輸送などのトピックを扱う講演者による最先端のセッションの宝庫です。プレナリー講演では、機械学習や革新的なポリマー設計、持続可能な成長について探求し、プラスチックの未来を垣間見ることができます。
※ANTEC2024
■受賞年月日
令和6年3月6日
■研究題目
Control of Cyrstalline Structure for Isotactic Polypropelylene Containing Hydrogenated Poyl
(dicyclopentadiene)
■研究者、著者
福田雄太
■受賞対象となった研究の内容
ポリプロピレン(PP)に水素化オリゴシクロペンタジエンを添加し急速冷却を行うことで、PPの結晶形態を制御できることを見いだした。その結果、得られるフィルムは高強度かつ高剛性となり、フィルムの薄肉化が可能となる。
■受賞にあたって一言
この度はANTEC2024においてポスター賞を受賞できたことを大変うれしく思っています。受賞にあたって日頃から熱心に指導してくださる山口政之教授、および研究室のメンバーに深くお礼申し上げます。


令和6年3月28日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2024/03/28-1.html触媒ビッグデータから「触媒世界地図」を描写 ~ブラックボックス化していた触媒設計を紐解く~
| 国立大学法人 北海道大学 国立大学法人 北陸先端科学技術大学院大学 国立研究開発法人 科学技術振興機構 |
触媒ビッグデータから「触媒世界地図」を描写
~ブラックボックス化していた触媒設計を紐解く~
ポイント
- 触媒の組成・実験条件の知識ネットワーク「触媒世界地図」を触媒ビッグデータから描写。
- 触媒世界地図を用いた触媒設計が可能となり、新たな活性触媒を発見。
- 大規模な科学データからの材料・触媒設計の技術基盤になることを期待。
【概要】
| 北海道大学 大学院理学研究院の髙橋 啓介准教授、髙橋 ローレン学術研究員らの研究グループは、北陸先端科学技術大学院大学 先端科学技術研究科 物質化学領域の谷池 俊明教授らと共同で、触媒ビッグデータから触媒の知識を表現した「触媒世界地図*1」を描写しました。 これまで研究グループは、多数の触媒データを高速で自動取得可能なハイスループット実験装置によりメタン酸化カップリング反応*2における触媒ビッグデータ(6万件)の構築に成功してきましたが、この規模の触媒データからどのように知識を抽出し触媒設計に結びつけるかが触媒インフォマティクス*3において大きな課題でした。 そこでメタン酸化カップリング反応におけるハイスループット実験装置により得られた触媒ビッグデータに対して、オントロジー*4(知識の関係性をネットワークとして記述)の概念を活用することにより、触媒ビックデータから元素組成・実験条件・C2収率等の関係性を描写し、触媒の世界地図を作成することに成功しました。この触媒の世界地図により各要件の関係性が明白となり、そこで得られた情報から触媒設計が実現しました。 結果、触媒の世界地図からKVEu-BaO(20%C2収率)、LiTiW-BaO(19%C2収率)、EuMgZr-BaO(19%C2収率)、MoKW-BaO(19%C2収率)等の未報告の活性触媒を設計し、実験実証することに成功しました。 本手法は触媒ビッグデータや材料ビッグデータにも適用できるため、大規模な科学データからの材料・触媒設計の技術基盤になることが期待されます。 本研究成果は、2021年9月22日(水)にChemical Science誌にてオンライン公開されました。 |
 元素と収率の関係、元素と実験条件の関係等が表現された触媒世界地図
元素と収率の関係、元素と実験条件の関係等が表現された触媒世界地図
【背景】
触媒は化学反応の反応速度を速める材料であり、自動車の排気ガスの浄化からエネルギーの変換まで幅広い分野で実用化されています。これまでの触媒開発は、研究者の熟練の経験や勘で試行錯誤して開発していました。その中で、マテリアルズインフォマティクス・触媒インフォマティクスの登場により材料・触媒科学は大きな転換期を迎えています。
