研究活動の検索
研究概要(研究室ガイド)やプレスリリース・受賞・イベント情報など、マテリアルサイエンスの研究室により公開された情報の中から、興味のある情報をタグや検索機能を使って探すことができます。IIP(アイ・アイ・ピー)金沢示野校の生徒の皆さんが来学
7月30日(水)、IIP(金沢示野校)のロボット教室およびこどもプログラミング教室に通う生徒の皆さんと保護者の方々が、施設見学のため本学を訪れました。
当日はキャンパス内のさまざまな施設を巡り、研究や学びの現場を間近にご覧いただきました。なかでも、ロボット工学に関心のある生徒に実際の研究現場を見学させたいとのご要望を受け実施した、人間情報学研究領域の池勇勳准教授の研究室訪問では、池准教授や学生による無人移動ロボットの実演などが行われ、実際にロボットが目の前で動く様子を見ながら、研究の説明に熱心に耳を傾ける姿が印象的でした。
また、情報社会基盤研究センターに設置されている大規模並列計算機「KAGAYAKI」や貴重図書室に所蔵されている『解体新書』(杉田玄白著)、パズル展示施設「JAISTギャラリー」も見学しました。ギャラリーに併設されたプレイルームでは、生徒たちが展示されているパズルに実際に触れ、夢中になって楽しむ様子も見られました。
今回の訪問が、生徒の皆さんにとって今後の進路選択や学びへの関心を深めるきっかけとなるとともに、保護者の方々にとっても、本学の教育・研究活動への理解を深めていただく機会となれば幸いです。





令和7年8月4日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/08/04-3.htmlナノマテリアル・デバイス研究領域のHO教授のチームがRoboSoft 2025 Competitionにおいて優勝

ナノマテリアル・デバイス研究領域のHO, Anh Van教授のチームが、8th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2025) Competitionにおいて、Manipulation Challenge 1st placeを獲得しました。
RoboSoft 2025は"Interdisciplinarity and Widening Horizons"をテーマとして、令和7年4月23日~26日にかけて、スイス(ローザンヌ)にて開催されたソフトロボティクスに関する国際会議です。同会議では、研究者、業界の専門家、学生が一堂に会し、最先端の進歩を探求し、様々な分野における知見を共有しました。
同会議と併催で行われたコンペティションは、実際のロボットアプリケーションに焦点を当てたシナリオで構成され、「管内移動」、「デリケートな果物の収穫」、「医療スクリーニングと介入」という3つの具体的な課題が提示されました。HO教授のチームは「デリケートな果物の収穫」の課題に参加し、最も高い得点を獲得しました。
※参考:RoboSoft 2025(Competitions)
■受賞年月日
令和7年4月26日
■研究題目、論文タイトル等
ROSE: A Rotation-Based Soft Gripper Harnessing Morphological Computation for Adaptive and Robust Manipulation
■研究者、著者
Khoi Thanh Nguyen, Nhan Huu Nguyen, and Van Anh Ho
■受賞対象となった研究の内容
このコンペティションでは、ラズベリーのような繊細な果実を収穫する際のソフトロボットグリッパーの有効性を評価します。果実の遮蔽状態の変化、密集、動きによる乱れといった実際の農業現場に見られる課題を再現することで、現実的な収穫条件をシミュレーションしています。
フィールドに即した環境を再現することで、この競技は、実用的な果実収穫において柔軟性(コンプライアンス)と力の制御を効果的に両立できるソフトグリッパーの設計を明らかにします。
この結果は、農業分野におけるソフトロボティクスの重要な役割を強調し、グリッパー技術の現在の進展を示すとともに、自動化かつ繊細な作物収穫システムに対する大きな成長可能性を示唆しています。
提案されている課題は以下の通りです:
・課題1:ロボットが単体のベリーを摘み取る
・課題2:ロボットが密集しているベリーを摘み取る
・課題3:葉に部分的に隠れた単体のベリーを摘み取る
・課題4:葉に部分的に隠れた密集したベリーを摘み取る
・課題5:動いている単体のベリーを摘み取る
当チームのソフトグリッパー「ROSE」は、すべての課題を8分未満で成功裏に完了しました。
■受賞にあたって一言
今回のコンテストは、非常に意義があり、必要な取り組みであると感じました。競技シナリオは、距離制限、葉や枝といった障害物の存在、果実の揺れ、さらには果実の柔らかさまでも再現されており、現実の環境を非常によく模倣していました。そのため、同コンテストは、ベリーの収穫能力を評価するための優れたベンチマークとなります。
また、他のチームの興味深い設計を直接見られる場でもあり、それらの実際の効果を確認できる貴重な機会でもありました。さらに、アイデアを交換したり、将来的な共同研究の可能性について議論したりするための交流の場としても、とても良い機会になりました。
今回、Holabの収穫アームが1位を獲得できたことを非常に嬉しく思っています。この成果により、多くの人に私たちのアームを知ってもらうことができ、JAISTの存在も広く認識されるようになりました。同コンテストを通じて、自分たちの技術の実力を再確認するとともに、現時点での課題も明確になり、今後の改善に向けた大きなヒントを得ることができました。
令和7年5月20日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2025/05/20-1.html学生の松本さんと石須さんがSI2024において優秀講演賞を受賞

学生の松本創大さん(令和7年3月博士前期課程修了、ナノマテリアル・デバイス研究領域、HO研究室)と石須滉大さん(令和7年3月博士前期課程修了、ナノマテリアル・デバイス研究領域、HO研究室)が、第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)において、優秀講演賞を受賞しました。
SI2024は、「サステナブルな社会を目指すシステムインテグレーション」をテーマに、SI部門設立25周年の記念大会として、令和6年12月18日~20日にかけて、岩手県のアイーナいわて県民情報交流センターにて開催されました。
優秀講演賞は、SI部門講演会において発表された全ての発表を対象として審査が行われ、講演会実行委員会によって選出されるものです。
※参考:SI2024
■受賞年月日
令和7年2月17日
【松本創大さん】
■研究題目、論文タイトル等
口径変化が可能な吸着型ソフトロボットハンド
■研究者、著者
松本創大、HO, Anh Van
■受賞対象となった研究の内容
松ぼっくりの形状から着想を得た、吸着口を可変できるソフトロボットハンドを開発した。把持したい物体の形状、重さ、大きさに対して適切な口径を変化させることができるロボットハンドを開発し、吸着力実験と把持実験を通してロボットハンドとしての性能を評価した。
■受賞にあたって一言
自分の研究が評価されて、光栄です。今後ソフトロボットが社会実装されるための1手段になってくれることを願います。
【石須滉大さん】
■研究題目、論文タイトル等
深い接触を許容するビジョンベース触覚センサを用いた回転物体における初期滑り検知
■研究者、著者
石須滉大、Luu Quan、HO, Anh Van
■受賞対象となった研究の内容
ロボットの物体把持のために初期滑り検知が必要。視覚ベース触覚センサを使ってこれまでよりも簡単な方法で初期滑りの特徴を検知した。
■受賞にあたって一言
まずは、本研究を支えてくださったLuu QuanさんとHo, Anh Van教授に深く感謝申し上げます。本研究がソフトロボット学の発展に貢献できれば光栄です。
令和7年5月7日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2025/05/07-1.html能美市の中学生の皆さんが来学

