研究活動の検索
研究概要(研究室ガイド)やプレスリリース・受賞・イベント情報など、マテリアルサイエンスの研究室により公開された情報の中から、興味のある情報をタグや検索機能を使って探すことができます。金沢大学・北陸先端科学技術大学院大学 第5回共同シンポジウムを開催

9月29日(月)、本学小ホールにおいて、金沢大学・北陸先端科学技術大学院大学 第5回共同シンポジウムを開催しました。
金沢大学と本学は、平成30年度より融合科学共同専攻における分野融合型研究を推進してきましたが、令和5年度からは、融合科学共同専攻の活動にとどまらず、両大学間の共同研究の発展と促進を目的に共同シンポジウムを開催しており、今回で第5回目の開催となります。
「量子科学」をテーマに開催した今回は、寺野 稔学長による開会挨拶後、金沢大学 ナノマテリアル研究所 石井 史之 教授、本学 次世代デジタル社会基盤研究領域 リム 勇仁 教授、金沢大学 理工研究域電子情報通信学系 李 睿棟 准教授、本学 ナノマテリアル・デバイス研究領域 安 東秀 准教授にそれぞれ量子科学に関する先進的な研究開発についてご講演いただき、金沢大学 和田 隆志学長の挨拶をもって閉会となりました。
また今回は、両大学の教員や学生等による量子科学に関する研究内容のポスター展示も行われ、参加者にとって多くの研究者の最新研究に触れる機会となりました。
近年、量子の特性を積極的に活用する量子技術が急速に発展しており、量子コンピュータや量子計測・センシング等の分野での応用が期待されていることから、量子科学は大変注目度が高い研究分野となっています。そのため、今回の本シンポジウムには、両大学から多くの方が参加され、講演者への質疑や研究者間の情報交換も大変活発なものとなりました。
本シンポジウムをきっかけに今まで多くの研究連携が両大学間で生じております。本シンポジウムが両大学間のさらなる研究連携発展の端緒となるよう、今後も推進していきます。

開会の挨拶をする寺野学長

講演①「『保護された量子』を探る ~計算科学が拓く新物質デザイン~」
石井 史之 教授(金沢大学 ナノマテリアル研究所)

講演②「The Past, Present, and Future of the Quantum Internet」
リム 勇仁 教授(本学 次世代デジタル社会基盤研究領域)

講演③「信頼性の高い分散型量子メタバースの実現に向けて」
李 睿棟 准教授(金沢大学 理工研究域電子情報通信学系)
講演④「ダイヤモンドNV中心を用いた、量子センシング、量子通信、量子コンピュータへの応用」
安 東秀 准教授(本学 ナノマテリアル・デバイス研究領域)