マテリアルズインフォマティクス・触媒インフォマティクスでは、第4の科学であるデータ科学を用い、材料・触媒データのパターンから材料・触媒設計を行います。いわば、これまでの研究者の経験や勘をデータ科学で再現することを目的としています。しかし、材料・触媒ビッグデータから知識・設計をどのように抽出するかが大きな障壁となっています。特に機械学習等のデータ科学手法では機械がどう学習したのかを説明することができず、理論的解釈による設計が難しいという問題があります。
そのため、理論に基づいた触媒設計を行う必要がありました。
【研究手法】
メタン酸化カップリング反応を対象とし、独自開発したハイスループット実験装置で得られたメタン酸化カップリング反応の触媒ビッグデータに対して、オントロジーの概念を元にデータ内の知識と関係性をネットワークとして表現しました。
【研究成果】
触媒ビックデータから触媒の世界地図を作成することに成功しました。この触媒の世界地図により元素組成・実験条件・C2収率等の関係性が明白となり、そこで得られた情報から触媒設計を行うことに成功しました。結果、触媒の世界地図からKVEu-BaO(20%C2収率)、LiTiW-BaO(19%C2収率)、EuMgZr-BaO(19%C2収率)、MoKW-BaO(19%C2収率)等の未報告の活性触媒を設計・実験実証することに成功しました。
【今後への期待】
触媒ビッグデータからどのように触媒科学の知識を取り出すかが大きな課題でしたが、オントロジーという概念を元に知識のネットワークを設計することにより、触媒ビッグデータから知識の抽出・触媒設計が可能になることを初めて提案しました。この方法は今後の触媒ビッグデータや材料ビッグデータにも適用することができるため、大規模な科学データからの知識・材料設計の技術基盤になることが期待されます。
【謝辞】
本研究は、科学技術振興機構(JST)戦略的創造研究推進事業CREST研究領域「多様な天然炭素資源の活用に資する革新的触媒と創出技術」(研究総括:上田 渉)における「実験・計算・データ科学の統合によるメタン変換触媒の探索・発見と反応機構の解明・制御」(研究代表者:髙橋 啓介)の支援を受けて行われました。
【論文情報】
| 論文名 | Constructing Catalyst Knowledge Networks from Catalysts Big Data in Oxidative Coupling for Methane for Designing Catalysts(メタン酸化カップリング反応ビッグデータから触媒の知識ネットワークの構築と触媒設計) |
| 著者名 | 髙橋 ローレン1 , Thanh Nhat Nguyen2, 中野渡 淳2、藤原 綾2、谷池 俊明2、髙橋 啓介1 (1北海道大学大学院理学研究院、2北陸先端科学技術大学院大学) |
| 雑誌名 | Chemical Science(英国王立化学会が発行する化学ジャーナル) |
| DOI | 10.1039/D1SC04390K |
| 公表日 | 2021年9月22日(水)(オンライン公開) |
【用語解説】
*1 触媒世界地図...触媒ビックデータから元素組成・実験条件・C2収率等の関係性をネットワークとして描写したもの。
*2 メタン酸化カップリング反応...普遍的に存在するメタンはそのままでは化学的な有用性が低く、これを触媒によって別の有用化合物へ変換することが望ましい。メタンの酸化的カップリングとは、メタンと酸素分子の反応を通してエタンやエチレンを直接合成する高難度反応である。
*3 触媒インフォマティクス...データ科学手法を用いて触媒設計・触媒解析を行う学問。
*4 オントロジー...物事をどの様に概念化したかを記述する学問。
令和3年9月24日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2021/09/24-1.html触媒遺伝子「触媒シークエンシング」を発見 ~触媒インフォマティクスを駆使した新しい触媒開発に成功~
| 国立大学法人 北海道大学 国立大学法人 北陸先端科学技術大学院大学 国立研究開発法人 科学技術振興機構 |
触媒遺伝子「触媒シークエンシング」を発見
~触媒インフォマティクスを駆使した新しい触媒開発に成功~
ポイント
- 触媒遺伝子「触媒シークエンシング」を触媒ビッグデータから発見。
- 触媒組成を従来の周期表の元素記号ではなく、ゲノム配列のように記号で表現。