8月26日(月)、能美市の中学2年生20名の皆さんが施設見学のため来学しました。
中学生の皆さんは、能美市と沖縄県恩納(おんな)村との教育交流パートナー事業に基づき、9月に沖縄科学技術大学院大学(OIST)を訪問されます。その前に地元にある本学(JAIST)について知り、その後にOISTを見学することで両大学の違いや特徴を認識し、結果としてより学習効果が高まることを目的として、JAISTに見学に来られました。
貴重図書室の『解体新書』(杉田玄白著)や情報社会基盤研究センターの大規模並列計算機「KAGAYAKI」、ナノマテリアルテクノロジーセンターを見学した後、ナノマテリアル・デバイス研究領域のホ アン ヴァン准教授の研究室を訪問しました。ホ准教授と研究室の学生がソフトロボットの実演を行い、中学生の皆さんは科学技術を楽しく学ぶことができたようです。

貴重図書室の見学

大規模並列計算機KAGAYAKIの見学

ナノマテリアルテクノロジーセンターの見学
ホ研究室にてソフトロボットの実演
令和6年9月4日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2024/09/04-1.html生命の「代謝」を真似た機能性ハイドロゲル材料を開発 ―自律運動や光エネルギー変換を実現する人工材料―
生命の「代謝」を真似た機能性ハイドロゲル材料を開発
―自律運動や光エネルギー変換を実現する人工材料―
ポイント
- 心拍や呼吸(異化)、光合成(同化)といった生体代謝を模倣した機能性の高分子ハイドロゲル材料「代謝模倣ハイドロゲル」開発に成功
- 高分子ゲルが、化学反応の単なる「入れ物」ではなく、化学反応と一体となって機能を生み出す能動的主体として働くことを初めて提示
- ソフトロボティクスや人工光合成によるエネルギー技術など応用に期待
| 北陸先端科学技術大学院大学 物質化学フロンティア研究領域の桶葭興資准教授と、東京大学大学院工学系研究科の吉田亮教授の研究グループは、生体の「代謝」機能に着想を得て、化学反応回路と高分子ネットワークを統合した新しい機能性ハイドロゲル*1材料「代謝模倣ハイドロゲル」を開発しました。 生体は外界と物質・エネルギーを交換する「開放系」であり、体内では複数の化学反応が連携して進行することで生命活動が維持されています。こうした代謝は、エネルギーを取り出し心拍や呼吸のように自律的な運動を引き起こす「異化」と、光合成のように外部エネルギーを利用して物質を合成する「同化」に大別されます。本研究では、この2つの機能を高分子ハイドロゲルを用いて、人工材料として再現しました。 具体的には、外部刺激なしに周期的な膨潤・収縮を示す「自励振動*2ゲル」と、光エネルギーを化学エネルギーへ変換する「人工光合成*3ゲル」を開発しました。前者は、異化反応を模したもので、化学振動反応(BZ反応)を利用し、化学エネルギーを機械運動へと変換します。後者は、水分解に関わる反応系を高分子ネットワーク内に組み込むことで、光合成のような同化反応で見られる効率的な電子移動を実現しています。 本研究は、高分子ゲルを単なる反応の場ではなく、反応と一体化して機能を発現する材料として位置づけ、「化学反応回路×高分子ネットワーク」という新たな材料設計指針を提示するものです。今後は、自律して動く人工筋肉などのソフトロボティクスや、人工光合成によるエネルギー変換、さらには環境応答型スマート材料などへの応用が期待されます。 本成果は2026年5月5日、英国王立化学会の学術誌「Chemical Communications」に掲載されました。 |
【研究の背景】
生体は外界と隔絶された閉じた系ではなく、物質やエネルギーを外界と交換しながら機能する「開放系」です。このような開放系において、生体内では多数の化学反応が同時かつ協調的に進行し、それによって生命活動が維持されています。こうした一連の反応の体系は「代謝」と呼ばれます。
代謝機能は大きく二つに分類されます。第一に、物質を分解してエネルギーを取り出す異化反応(例:呼吸)、第二に、外部エネルギーを利用して物質を合成・蓄積する同化反応(例:光合成)です。例えば、異化反応ではTCA回路に代表される循環型の反応ネットワークによってエネルギーが生成され、心拍や呼吸といった周期的な生命現象が支えられています。一方、同化反応では、植物の葉緑体において光エネルギーが捕集され、カルビン・ベンソン回路を通じてブドウ糖などの高エネルギー物質へと変換されます。
これらの代謝機能は、単なる分子反応の集合ではなく、それらを取り囲む生体膜や高分子ネットワークといった「柔軟で動的な媒体(ソフトメディエーター)」と一体となって実現されています。
一方、材料科学においても刺激応答性を有する高分子ゲルが広く研究されてきましたが、化学反応回路と高分子ネットワークが一体となって機能を発現する材料設計は、これまで十分に検討されていませんでした。
【本研究の成果】
本研究では、生体の代謝機能に着想を得て、化学反応回路と高分子ネットワークを統合した新しい機能性ハイドロゲル材料を開発しました。具体的には、以下の2種類の材料を実現しています。
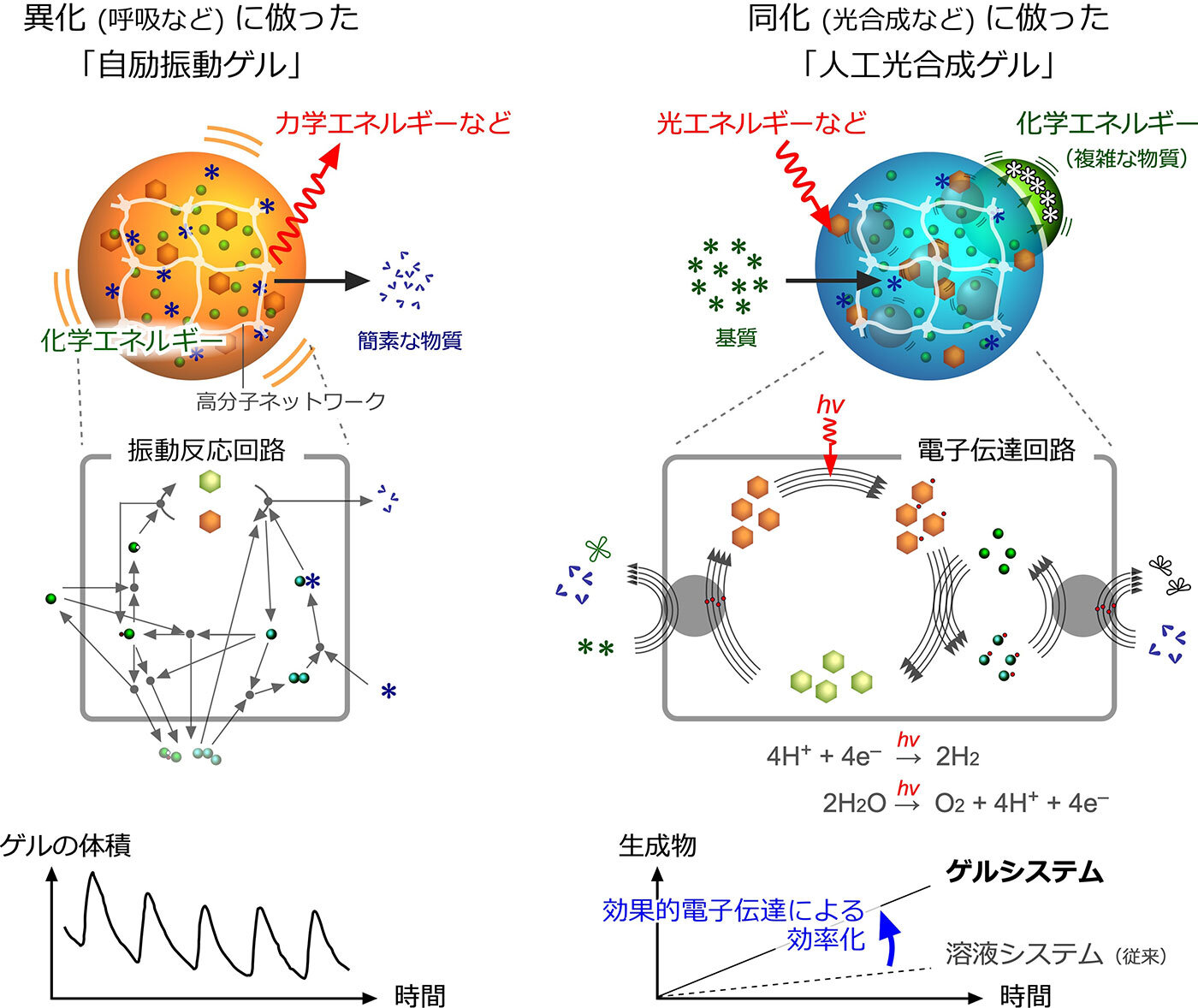
① 自励振動ゲル(異化反応の模倣)
本材料は、生体の異化反応に対応し、外部刺激なしに周期的な膨潤・収縮を繰り返す自律振動挙動を示します。これは、BZ(Belousov-Zhabotinsky)反応と呼ばれる化学振動反応を高分子ゲル内部に組み込み、化学エネルギーを力学的運動へと変換することで実現されました。
② 人工光合成ゲル(同化反応の模倣)
本材料は、生体の同化反応に対応し、光エネルギーを化学エネルギーへ変換する機能を有します。水分解反応に関わる複数の機能分子や触媒を高分子ネットワーク内に組み込むことで、電子移動を効率的に促進し、光合成に類似したエネルギー変換を実現しました。
これらの材料は、生体の代謝機能を「反応回路 × 柔軟媒体」という観点から再構成し、人工材料として実装したものです。
【社会的意義・今後の展開】
本研究の意義は、従来の材料設計の枠組みを拡張し、「化学反応回路 × 高分子ネットワーク」を一体化するという新しい設計指針を提示した点にあります。
高分子ゲルは単なる反応の場ではなく、反応と一体化して機能を発現する材料であり、その構造変化(相転移など)を通じて、化学反応や電子移動を能動的に制御・加速できることが示されました。また、分子レベルからマクロスケールに至る階層的な設計が可能であり、複数の機能が相互作用する「創発的機能」を持つ材料としての可能性が示されています。
こうした特性を踏まえ、本研究で開発された「代謝模倣ハイドロゲル」は、以下のような展開が期待されます。
(1)自律駆動型ソフトロボティクス
自励振動ゲルは外部電源なしで動作する人工筋肉やソフトアクチュエータとして利用可能であり、柔軟なロボットへの応用が期待されます
(2)人工光合成によるエネルギー・環境技術
人工光合成ゲルは、水素生成などのエネルギー変換に応用可能であり、カーボンニュートラル技術への貢献が見込まれます。
(3)環境応答型スマート材料
環境に応じて機能を変えるスマート材料として、高機能センサーへの展開が期待されます。
本研究は、材料を受動的な存在から、エネルギー変換・運動・応答を内包した動的システムへと拡張するものであり、次世代材料科学の基盤となる可能性を有します。
今後は、精密重合や自己組織化と組み合わせることで、より高度な機能材料の創製が期待されます。さらに、精密重合や自己組織化技術と組み合わせることで、より高度で進化的な機能を持つ材料の創製が期待されます。また、生体の代謝機能の理解にも新たな視点を提供するものです。