閉会の挨拶をする金沢大学 和田学長

研究者間の歓談時間の様子
令和7年10月8日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/10/08-1.htmlユネスコ無形文化遺産「金沢金箔」の薄さと輝きを生む謎を解明 ―伝統工芸と材料科学が出会う、新たな発見―
| 北陸先端科学技術大学院大学 大阪大学 |
ユネスコ無形文化遺産「金沢金箔」の薄さと輝きを生む謎を解明
―伝統工芸と材料科学が出会う、新たな発見―
【ポイント】
- 金沢金箔は、打ち延ばす工程によって箔全体を立方晶{001}集合組織(結晶粒の結晶方位が特定の方位に集中している状態)に配向させていることを解明。
- 金箔の上下に和紙を挟んで叩くことで温度上昇を防ぎ、再結晶化や回復を阻止。
- 通常は働かない{110}すべり系(原子の層がずれて動く仕組み)が特別に活性化し、箔全体の均一な薄さと輝きを実現。
| 北陸先端科学技術大学院大学 ナノマテリアル・デバイス研究領域のXU, Yuanzhe大学院生(博士後期課程)、麻生浩平講師、村田英幸教授、大島義文教授、大阪大学 超高圧電子顕微鏡センターの市川聡特任教授(常勤)の研究グループは、最新の電子顕微鏡技術により、ユネスコ無形文化遺産に登録されている金沢金箔の箔打ち工程で「再結晶や回復を防ぐ工夫」や「特殊な滑り面の働き」を確認することに成功し、金沢金箔の薄さと輝きを保つ仕組みを世界で初めて解明しました。この成果は、金沢金箔の保存・継承に貢献するだけでなく、将来的にナノ材料や高機能薄膜の開発にもつながる可能性があります。 本研究成果は、2025年9月26日 (英国標準時間)に科学雑誌「npj Heritage Science」誌のオンライン版で公開されました。 |
【研究概要】
金沢金箔(図1(a))は、寺社仏閣や伝統工芸品を飾るだけでなく、文化財の修復に不可欠な素材です。その特徴は「世界で最も薄い金属箔」(わずか100ナノメートル=髪の毛の約1/1000)という極薄性と、変わらない光沢にあります。この魅力から、ユネスコ無形文化遺産に登録されました。これまでの研究では、金沢金箔が安定した{001}集合組織を形成することは知られていましたが、その過程は不明でした。通常の金属では、箔打ちにより{110}集合組織が発達しますが、同時に再結晶や回復が起き、面内の結晶方位はランダムになると考えられていました。したがって、なぜ金沢金箔が均一で安定した{001}集合組織を示すのかは長年の謎でした。この謎を解き明かすことは、伝統工芸の継承と材料科学の進展の双方にとって重要な課題です。本研究では、最先端の技術である、電子後方散乱回折(EBSD)*1と世界最高加速電圧の超高電圧透過電子顕微鏡(UHVEM)*2 (加速電圧 2MV)を用いて、無加工で系統的に金沢金箔の分析を行いました。その結果、従来の金属学では予想されなかった「非八面体すべり系」という特殊な変形が室温の槌打ち工程で活性化し、金箔の結晶配向を整えることを明らかにしました。
本研究では、製造の中間段階にあたる「金澄(約1 μm)」と最終段階の「金箔(約100 nm)」を対象とし、電子後方散乱回折(EBSD)*1および超高電圧透過電子顕微鏡(UHVEM)*2を用いて局所的な結晶性の調査を行いました。その結果、金澄は、面内の結晶方位はランダムな{110}集合組織となっていましたが、転位密度が高く、再結晶が起きていないことがわかりました。一方、最終段階の金箔は、面内の結晶配向も高い{001}集合組織となっていました(図1(b))。ただし、転位密度は著しく増加しており、回復や再結晶が生じていないことを示唆していました。加えて、{110}面に平行な多数のすべり帯があり、その多くが直交していることを観察しました(図1(c))。この事実は、非八面体的な{110}-<110>すべり系が活性化していることを示唆しています。通常の面心立方晶(FCC)金属では、このような非八面体のすべり系が動くことはなく、金箔が特殊な変形状態にあることがわかりました。