- 触媒遺伝子を用いた触媒設計を提案し、実験実証に成功。
【概要】
| 北海道大学大学院理学研究院の髙橋 啓介准教授、髙橋 ローレン学術研究員、藤間 淳特任准教授、宮里 一旗特任助教らの研究グループは、北陸先端科学技術大学院大学先端科学技術研究科物質化学領域の谷池 俊明教授らと共同で、触媒遺伝子「触媒シークエンシング」を触媒ビッグデータから発見しました。 これまで触媒組成は周期表の元素記号で表現されてきましたが、反応場での真の触媒の状態は複雑なため、触媒組成を記述する真の触媒記述子*1の決定が困難を極めています。そのため機械学習などを用いる触媒インフォマティクス*2において、触媒物性を記述する上で情報的制約がありました。 そこで本研究では、独自に開発したハイスループット実験装置で得られたメタン酸化カップリング反応の触媒ビッグデータに対して、触媒インフォマティクス・信号処理*3・パターン認識*4・自然言語処理*5を駆使し、新たな触媒の記述方法である「触媒の遺伝子」を定義し提案しました。この「触媒の遺伝子」を用いることで、触媒組成の情報を、生物の塩基配列のように記号で表現することが可能となります。この触媒特有の配列を「触媒シークエンシング」と名付けました。この「触媒シークエンシング」を用いると、従来の元素記号での表記では全く異なる触媒組成であっても、同じ機能を持つ触媒は同じ「触媒の遺伝子」として表現することが可能となります。触媒組成は周期表の元素記号で表現されるのが一般的でしたが、本研究により提案された「触媒遺伝子」により、今後触媒は「触媒シークエンシング」で記述することが可能となります。 この「触媒遺伝子」の有効性を確認するため、同じ「触媒遺伝子」を持つ触媒群の元素を再編成することにより、同じ触媒遺伝子を持つ触媒の設計を行い、実験実証にも成功しました。結果、高いC2収率を達成する新規触媒が発見でき、「触媒遺伝子」が触媒設計に大変有用であることが証明されました。また発見された触媒が既知の触媒と似た遺伝子を持っているのか、もしくは全く新種の触媒遺伝子なのかなど、バイオインフォマティクスで見られる遺伝子解析のような、全く新しい視点での触媒情報の解析が可能となり、より発展的かつ実用的な適用が期待できます。 本研究成果は、米国東部時間2021年7月30日(金)午前6時公開のThe Journal of Physical Chemistry Letters誌にてオンライン版が掲載されました。 |
【背景】
マテリアルズインフォマティクス・触媒インフォマティクスの登場により材料・触媒科学は大きな転換期を迎えています。マテリアルズインフォマティクス・触媒インフォマティクスでは、第4の科学であるデータ科学を用い、材料・触媒データのパターンから材料・触媒設計を行います。そのような中、触媒組成は周期表の元素記号で表現されてきましたが、反応場での真の触媒の状態は複雑なため、触媒組成を記述する真の触媒記述子の決定が困難を極めています。そのため機械学習などの触媒インフォマティクスにおいて、触媒組成の記述方法が大きな障壁となっています。周期表の元素記号に頼らず、触媒の特徴を反映した触媒組成の記述方法を決定する必要があります。
【研究手法】
独自開発したハイスループット実験装置で得られたメタン酸化カップリング反応の触媒ビッグデータを用い、触媒インフォマティクス・信号処理・パターン認識・自然言語処理を駆使し、触媒ビッグデータに隠されているパターンから「触媒の遺伝子」を提案しました。
【研究成果】
発見された「触媒の遺伝子」は生物の塩基配列のように記号で表現することができます。この触媒特有の配列を「触媒シークエンシング」と名付けました(図1)。この「触媒シークエンシング」を用いると、従来の元素記号での表記では全く異なる触媒組成であっても、同じ機能を持つ触媒は同じ「触媒の遺伝子」として表現することが可能となります。「触媒遺伝子」を持つ触媒群の元素を再編成することにより、同じ触媒遺伝子を持つ触媒の設計を行い、実験実証にも成功しました。
【今後への期待】
今回提案した「触媒遺伝子」は、様々な触媒データに適用することにより、発見された触媒が既知の触媒と似た遺伝子を持っているのか、もしくは全く新種の触媒遺伝子なのかなど、バイオインフォマティクスで見られる遺伝子解析のような、全く新しい視点での触媒情報の解析が可能となります。したがって、触媒インフォマティクスにおける触媒データの取り扱い手法の基盤技術として、より発展的かつ実用的な適用が期待できます。