図 「代謝機能」をまねたハイドロゲル材料
【論文情報】
| 掲載誌 | Chemical Communications (The Royal Society of Chemistry) |
| 論文タイトル | Design of metabolism inspired hydrogels driven by emergence of function |
| 著者 | Kosuke Okeyoshi, Ryo Yoshida |
| DOI | 10.1039/d5cc06562c |
| 掲載日 | 2026年5月5日付、オンライン版(オープンアクセス) |
【関連情報】
高分子ネットワークで人工光合成(2024.11.6 プレスリリース)
https://www.jaist.ac.jp/whatsnew/press/2024/11/06-1.html
精密な高分子設計による能動的電子輸送が終始可能に
-高分子が触手のように電子を授受-(2023.12.14 プレスリリース)
https://www.jaist.ac.jp/whatsnew/press/2023/12/14-1.html
高分子の"伸び縮み"で「人工光合成」を加速する!
-電子伝達を制御する高分子の相転移(2019.6.12 Academist Journal)
https://academist-cf.com/journal/?p=11128
高分子の相転移を利用した人工光合成に成功
-可視光エネルギーによる高効率な水素生成を達成-(2019.5.15 プレスリリース)
https://www.jaist.ac.jp/whatsnew/press/2019/05/15-1.html
【用語解説】
水を含んで膨潤した三次元網目構造の総称。天然または合成ポリマーの三次元ネットワークであり、大量の水または生体液を吸収する。特に、高分子ゲルの構造や機能は多種多様で、天然のハイドロゲルの身近な例として、コンニャク、寒天、ゼラチンなどがある。合成のハイドロゲルでは、その高分子主鎖だけでなく多様な架橋構造が開拓されている。
その系自体の特性により系内部で非振動入力が振動に変換されて引き起こされる振動現象のこと。例えば、生体のTCA回路を模したベロウソフ・ジャボチンスキー反応(BZ反応)と呼ばれる化学振動反応系がある。
光合成を人為的に行う技術のこと。自然界での光合成は、水・二酸化炭素と、太陽光などの光エネルギーから化学エネルギーとして炭水化物などを合成するものであるが、広義の人工光合成には太陽電池を含むことがある。自然界での光合成を完全に模倣することは実現していないが、部分的には技術が確立している。可視光エネルギーによる水の分解もその代表例である。
令和8年5月12日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2026/05/12-1.html2025年度JST戦略的創造研究推進事業(CREST・ACT-X)に採択
国立研究開発法人科学技術振興機構(JST)の「戦略的創造研究推進事業(CREST・ACT-X)」において、本学の研究提案からCREST1件、ACT-X1件が採択されました。
採択者および採択課題は以下のとおりです。
【CREST】
研究代表者:ナノマテリアル・デバイス研究領域 ホ アン ヴァン教授
研究課題名:Cross-X: AI 駆動型の触覚・近接センシングおよび適応的コンポーネントによる、多様な形態に対応した身体知能の実現
研究領域:実環境知能システムを実現する基礎理論と基盤技術の創出
研究概要:
本研究は、全身にわたるマルチモーダルセンシングを、適応的形態、事前学習知識、継続学習と統合し、迅速かつ頑健に応答できる物理知能モジュールを構築することを目的とする。さらに、各モジュールにおける局所的なセンシング・駆動から、ロボット全体における統合的な機能発現へと至る「身体知能」の科学的基盤を確立し、次世代ロボティクスの新しいパラダイムを切り拓くことが期待される。
【ACT-X】
研究代表者:コンピューティング科学研究領域 鎌田 斗南助教
研究課題名:連続と離散を横断する計算基盤の確立と実問題への接続
研究領域:次世代 AI を築く数理・情報科学の革新
研究概要:
近年の計算機科学の発展により、実社会の多様な課題を計算機で扱うことが可能となった。しかし、社会課題の多くは本来的に連続的であり、計算機が扱う離散的な近似との間には根本的な差異がある。そのため、問題の困難性と容易性の境界を理解するためには、連続性を計算機上で扱う新たな枠組みが必要である。本研究では、実社会の問題を実数変数の決定問題としてモデル化し、その計算量解析を通じて、体系的な数理基盤を確立する。
CREST:
CRESTは、我が国が直面する重要な課題の克服に向けて、独創的で国際的に高い水準の目的基礎研究を推進し、社会・経済の変革をもたらす科学技術イノベーションに大きく寄与する、新たな科学知識に基づく創造的で卓越した革新的技術のシーズ(新技術シーズ)を創出することを目的とするネットワーク型(チーム型)研究です。
「実環境知能システムを実現する基礎理論と基盤技術の創出」領域では、実環境・物理空間における多様かつ予測困難な状況変化に対して柔軟かつ安全に対応できる知能システム(Physical AI)の構築に向けた基礎学理と基盤技術の創出を目指します。AI とロボティクスやIoT との連携により AI に身体性を付与するなど、知能、機械、数理、制御、計算、通信、神経科学等の学術分野の融合による高度な知能システム構築に資する研究開発を推進します。
▶ 戦略的創造研究推進事業(CREST)
ACT-X:
ACT-Xは、我が国が直面する重要な課題の克服に向けて、優れた若手研究者を発掘し育成することを目的としたネットワーク型(個人型)研究です。
「次世代AIを築く数理・情報科学の革新」領域では、既存のAI技術の限界・困難を克服するため、AI 技術・情報科学および数学・数理科学、その他様々な研究分野の融合・応用による AI技術の高度化や適用範囲の拡大などの、挑戦的な研究課題に取り組む若手研究者を支援することで、新しい価値の創造につながる研究開発を推進します。
▶ 戦略的創造研究推進事業(ACT-X)
令和7年9月29日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/09/29-2.htmlナノマテリアル・デバイス研究領域のHo教授の「ROSEハンド」が日本科学未来館1階 「Tokyo Mirai Park」内にて展示されます
東京都は「東京ベイeSGプロジェクト」として、日本科学未来館1階に「Tokyo Mirai Park」をオープンし、最先端テクノロジーを展示しており、令和7年3月19日(水)からは、展示をリニューアルし、「やわらかい」をテーマにしたユニークなテクノロジーを展示します。
今回、ナノマテリアル・デバイス研究領域のHo Anh-Van(ホ アン ヴァン)教授のバラの花から着想を得た、モノを包み込むように掴むソフトロボットハンド「ROSEハンド」が展示されますので、ぜひお立ち寄りください。
東京都の報道発表資料はこちら(外部リンク)
「Tokyo Mirai Park」における展示のリニューアル及び「先行プロジェクト」成果発表会の開催について
令和7年3月13日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/03/13-1.html金沢大学・北陸先端科学技術大学院大学 第3回共同シンポジウムを開催