以上の結果から考察を行い、金沢金箔は従来のFCC金属とは異なる変形メカニズムによって特異な集合組織を形成することが分かりました。具体的には、熱間圧延や焼鈍処理を施した金属材料と異なり、金沢金箔は再結晶や回復を伴わずに加工が進行しています。そのため、箔打ち過程において転位が絡み合うため、通常活性化する{111}-<110>すべり系が抑制されます。また、膜厚が転位ループのサイズに近い200 nm程度になると、転位ループの一部が表面を突き抜けるため、薄膜全体を貫通するらせん転位が多数残存します。これらのらせん転位は動きやすいため、交差すべりが生じやすくなります。この交差すべりが進化した結果、非八面体的な{110}-<110>すべり系が活性化します。この{110}-<110>すべり系は、箔打ち方向に対し、結晶方位を[110]から[001]へ徐々に回転させることができます。なお、加工時に金箔の上下に和紙を挟んで叩くことで、表面摩擦を低減するとともに温度上昇を防いでいました。つまり、この温度制御によって再結晶や回復が抑制され、上述したような特殊な変形が実現したと説明できます。
本研究の成果は、金沢金箔という無形文化遺産の科学的理解を深め、伝統技術の保存・継承に確かな裏付けを与えるものです。これにより、文化財修復における信頼性の向上や、安定供給に向けた技術支援が可能になります。さらに、極薄金属膜における特殊な変形メカニズムの知見は、構造敏感な次世代のナノ材料や高機能薄膜デバイスの開発にも応用が期待されます。具体的には、電子材料、センサー、装飾材など、従来にない性能やデザイン性を備えた新しい製品の創出につながる可能性があります。
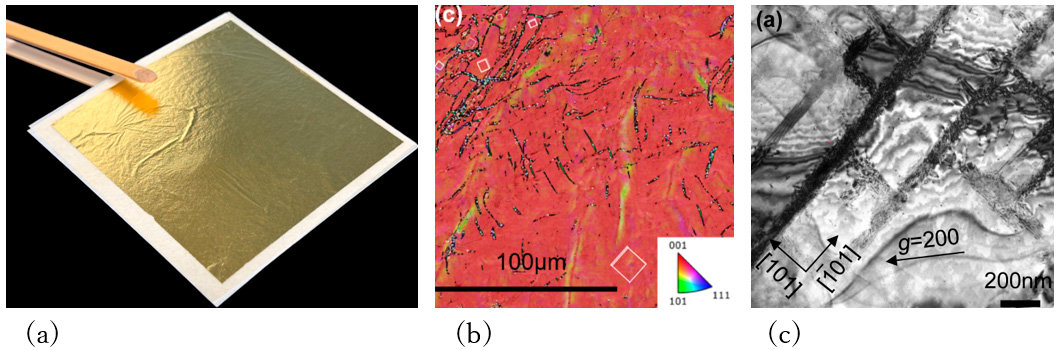
| 図1 (a) 金沢金箔の写真。(b)金沢金箔の電子後方散乱回折(EBSD)から得た方位マップ。色は、箔打ち方向に対する結晶方位を示します(赤は、[001]方位)。(c) 最終段階の金沢金箔のTEM像。黒い帯に対応する[110]方位に沿ったすべり帯は、お互いに直交しています。 |
【論文情報】
| 雑誌名 | npj Heritage Science |
| 論文名 | Deformation mechanism behind the unique texture of Kanazawa gold leaf |
| 著者 | Yuanzhe Xu, Satoshi Ichikawa, Kohei Aso, Hideyuki Murata, and Yoshifumi Oshima |
| 掲載日 | 2025年9月26日 |
| DOI | 10.1038/s40494-025-02055-5 |
【用語説明】
材料表面で後方に散乱した電子回折の菊池パターンを解析し、ナノメートルの分解能で結晶方位、組織、転位密度のマップを得ることができます。
通常の透過電子顕微鏡の加速電圧が100-200 kVであるのに対し、超高電圧透過電子顕微鏡の加速電圧は、2MVと一桁大きい。そのため、入射電子の透過能が高く、厚い試料の内部構造を観察することができます。本研究の金箔、金澄を観察用に薄片加工することなくそのまま観察することができます。
令和7年10月7日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/10/07-1.html2025年度JST戦略的創造研究推進事業(CREST・ACT-X)に採択
国立研究開発法人科学技術振興機構(JST)の「戦略的創造研究推進事業(CREST・ACT-X)」において、本学の研究提案からCREST1件、ACT-X1件が採択されました。
採択者および採択課題は以下のとおりです。
【CREST】
研究代表者:ナノマテリアル・デバイス研究領域 ホ アン ヴァン教授
研究課題名:Cross-X: AI 駆動型の触覚・近接センシングおよび適応的コンポーネントによる、多様な形態に対応した身体知能の実現
研究領域:実環境知能システムを実現する基礎理論と基盤技術の創出
研究概要:
本研究は、全身にわたるマルチモーダルセンシングを、適応的形態、事前学習知識、継続学習と統合し、迅速かつ頑健に応答できる物理知能モジュールを構築することを目的とする。さらに、各モジュールにおける局所的なセンシング・駆動から、ロボット全体における統合的な機能発現へと至る「身体知能」の科学的基盤を確立し、次世代ロボティクスの新しいパラダイムを切り拓くことが期待される。
【ACT-X】
研究代表者:コンピューティング科学研究領域 鎌田 斗南助教
研究課題名:連続と離散を横断する計算基盤の確立と実問題への接続
研究領域:次世代 AI を築く数理・情報科学の革新
研究概要:
近年の計算機科学の発展により、実社会の多様な課題を計算機で扱うことが可能となった。しかし、社会課題の多くは本来的に連続的であり、計算機が扱う離散的な近似との間には根本的な差異がある。そのため、問題の困難性と容易性の境界を理解するためには、連続性を計算機上で扱う新たな枠組みが必要である。本研究では、実社会の問題を実数変数の決定問題としてモデル化し、その計算量解析を通じて、体系的な数理基盤を確立する。
CREST:
CRESTは、我が国が直面する重要な課題の克服に向けて、独創的で国際的に高い水準の目的基礎研究を推進し、社会・経済の変革をもたらす科学技術イノベーションに大きく寄与する、新たな科学知識に基づく創造的で卓越した革新的技術のシーズ(新技術シーズ)を創出することを目的とするネットワーク型(チーム型)研究です。
「実環境知能システムを実現する基礎理論と基盤技術の創出」領域では、実環境・物理空間における多様かつ予測困難な状況変化に対して柔軟かつ安全に対応できる知能システム(Physical AI)の構築に向けた基礎学理と基盤技術の創出を目指します。AI とロボティクスやIoT との連携により AI に身体性を付与するなど、知能、機械、数理、制御、計算、通信、神経科学等の学術分野の融合による高度な知能システム構築に資する研究開発を推進します。
▶ 戦略的創造研究推進事業(CREST)
ACT-X:
ACT-Xは、我が国が直面する重要な課題の克服に向けて、優れた若手研究者を発掘し育成することを目的としたネットワーク型(個人型)研究です。
「次世代AIを築く数理・情報科学の革新」領域では、既存のAI技術の限界・困難を克服するため、AI 技術・情報科学および数学・数理科学、その他様々な研究分野の融合・応用による AI技術の高度化や適用範囲の拡大などの、挑戦的な研究課題に取り組む若手研究者を支援することで、新しい価値の創造につながる研究開発を推進します。
▶ 戦略的創造研究推進事業(ACT-X)
令和7年9月29日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/09/29-2.html文部科学省マテリアル先端リサーチインフラ(ARIM)シンポジウムを本学で開催
9月11日(木)、9月12日(金)の2日間、本学にて、「ナノ物性の可視化と理解:AIと拓くマテリアル解析の新展開」シンポジウムを開催しました。文部科学省マテリアル先端リサーチインフラ(ARIM)事業の一環として開催された本シンポジウムには、オンラインと現地合わせて150名を超える参加者が集まり、活発な議論と情報交換が行われました。
今回のシンポジウムでは、電子顕微鏡(TEM)像や分光データを活用したAIによるマテリアル解析の新たな展開をテーマに、最前線で活躍する研究者が講演を行いました。ARIM事業では、TEM画像や分光データの収集・蓄積を進めており、今後のデータ公開・共用に向けた準備が進んでいます。
【プログラム概要】
1日目(9月11日)
初日は、本学先端科学技術研究科副研究科長・大島義文教授の挨拶に続き、以下の招待講演が行われました。
①武藤俊介 教授(名古屋大学)
TEM応用における計測インフォマティクスのビジョンと課題について講演
②志賀元紀 教授(東北大学)
微細構造計測データに対する機械学習の応用について紹介
③溝口照康 教授(東京大学)
生成AIを活用した計測データからの情報抽出と物質設計について講演
④木本浩司 センター長(物質・材料研究機構(NIMS))
4D-STEMと教師なし機械学習によるナノ領域構造解析について発表
2日目(9月12日)
⑤ダム ヒョウ チ 教授(本学共創インテリジェンス研究領域)
Data-Driven AIによる材料動態の可視化について講演
⑥井原史朗 助教(九州大学)
情報科学を援用したナノスケール幾何学情報の抽出と3次元可視化について紹介
⑦麻生浩平 講師(本学ナノマテリアル・デバイス研究領域)
画像処理を活用した電子顕微鏡画像からのナノ材料情報の抽出について発表
閉会にあたり、本学ナノマテリアル・デバイス研究領域 高村由起子教授(ARIM業務責任者)が総括と今後の展望を述べ、盛況のうちに終了しました。
終了後、参加者からは、「生成AIの知見が研究に活用できそうだと感じた」、「結晶粒界の可視化が非常に興味深かった」、「実験家の視点に近い取り組みが印象的だった」などの感想が寄せられました。
今回のシンポジウムは、TEMデータを活用したデータ駆動型研究の可能性を広く共有する貴重な機会となりました。本学は今後もARIM事業を通じて、マテリアル解析の新展開を支援していきます。