【謝辞】
なお、本研究は、科学技術振興機構(JST)戦略的創造研究推進事業CREST研究領域「多様な天然炭素資源の活用に資する革新的触媒と創出技術」(研究総括:上田 渉)における「実験・計算・データ科学の統合によるメタン変換触媒の探索・発見と反応機構の解明・制御」(研究代表者:髙橋 啓介)の支援を受けて行われました。
【参考図】

図1 発見された触媒遺伝子-触媒シークエンシング
【論文情報】
| 論文名 | Catalysis Gene Expression Profiling: Sequencing and Designing Catalysts(触媒遺伝子発現プロファイリング:触媒シークエンシングと設計) |
| 著者名 | 髙橋 啓介1 、藤間 淳1、宮里 一旗1、中野渡 淳2、藤原 綾2、Thanh Nhat Nguyen2、谷池 俊明2、 髙橋 ローレン1(1北海道大学大学院理学研究院、2北陸先端科学技術大学院大学) |
| 雑誌名 | The Journal of Physical Chemistry Letters(物理化学の専門誌) |
| DOI | 10.1021/acs.jpclett.1c02111 |
| 公表日 | 日本時間2021年7月30日(金)午後8時(米国東部時間2021年7月30日(金)午前6時)(オンライン公開) |
【用語解説】
*1 触媒記述子...触媒の特徴を数値化して表現したもの。
*2 触媒インフォマティクス...データ科学手法を用いて触媒設計・触媒解析を行う学問。
*3 信号処理...信号を数理処理によって解析・処理する技術。
*4 パターン認識...データの中から規則性を取り出す技術。
*5 自然言語処理...言語や記号をコンピューターで処理する技術。
令和3年8月2日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2021/08/02-1.htmlハイスループット実験と触媒インフォマティクスが実現するゼロからの触媒設計

| 北陸先端科学技術大学院大学 北海道大学 科学技術振興機構 |
ハイスループット実験と触媒インフォマティクスが実現する
ゼロからの触媒設計
ポイント
- 物質空間からの無作為なサンプリング
- ハイスループット実験による触媒ビッグデータの取得
- バイアスを含まないデータからの触媒設計指針の抽出
| 北陸先端科学技術大学院大学(学長・寺野稔、石川県能美市)、先端科学技術研究科物質化学領域の谷池俊明教授らは北海道大学(総長・寳金清博、北海道札幌市)の髙橋啓介准教授らと共同で、ハイスループット実験と触媒インフォマティクスを駆使して前知見に依らないゼロからの触媒設計を実現する道を示した。 ある化合物を別の化合物へと変換する化学反応は、式上では単純に見えても多くの素反応によって構成されているケースが多い。化学反応の制御とは、これらの素反応を同時に制御することであり、複数の有効成分を組み合わせる多元的な触媒の設計が鍵を握っている。しかし、組み合わせ効果の予測は非常に難しく、トライアンドエラーを通して偶発的に発見した組み合わせを段階的に発展させる経験的な方法論が、固体触媒の研究開発における常套手段であった。 谷池教授らは、日に4,000点もの触媒データを自動取得可能なハイスループット実験装置*1 と触媒インフォマティクスを用いて、前知見に依らないゼロからの触媒設計を実現した。具体的には、36,540通りもの組み合わせ(=触媒)を含む広大な物質空間から300通りの組み合わせを無作為に抽出し、これらのメタンの酸化カップリング反応(OCM)*2 における性能をハイスループット実験により評価することで、前知見や作業仮説などのバイアスを含まない触媒ビッグデータを取得した。このデータを機械学習によって分析することで、触媒の設計指針をモデル化し、高性能触媒を80%の精度で予測することに成功した(試験した80%の触媒が高性能と見做し得る収率を示した)。 本研究が見出した高性能触媒の大半は、OCMに関する過去40年の研究開発史に照らして未知とみなされる組み合わせであった。ハイスループット実験と触媒インフォマティクスは、広大な物質空間を現実的な時間単位で効率的に探索する強力な手段である。本研究が用いた方法論は多くの材料分野に適用可能であり、前知見に縛られない物質探索は予期せぬ発見を多く生み出すだろう。