令和6年7月29日(月)、本学小ホールにおいて、金沢大学・北陸先端科学技術大学院大学 第3回共同シンポジウムを開催しました。
金沢大学と本学は、平成30年度より融合科学共同専攻における分野融合型研究を推進してきましたが、昨年度より、融合科学共同専攻の活動にとどまらず、両大学間の共同研究の発展と促進を目的に共同シンポジウムを開催しており、今回で第3回目の開催となります。
「AI」をテーマに開催した今回は、寺野 稔学長による開会挨拶後、本学 人間情報学研究領域 池 勇勳准教授、金沢大学 融合研究域 融合科学系 米陀 佳祐准教授、金沢大学 融合研究域 融合科学系 藤生 慎准教授、本学 人間情報学研究領域 岡田 将吾准教授にそれぞれAI技術に関する先進的な研究開発についてご講演いただき、金沢大学 和田 隆志学長の挨拶をもって閉会となりました。
本シンポジウムが、今後の両大学間の共同研究の発展と促進を目的としていることから、各講師の先生方は、自身の研究内容の説明に加えて、「どのような研究分野との共同研究が可能か」という点も併せて講演されました。
また、共同研究のきっかけは研究者同士の雑談からというケースが多いことから、シンポジウム終了後に研究者同士が自由に歓談できる時間を設けました。講演後のリラックスした空間の中、多くの研究者が活発に情報交換を行い、お互いの研究内容について理解を深めました。
オンライン配信とのハイフレックス形式にて開催した本シンポジウムには、両大学から多くの方が参加され、質疑応答の時間にも研究者間による活発な意見交換が行われました。本シンポジウムが今後両大学間の共同研究発展の端緒となるよう推進して参ります。

開会の挨拶をする寺野学長
講演①「無人移動ロボットによる過酷な環境への挑戦」
池 勇勳 准教授
(本学 人間情報学研究領域)

講演②「市街地自動運転の認識技術と実証実験の取り組みについて」
米陀 佳祐 准教授
(金沢大学 融合研究域 融合科学系)

講演③「AIを用いた戦略的次世代型橋梁点検支援システムの開発」
藤生 慎 准教授
(金沢大学 融合研究域 融合科学系)