開会の挨拶をする
大島義文教授

①武藤俊介教授
(名古屋大学)

②志賀元紀教授
(東北大学)

③溝口照康教授
(東京大学)

④木本浩司センター長
(NIMS)
⑤ダムヒョウチ教授
(本学)

⑥井原史朗助教
(九州大学)

⑦麻生浩平講師
(本学)

閉会の挨拶をする
高村由起子教授
令和7年9月29日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/09/29-1.html特殊なダイヤモンドの針を開発し超高速で変化する電場の局所計測に成功
 |
| 国立大学法人筑波大学 国立大学法人 慶應義塾大学 |
特殊なダイヤモンドの針を開発し
超高速で変化する電場の局所計測に成功
NV中心と呼ばれる格子欠陥を導入したダイヤモンドを原子スケールの空間分解能を持つ原子間力顕微鏡(AFM)の探針(プローブ)に用い、二次元層状物質の表面近傍の電場をフェムト秒(1000兆分の1秒)・ナノメートル(10億分の1メートル)の時空間分解能で計測することに成功しました。
| ダイヤモンドの結晶中に不純物として窒素(Nitrogen)が存在すると、すぐ隣に炭素原子の抜け穴(空孔:Vacancy)ができることがあります。これをNitrogen-Vacancy(NV)中心と言います。そして、NV中心を導入したダイヤモンドに電界を加えると、その屈折率が変化するようになります。これは電気光学(EO)効果と呼ばれる現象で、ダイヤモンド単体では実現していませんでした。 本研究チームはこれまでに、NV中心を導入した高純度ダイヤモンドに1000兆分の1秒という極めて短時間だけパルス光を放出するフェムト秒レーザーを照射し、ダイヤモンドのEO効果を計測することで、ダイヤモンドの格子振動ダイナミックスを動的に高感度に検出することに成功しています。このことは、ダイヤモンドが超高速応答するEO結晶として利用可能で、電場を検出する探針(ダイヤモンドNVプローブ)となり得ることを示しています。 そこで本研究では、NV中心を導入したダイヤモンドの超高速EO効果と、原子スケールの空間分解能を有する原子間力顕微鏡(AFM)技術とを融合し、フェムト秒(fs=1000兆分の1秒)の時間分解能とナノメートル(nm=10億分の1メートル)の空間分解能で局所的な電場のダイナミックスを測定できる、時空間極限電場センシング技術を開発しました。そして、このセンシング技術を用いることで、二次元の原子層が層状に重なった二次元層状物質であるセレン化タングステン(WSe2)試料の表面近くの電場を500 nm以下かつ100 fs以下の時空間分解能でセンシングできました。 ダイヤモンドNVプローブはスピンや温度の変化にも感度があるため、本研究成果は、電場の検出に加え、磁場や温度を検出するためのセンシング技術としても展開されることが期待されます。 |