|
【論文情報】
| 掲載誌 | ACS Catalysis (ACS Publications) |
| 論文題目 | Learning Catalyst Design Based on Bias-Free Data Set for Oxidative Coupling of Methane |
| 著者 | Thanh Nhat Nguyen, Sunao Nakanowatari, Thuy Phuong Nhat Tran, Ashutosh Thakur, Lauren Takahashi, Keisuke Takahashi, Toshiaki Taniike |
| 掲載日 | 2021年1月22日付(米国東部標準時間)にオンライン版に掲載 |
| DOI | 10.1021/acscatal.0c04629 |
【用語解説】
*1 ハイスループット実験装置
実験の回転速度をスループットと呼ぶ。ハイスループット実験装置とは高度な並列化や自動化によってスループットを劇的に改善する装置を指す。
*2 メタンの酸化カップリング反応(OCM)
普遍的に存在するメタンはそのままでは化学的な有用性が低く、これを触媒によって別の有用化合物へ変換することが望ましい。メタンの酸化的カップリングとは、メタンと酸素分子の反応を通してエタンやエチレンを直接合成する高難度反応である。
令和3年1月27日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2021/01/27-1.html水田教授らが太陽誘電社とグラフェン超高感度においセンサの共同開発を発表
環境・エネルギー領域の水田 博教授らの研究グループは、 太陽誘電株式会社(本社:東京都、代表取締役社長:登坂正一、以下太陽誘電)と、グラフェンを用いた超高感度においセンサの共同開発を発表しました。
<発表の概要>
水田教授らの研究グループは、原子層材料グラフェンを用いた独自のNEMS(Nano-Electro-Mechanical Systems: ナノ電子機械システム)技術を用いて、グラフェン表面に物理吸着した単一CO2ガス分子によるグラフェンの微小な電気抵抗変化を、室温で検出時間<1分で高速検出する抵抗検出方式の単分子レベル気相センサの原理検証に成功しています。この抵抗検出方式グラフェンセンサはグラフェンとガス分子間の化学反応を用いておらず、吸着を加速する目的で印加している基板電界を切れば吸着分子は自然に脱離します。つまりセンサのリフレッシュ動作は必要なく、それゆえ素子のライフタイムを飛躍的に長くできます。最近では、この基盤技術を応用展開し、室温大気圧雰囲気下で濃度~500 pptの極薄アンモニアガスに対して、検出時間<10秒で高速検出することにも成功しています。また、グラフェンRF振動子を用いた質量検出方式グラフェンセンサの基盤技術も開発済みです。現在のQCM(Quartz Crystal Microbalance:水晶振動子マイクロバランス)センサの質量検出限界が数ピコグラム(10-12 g)レベルであるのに対して、本研究では、濃度~数ppbのH2/Arガス中で、グラフェン振動子表面に吸着した分子による質量の増加を、室温で100ゼプトグラム(1zg = 10-21 g)レベルで検出することに成功しています。これは、従来のQCMセンサと比較して約7桁の質量感度向上にあたります。
一方、太陽誘電は、これまでQCMを用いたにおいセンサの開発を行ってきました。開発中のセンサシステムは、①QCMセンサアレイモジュール、②センサコントロールユニット、③クラウド処理の3つの構成要素からなっており、①QCMセンサモジュールは、水晶振動子、水晶発振回路、周波数検出回路、流路、ポンプ、BLE(無線)等から構成されています。②センサコントロールユニットは、①QCMセンサモジュールと同時複数(最大32台)接続し、センサデータを取得するとともに、そのデータをクラウドへアップするゲートウェイ機能を有しています。③クラウド処理は、②センサコントロールユニットを介してアップされたセンサデータをニューラルネットワークの機械学習で処理し、においの種類や危険予知、故障予測など人にとって意味のある結果を出力します。しかし、①のQCMセンサの感度は人の嗅覚感度にも達しておらずppm程度の濃度が検出限界であることが課題となっています。