講演④「マルチモーダルインタラクション研究の展開と課題」
岡田 将吾 准教授
(本学 人間情報学研究領域)

閉会の挨拶をする金沢大学 和田学長

歓談時間の様子
令和6年8月1日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2024/08/01-2.html第3回 金沢大学・北陸先端科学技術大学院大学 共同シンポジウム
| 開催日時 | 令和6年7月29日(月)13:30~17:25 |
| 会 場 | 本学 マテリアルサイエンス系講義棟1階 小ホール ※オンラインにて同時配信(ハイフレックス開催) |
| 対 象 | 両大学の教職員・学生 |
| テーマ | AI |
| プログラム | 13:30~ オープニング(本シンポジウムの趣旨説明等) 13:35~ 開会挨拶 北陸先端科学技術大学院大学 寺野 稔 学長 13:40~14:25 ≪講演1≫ *講演:40分、質疑応答:5分 講演者: 池 勇勳 准教授 (本学 人間情報学研究領域) 講演タイトル:無人移動ロボットによる過酷な環境への挑戦 14:30~15:15 ≪講演2≫ *講演:40分、質疑応答:5分 講演者: 米陀 佳祐 准教授 (金沢大学 融合研究域 融合科学系) 講演タイトル:市街地自動運転の認識技術と実証実験の取り組みについて 15:15~15:45 休憩 15:45~16:30 ≪講演3≫ *講演:40分、質疑応答:5分 講演者: 藤生 慎 准教授 (金沢大学 融合研究域 融合科学系) 講演タイトル:AIを用いた戦略的次世代型橋梁点検支援システムの開発 16:35~17:20 ≪講演4≫ *講演:40分、質疑応答:5分 講演者: 岡田 将吾 准教授 (本学 人間情報学研究領域) 講演タイトル:マルチモーダルインタラクション研究の展開と課題 17:20~17:25 閉会挨拶 金沢大学 和田 隆志 学長 <*終了後~18:00位まで 研究者間の歓談時間> |
| 参加申込 | 下記申込み用フォームからお申込みください https://forms.office.com/r/Jt332kgkih ※会場での参加、オンライン参加ともに事前申込みが必要です。 ※オンライン参加の方には、アクセス用URLをご連絡いただいたメールアドレスに後日送信いたします。 |
| 問合せ先 | 研究推進課 学術研究推進係 内線:1907/1912 E-mail:suishin@ml.jaist.ac.jp |

人間情報学研究領域のホ准教授らが国際会議RSS2023においてBest System Paper Awardの Finalistに選出

人間情報学研究領域のホ アン ヴァン准教授、修了生のBUI, Son Tienさん(令和5年3月博士後期課程修了、ホ研究室)および河野 晋也さん(令和5年3月博士前期課程修了、ホ研究室)が国際会議Robotics : Science and Systems(RSS)2023において発表した論文が、Best System Paper AwardのFinalistに選出されました。
RSSは、ロボティクス分野で権威あるトップカンファレンスの一つです。第19回となった今回は、令和5年7月10日から14日にかけて、韓国テグにて開催されました。
*参考:RSS2023
■年月日
令和5年7月14日
■研究題目、論文タイトル等
ROSE: Rotation-based Squeezing Robotic Gripper toward Universal Handling of Objects
■研究者、著者
Son Tien Bui, Shinya Kawano, Van Anh Ho
■対象となった研究の内容
本研究で提案したバラの花の機能と美しさに着想を得たROSE(ROtation-based-Squeezing grippEr)ロボットハンド(以下、ROSEロボットハンド)は、大面積接触と閉じた構造を特徴とし、より優しい把持接触と汎用的な把持性能を実現した。具体的に、ROSEロボットハンドでは、柔らかい素材であるソフトマテリアルを使用したスキンを作成し、樹脂製の軸部分の回転により動作するシンプルな機構を提案した。これにより、把持物を傷つけず、かつ制御の複雑さを軽減することに成功した。また、少量のソフトマテリアルと樹脂素材を用いた回転部分を3Dプリントにより形成することで安価に製作できる。さらに、ROSEロボットハンドの空間を閉じようとする動作により、単純な把持のみならず掴む動作も行えるため、把持対象が限定されない。
■選出にあたって一言
この度、RSSのようなトップ国際会議にBest System Paperファイナリストとして選ばれたのは、大変光栄です。この研究に貢献してきたHo研究室の修了生や現在のメンバーなどに感謝いたします。
令和5年8月3日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2023/08/03-1.html知能ロボティクス領域のホ准教授の研究課題がJST「研究成果最適展開支援プログラム (A-STEP)」に採択
知能ロボティクス領域のホ アン ヴァン准教授が提案した研究課題が、科学技術振興機構(JST)の「研究成果展開事業研究成果最適展開支援プログラム(A-STEP)トライアウトタイプ:with/postコロナにおける社会変革への寄与が期待される研究開発課題への支援」に採択されました。
「A-STEPトライアウト」は、大学等の研究成果に基づいた技術の実現可能性を検証する公募型の研究開発費支援制度(研究費支援)と、マッチングプランナーによる産と学のマッチングや事業化に向けての研究開発活動の支援(人的支援)により、本格的な産学共同研究開発への移行へつなぐプログラムです。
今回採択された「トライアウトタイプ:with/postコロナにおける社会変革への寄与が期待される研究開発課題への支援」は、「with/postコロナ社会の変革」や「社会のレジリエンス向上」を含めた社会課題の解決に資する、大学等の研究成果に基づいた、開発ニーズを持つ企業などが着目する技術の実現可能性を検証するための試験研究を、令和3年度公募を前倒しする形で、A-STEPトライアウトの形式を利用し、「トライアウトタイプ」として実施し、民間企業の投資意欲を刺激するとともに、with/postコロナ社会に資する新規性と経済的なインパクトを有する研究開発成果の社会的実装を加速することを目指します。
*詳しくは、JSTホームページをご覧ください。
【研究者名】知能ロボティクス領域 ホ アン ヴァン 准教授
■研究課題名
人手に代わり食品を取扱い可能なユニバーサルロボットハンドの開発
■研究概要
本研究は、様々な食品を、1つのロボットハンドで取り扱うことが可能となることで、設置やメンテナンスのコストを削減し、またロボットの稼働率を高めることを目指しています。そのため、柔らかい指先を模した機構や触覚センシングなどの独自技術を統合し、把持力を発揮する剛性と、壊れやすい食品を傷つけないソフトな接触を両立するロボットハンドを実現します。
令和3年4月13日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2021/04/13-2.htmlモデル動物が群れをつくるメカニズムを解明
モデル動物が群れをつくるメカニズムを解明
滋賀医科大学神経難病研究センターの杉 拓磨助教、西村 正樹教授、九州大学の伊藤 浩史准教授、北陸先端科学技術大学院大学先端科学技術研究科/生命機能工学領域の永井 健講師は、動物集団が群れをつくる際のメカニズムを解明しました。これにより将来的に渋滞時や災害時の群衆の効率的な流動制御や、ロボットの群知能制御などへつながることが期待されます。この研究成果は、平成31年2月18日に英国科学誌「Nature Communications(ネイチャー・コミュニケーションズ)」に掲載されました。
<ポイント>
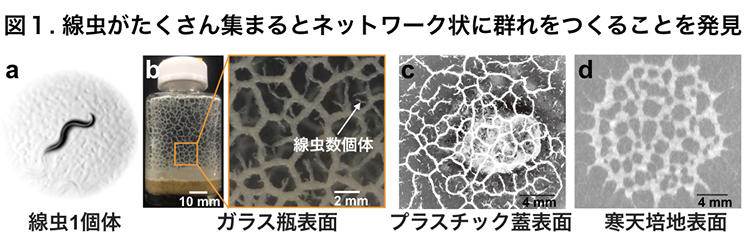
- 生物学でよく使われる線虫という動物がたくさん集まるとネットワーク状に群れることを発見。
- 線虫の群れと、人、鳥、魚の群れは共通するメカニズムで形成されることを強く示唆。
<概要>
- 半世紀近く世界中で研究されているモデル動物の線虫C. エレガンスが、集団でネットワーク状の群れをつくることを発見。世界で初めてモデル動物の集団行動の実験システムを開発。
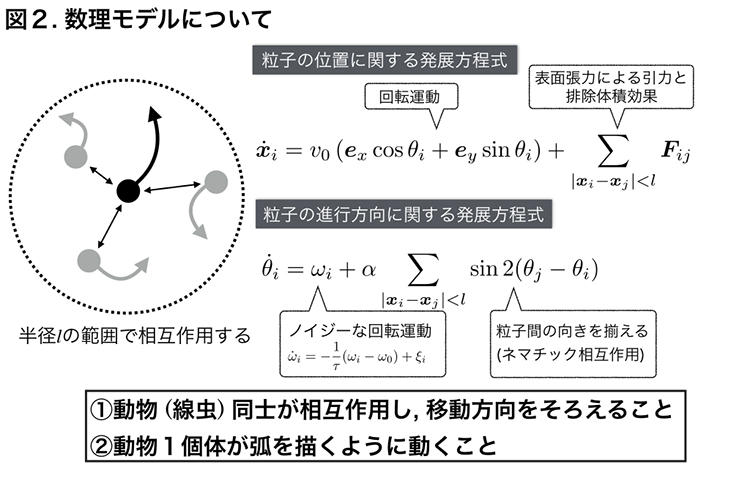
- 人、鳥、魚の群れ形成メカニズムの理論的研究で用いられてきた数理モデルをもとに数値シミュレーションを行った。
- その結果、①ぶつかった線虫が移動方向をそろえることと②線虫1個体が弧を描くように動くことが、線虫の不思議なネットワークをつくる鍵であることを明らかにした。
- 渋滞時や災害時の人の集団行動の解析やロボットの群知能の効率的制御につながることが期待できる。
<内容詳細>
【研究背景と経緯】
夕暮れどきに浮かぶ鳥の群れや水族館のイワシの群れなど、大量の動物による組織的な行動は多くの人を魅了します。また駅などの混雑時や渋滞時の人の群衆を効率的に流動させることは重要な問題です。これまで、群れ形成について理論研究が盛んに行われ、様々な群れに共通する形成メカニズムの存在が予言される一方、実験的な証明はほとんどありませんでした。これは、野外の鳥や魚の大規模な群れを実験室に再現することが不可能という、ある意味、当然の理由によるものでした。
土壌に生息する線虫C. エレガンス(図1a)は、モデル動物として半世紀近く研究され、細胞死機構の発見や緑色蛍光タンパク質の動物応用などで数々のノーベル賞の対象となりました。われわれは、線虫の体長はわずか1 mm弱であるため、仮に一度に大量飼育できれば、コンパクトな群れ形成の解析システムを作れるのではないかと考えました。さらにモデル動物としての利点である変異体を用いた解析ができることから、過去の理論的研究で提案されたメカニズムを実験的に検証できると考えました。
滋賀医科大学の杉 拓磨助教、西村 正樹教授、九州大学の伊藤 浩史准教授、北陸先端科学技術大学院大学の永井 健講師は、線虫C. エレガンスを大量飼育する方法を確立し、集団によりネットワーク状に群れをつくることを発見しました(図1)。実験と数理シミュレーションを組み合わせた解析の結果、①隣接する線虫同士が相互作用し移動方向をそろえることと②線虫1個体が弧を描くように動くことがこの群れの形成条件であることを明らかにしました(図2)。このメカニズムは人や鳥、魚の群れ形成の理論的研究から提唱されてきたものと類似していることから、本研究は、群れ形成の根底に共通のメカニズムがあることを実験で強く示唆した初めての例となります。
【研究内容】
線虫の飼育では通常、寒天培地上に塗布した大腸菌を餌として与えますが、この従来法では餌が枯渇すると線虫の増殖は止まってしまい、大量の線虫を得ることはできません。そこで本研究では、技術的ブレークスルーの1つとして、栄養に富む「ドッグフード」を線虫の餌として利用することにより、餌の枯渇なく、大量の線虫C. エレガンスを飼育することが可能になりました。そして驚くべきことに線虫集団はガラス表面(図1b)、プラスチック表面(図1c)、寒天培地表面(図1d)でネットワーク状に群れることを発見しました。この群れ形成の意味は、1個体では乾燥状態で干からびてしまう線虫が集団で群れることにより、表面張力により水を保持し、乾燥への耐性を獲得することにあると考えられます。
次に、1個体レベルと集団レベルの線虫の観察から、図2に記載の①と②が特徴的な線虫の運動であると示されました。この単純な物理的条件は過去の人や鳥、魚の群れの理論的研究から予想されたメカニズムと類似していることから、過去のこれらの研究をもとに数理モデルを作成しました。このモデルはシミュレーションにおいて線虫のネットワーク状の群れを再現しました。
つづいて、実験とシミュレーションで数理モデルのパラメータを変えた場合のそれぞれの結果の整合性を確認し、モデルの正確性を検証しました。まず上述①と②の条件(図2)に焦点をあて、線虫周囲の湿度を変えることにより相互作用の強さを変えることや(図3)、描く弧の大きさが小さい線虫変異体を用いた実験を行いました(図3)。その結果、数理モデルのシミュレーションと実験結果はよく一致しました。さらに神経科学分野の最先端テクノロジーであるオプトジェネティクス(p4参照)を用いた実験結果も再現されました。以上の実験とシミュレーションを用いた検証から、上述2条件(図2)が線虫集団による群れ形成の基本メカニズムであると結論づけました。
【今後の展開】
本研究は、人や鳥、魚などの動物集団の群れ形成に共通するメカニズムの存在を初めて実験的に示しました。今後、まずこの独自のモデル動物を用いた実験システムを用いて、さらに数理モデルの正確性を高める予定です。このようなモデルは、避難時や渋滞時の人の動きの解析につながります。実際、国内においても企業と大学が連携して、魚の群れが協調して行動する仕組みを自動運転技術に応用し、渋滞緩和に活かすための共同研究を実施しています。また、災害時や祭典での群衆の渋滞における圧死を避けるための緊急避難方法の解析は類似のモデルを用いて行われており、今後、本研究により数理モデルによる予測精度が向上すれば、効率的な避難方法の提案などにつながります。人間以外にも羊や魚の群れの効率的な制御を行うことにより、畜産や漁業などにも有用な知見を与えることも期待できます。
また、世界中で盛んなロボット開発では、ロボット単体では困難な作業を集団で行わせるため、群知能と呼ばれるアルゴリズムの開発が進められています。例えば、スイスの会社は超小型群ロボットKilobotを開発し、群制御を通して、がれき中の生存者探索や汚染物質除去などを実現しようとしています。本研究は、これらの研究分野とも密接に関連していくことが期待されます。
【参考図】