本共同開発においては、両グループの相補的な世界的卓越技術を融合させ(図1参照)、犬や線虫の嗅覚能力に迫るpptレベルの超高感度(図2参照)を可能とするマルチセンサアレイ方式パターン分析超低濃度・超微小量においセンシング技術を開発します。これは太陽誘電の高感度化ロードマップ(図3参照)において、最高感度フェーズの技術として位置づけられています。

図1 太陽誘電株式会社と水田教授グループの共同開発チーム概念図

図2 匂いセンサの応用分野と既存センサの性能および共同開発する超高感度グラフェンセンサのターゲット

図3 太陽誘電株式会社の高感度化ロードマップにおける本共同開発の位置付け

図4 共同開発チームの主メンバー:
左から水田博教授、太陽誘電株式会社開発研究所・機能デバイス開発部の服部将志課長、下舞賢一次長
<今後の展開>
生体・環境などのにおいをシングルppb~pptレベルで識別するグラフェンセンサアレイを室温・高速で動作させ、真のe-Nose技術の実現を目指します。また、これを、①皮膚ガス検知によって未病検出や精神的ストレスモニタを可能とする高機能ヘルスチェックシステムや、②シックハウス症候群の原因となっているVOC(揮発性有機化合物)など生活環境汚染モニタリングシステム開発に発展させ、新たな産業・市場開拓に挑んでまいります。

図5 超高感度グラフェンにおいセンサシステムによる応用展開例
本共同開発事業は、10月23日開催の、粉体粉末冶金協会2019年度秋季大会(第124回講演大会)講演特集『スマートソサイエティを支える高機能電子部品材料』において発表予定です。
*参考:粉体粉末冶金協会2019年度秋季大会(第124回講演大会)ホームページ
令和元年10月23日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2019/10/23-2.html学生の中山さん、修了生の北村さんと物質化学領域の谷池准教授、和田特任助教がマテリアルライフ学会総説賞を受賞

学生の中山 超さん(博士後期課程3年、物質化学領域、谷池研究室)、修了生の北村 太志さん(平成30年3月博士前期課程修了)と物質化学領域の谷池 俊明准教授、和田 透特任助教がマテリアルライフ学会総説賞を受賞しました。
マテリアルライフ学会は、有機、無機、金属からなる素材およびそれらを加工して得られる各種材料と構成物・製品並びにバイオマテリアル、古文化財などの耐久性、寿命予測と制御についての科学および技術の進歩を図ることを目的とした学会です。
マテリアルライフ学会総説賞は、編集委員による厳正なる評価を基に、優れた論文の発表者に授与されます。また、耐久性、寿命予測と制御についての科学および技術の進歩に貢献することが期待される論文に与えられるものです。
■受賞年月日
令和元年7月4日
■論文タイトル
ハイスループット化学発光イメージングと機械学習を併用した安定化剤配合の探索
■著者
中山超、北村太志、谷池俊明、和田透
■論文概要
高分子材料の長寿命化において安定化剤配合の検討は最も効果的な手段でありますが、莫大な安定化剤の組み合わせの中から効果的な配合を探索すること、安定化剤を添加した材料の寿命評価時間短縮が最大の課題でした。本研究では安定化剤配合の探索手段として、機械学習である遺伝的アルゴリズムと100検体同時の寿命評価が可能なハイスループット化学発光イメージング(HTP-CLI)を併用し、有効性の高い配合の特徴を進化させていくことで、効率的に配合の性能を向上させていくことを提案しました。
■受賞にあたっての一言
今回、このような賞をいただき大変光栄に思います。本発表において熱心なご指導を頂いた谷池准教授、和田特任助教、北村太志氏、装置を開発した荒谷尚樹氏および激励を頂いた研究室の皆様には心より感謝申し上げます。
令和元年7月11日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2019/07/11-2.html