【論文情報】
| 論文名 | C. elegans collectively forms dynamical networks |
| 著者名 | Takuma Sugi*, Hiroshi Ito*, Masaki Nishimura, Ken H. Nagai* (*は責任著者) |
| 雑誌名,巻号,DOI | Nature Communications (2019年2月18日 (日本時間) 付 電子版), doi:10.1038/s41467-019-08537-y |
【研究資金情報】
- 科学研究費補助金 基盤研究(B)、若手研究(B)、新学術領域研究
- 科学技術振興機構 戦略的創造研究推進事業「さきがけ」
- 持田記念医学薬学振興財団
【用語説明】
- 線虫C. エレガンス
土壌に生息する非寄生性の線虫で、正式名称はセノハブダイディス・エレガンス。分子遺伝学的な解析の可能なモデル動物の1つ。半世紀近く前にシドニー・ブレナーにより利用され始め、細胞死の発見、RNA干渉の発見、緑色蛍光タンパク質の個体レベルでの応用により2002年と2006年のノーベル医学生理学賞、2008年のノーベル化学賞の対象となった。1998年には多細胞生物で初めて全ゲノム配列の解読が終了した。ヒトの遺伝子数と同程度の約2万個の遺伝子を持ち、それらの中にはヒトの遺伝子と類似したものが40%弱も含まれる。また体が透明なため、体外から体を傷つけずに蛍光観察できる。 - オプトジェネティクス
光遺伝学と呼ばれる、最先端のテクノロジー。光感受性のイオンチャネル分子を標的の神経細胞に発現させ、光刺激によりそのイオンチャネルを活性化させることで標的の神経細胞を活性化できる。線虫の場合、体が透明で光透過性が高いので、体を傷つけずに標的の神経細胞のみを活性化させることができる。本研究では、前進と後進を駆動する神経細胞にイオンチャネル分子を発現し、活性化した。
平成31年2月18日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2019/02/19-1.html人間情報学研究領域のホ准教授のインタビュー記事がJST「サイエンスウィンドウ」に掲載されました
人間情報学研究領域のホ アン ヴァン准教授のインタビュー記事が、科学技術振興機構(JST)が運営するウェブマガジン「サイエンスウィンドウ」に掲載されました。
ホ准教授が取り組む、シリコンなどの柔らかい素材を使用した"ソフトロボット"の研究内容のほか、研究者としてのキャリアや、本学の研究環境についても紹介されています。ぜひご覧ください。
インタビュー記事はこちら(外部リンク)
JST Science Portal「サイエンスウィンドウ」特集記事【海を越えてきた研究者たち】
柔らかいロボットで人と協働する社会を
https://scienceportal.jst.go.jp/gateway/sciencewindow/20230215_w01/index.html
「サイエンスウィンドウ」は、科学技術振興機構(JST)が運営する、魅力あふれる科学の取り組みを分かりやすく紹介するWebマガジンです。多くの方にとって科学技術が身近なものになるよう、科学と暮らしの関係にフォーカスした情報をタイムリーに発信しています。
令和5年2月17日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2023/02/17-1.htmlサスティナブルイノベーション研究領域の金子研究室の論文がLangmuir誌の表紙に採択
サスティナブルイノベーション研究領域の金子 達雄教授、高田 健司助教、学生の舟橋 靖芳さん(博士後期課程3年、金子研究室)らの論文が、米国化学会(American Chemical Society :ACS)刊行のLangmuir誌の表紙(Supplementary Cover)に採択されました。
■掲載誌
Langmuir 2022, 38, 17, 5128-5134
掲載日2022年5月3日
■著者
Yasuyoshi Funahashi, Yohei Yoshinaka, Kenji Takada*, and Tatsuo Kaneko*
■論文タイトル
Self-Standing Nanomembranes of Super-Tough Plastics
■論文概要
本研究では、高いタフネスを有するバイオベースプラスチックを用いて自己支持性ナノ薄膜の作製に成功しました。
ナノ薄膜は材料の表面保護からナノデバイスなど幅広い応用が期待されている機能性材料の一つです。特にこれらナノ薄膜を膜として単離するには、タフネス(強度、伸び率の関係)に優れた材料特性が要求されます。本研究では、著者らが従来から研究を進めてきた、高強度、高耐熱バイオベースポリアミドがこれらナノ薄膜作製に適した材料であると着目して、高分子構造の設計と強度の評価、そしてナノ薄膜の作製を試みました。その結果、当該バイオポリアミドは脂肪族ジカルボン酸と共重合化させることで、耐熱性を維持したまま非常に高いタフネスを発揮し、その数値は高強度バイオ繊維として知られるクモの糸にも匹敵するものでした。さらにこの高タフネス性によって、自己支持性のナノ薄膜を単離することができ、これらがナノデバイスやナノロボットへの応用の可能性を広げるものであることが提案されました。
本論文の表紙では、本研究によって得られたポリアミド薄膜の写真が採択され、光の干渉により虹色に見えるほどの薄膜が得られていることが分かります。
論文詳細:https://pubs.acs.org/doi/10.1021/acs.langmuir.1c02193
表紙詳細:https://pubs.acs.org/toc/langd5/38/17

令和4年5月13日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2022/05/13-2.html高感度新型コロナウイルスの迅速簡便な検査法RICCAの開発に成功 ~高度な機器不要でPCR品質の検査を15~30分で可能に~

| 国立大学法人 北陸先端科学技術大学院大学 BioSeeds株式会社 |
高感度新型コロナウイルスの迅速簡便な検査法RICCAの開発に成功
~高度な機器不要でPCR品質の検査を15~30分で可能に~
ポイント
- 41℃でのワンポット等温RNAおよびDNA増幅反応(器具不要)
- 迅速かつ高感度(RT-PCRと同じように検出)
- シンプルで瞬時の検出(ラテラルフローストリップ)
- 非常に費用対効果が高い(テストあたりの推定コスト500円未満)
【概要】
| 北陸先端科学技術大学院大学(JAIST)とJAIST発のベンチャー企業であるBioSeeds(バイオシーズ)株式会社(石川県能美市)、および複数の研究機関からなる研究者チームは、唾液から直接、極めて微量のSARS-CoV-2を検出できる高度な等温核酸増幅法(RICCAテスト)を開発しました。この方法は、シンプルなワンポット(一つの容器だけを用いる)方式のRNAウイルスの等温核酸増幅検出法で、高度な機器や、特別な実験室・検査室を必要としません。そのため、検査室にサンプルを送る必要が無く、総測定時間15~30分で、その場で即時に検出結果を得られます。これまでに、唾液中の低コピー数のSARS-CoV-2の直接検出に成功しております。研究者チームは、その場検査や、検査設備を簡単に調達できない地域等での検査手段として、実用化を目指しています。 |
【背景・研究成果】
COVID-19の感染を食い止めるための最も効果的な方法は、症状のあるなしにかかわらず、感染の疑いのある人を特定して隔離することです。SARS-CoV-2のアルファからデルタまでの4種の懸念される変異株(VOC:variant of concern)およびイータからミューまでの5種の注目すべき変異株(VOI:variant of interest)が数カ月のうちに世界中に広まったように、新しい感染性ウイルス株が急速に出現しているため、COVID-19の迅速かつ高感度で信頼性の高い検査法の利用は、病気、さらにはパンデミックの制御に不可欠です。現在、世界的に流行しているCOVID-19では、主にRT-PCRによる検査が行われています。しかし、この検査室を必要とする方法は、サンプルの前処理が必要であることや、高価な装置(蛍光光度計付きサーマルサイクラー)が必要なことから、現場での検査は難しく、また短時間での大量検査にも課題があります。PCRに類似した分子検査を行う方法として、LAMP (Loop-mediated Isothermal Amplification) やSDA (Strand Displacement Amplification) などの様々な等温核酸増幅法が現在使用されています。しかし、これらの方法は、PCRと比較して特異性や感度が低いことが報告されています。また、これらの方法の多くは、実験室でのウイルスRNAの分離、溶解、精製、増幅など、面倒な前処理を必要とします。
この問題を解決するために、JAISTのマニッシュ ビヤニ特任教授率いるチームは、ウイルスRNAの標的配列を、特別な装置を必要とせず、現場で正確に検出できる高感度かつ超高速な方法を開発し、この検出法をRICCA(RNA Isothermal Co-assisted and Coupled Amplification)と名付けました。
現在、RICCAを使用して、既にSARS-CoV-2のアルファ株とデルタ株の2つの変異株を検出しており、他の変異株にも適応可能と考えられます。RICCAアッセイに必要なものは、ヒートブロック(恒温槽)と、25種類の試薬を含む混合液があらかじめ入ったチューブだけであり、RNA特異的増幅とDNA特異的増幅を同時に行うことができます。RICCAのコストは現在のRT-PCR法等と比較しても安価であり、より広範囲な用途に適用可能と考えられます。したがって、RICCAにより、COVID-19分子診断の「ラボフリー、ラボクオリティー」のメガテストプラットフォーム(医療検査室レベルの集団検診に向けた基本的な方法)も実現できる可能性があります。また、将来的には、このプラットフォームを使って他の感染性ウイルスを検査することも可能です。
RICCAは、COVID-19の検査に必要な設備を簡単に調達できない発展途上国では特に有用です。ビヤニ特任教授のチームは、その場検査や、検査設備を簡単に調達できない地域等での検査手段として、実用化を目指しています。また、RICCAのロボット化およびモバイルプラットフォームの設計を行っています(卓上プロトタイプはBioSeeds株式会社で開発中)。このプラットフォームが実現すれば、サンプル輸送の負担を軽減し、COVID-19診断を消費者が直接実施することも可能となり、遠隔地や資源の乏しい環境で大規模な集団検査を行うことが可能となります。
この最新の研究成果の一部は、国際的な科学誌(Scientific Reports)において、京都大学(保川清教授)、大阪母子医療センター(柳原格部長)、関西学院大学(藤原伸介教授)、東北大学(児玉栄一教授)、JAIST(ビヤニ特任教授、高木昌宏教授、高村禅教授)の研究者チームと共同で行った研究成果として紹介されています。
図:SARS-CoV-2ウイルスを、直接その場で検査する新規な方法(RICCA)(A)とそれによる熱不活化SARS-CoV-2ウイルスの検出結果(A')。 閉鎖的なサンプル保持容器(B)とそれを用いた、10%ヒト唾液中での熱不活性化SARS-CoV-2ウイルスの検出例 (B')。
【謝辞】
本研究成果の一部は、AMED(日本医療研究開発機構)新興・再興感染症に対する革新的医薬品等開発推進研究事業 JP20fk0108143、AMEDウイルス等感染症対策技術開発事業 JP20he0622020、JST(科学技術振興機構) 研究成果展開事業研究成果最適展開支援プログラム A-STEP 産学共同 (育成型)JPMJTR20UU の支援を受けたものです。
【参考文献】
| 論文名 | Development of robust isothermal RNA amplification assay for lab-free testing of RNA viruses |
| 雑誌名 | Scientific Reports |
| 著者名 | Radhika Biyani, Kirti Sharma, Kenji Kojima, Madhu Biyani, Vishnu Sharma, Tarun Kumawat, Kevin Maafu Juma, Itaru Yanagihara, Shinsuke Fujiwara, Eiichi Kodama, Yuzuru Takamura, Masahiro Takagi, Kiyoshi Yasukawa and Manish Biyani |
| 掲載日 | 2021年8月6日 |
| DOI | https://doi.org/10.1038/s41598-021-95411-x |
令和3年9月8日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2021/09/08-1.html「e-messe kanazawa 2021(第36回いしかわ情報システムフェア)」に出展

7月16日(金)~17日(土)の2日間、石川県産業展示館3号館で、日本海側最大規模のICTビジネスショーである「e-messe kanazawa 2021(第36回いしかわ情報システムフェア)」が開催され、本学からリサーチコア「協生AI×デザイン拠点」のホ アン ヴァン准教授(知能ロボティクス領域)が出展しました。
ホ准教授はソフトロボティクス(柔らかいロボットを扱う研究)の紹介として、柔らかいドローンのプロペラ、柔らかいロボットアーム、コンタクトレンズをつまみ上げるようなソフトハンドの3点を展示しました。
本学ブースには、企業関係者、大学・研究関係者、大学生・高専生、一般の方など2日間で延べ240名もの方々が来訪され、活発な情報交換の場となりました。
 |
| 本学出展ブースにおける展示の様子 |
令和3年7月20日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2021/07/20-1.html