【研究代表者】
筑波大学数理物質系
長谷 宗明 教授
北陸先端科学技術大学院大学ナノマテリアル・デバイス研究領域
安 東秀 准教授
慶應義塾大学理工学部
ポール フォンス 講師(研究当時、同大学同学部電気情報工学科教授)
【研究の背景】
ダイヤモンド中の不純物には窒素やホウ素などさまざまな種類があります。その中でも、点欠陥に電子や正孔が捕捉され、発光を伴う種類のものはダイヤモンドを着色させるため、「色中心:カラーセンター」と呼ばれます。色中心には周辺環境の温度や磁場の変化を極めて敏感に検知して量子状態が変わる特性があり、温度や電場を読み取る量子センサー注1)として用いられています。
量子センサーの中でも、ダイヤモンドに導入した窒素―空孔(NV)中心注2)と呼ばれる複合欠陥を用いたセンサーは、まだまだ発展途上の技術ですが、高空間分解能・高感度が要求される細胞内計測やデバイス評価装置のセンサーへの応用など、新しい可能性が期待されています。
本研究チームは、フェムト秒(1000兆分の1秒)の時間だけ近赤外域の波長で瞬くフェムト秒超短パルスレーザー注3)を用い、NV中心を導入したダイヤモンドの電気光学(EO)効果注4)を実時間分解計測することで、ダイヤモンドの格子振動ダイナミックスを動的に高感度に検出することに成功しています参考文献 a)。このことは、ダイヤモンドが超高速応答するEO結晶になり、電場検出の探針(プローブ)となり得ることを示すものです。
これまでもダイヤモンドを原子間力顕微鏡(AFM)注5)と組み合わせた電場センシングの試みはなされていましたが、局所ダイナミックスを動的に評価できる手法はほとんどありませんでした。特に時間分解能に関しては、発光測定に基づく従来の手法ではナノ秒程度が限界であり、ピコ秒以下の超高速時間分解能に関しては、全く開拓されていませんでした。
【研究内容と成果】
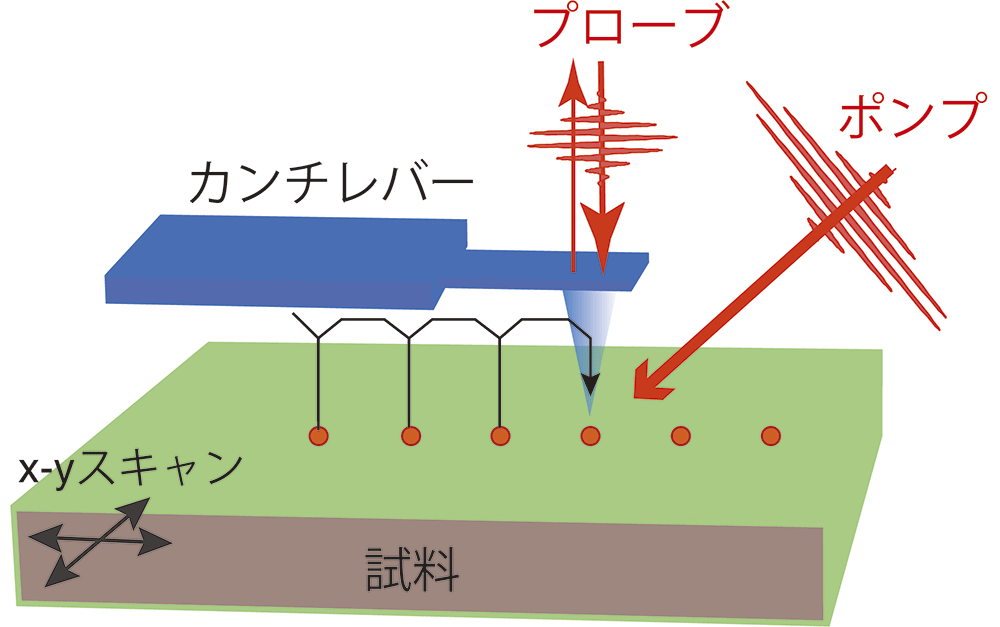
本研究では、量子光学(フェムト秒超短パルスレーザーを用いたダイヤモンドのEO効果)と走査プローブ顕微鏡(SPM)の一種である原子間力顕微鏡(AFM)技術を融合することで、光の回折限界を超える空間分解能に加えて、今までの検出限界を超える超高速時間分解能で局所的な電場計測を実現することを目指しました(図1)。
極めて不純物が少ない高品質のダイヤモンド結晶の表面近傍(深さ40nm)に、密度を制御したNV中心を導入し、そのダイヤモンド結晶をレーザーカットおよび集束イオンビーム(FIB)技術注6)を駆使することで、先端径が500 nm以下のダイヤモンドNVプローブに加工することに成功しました。このダイヤモンドNVプローブを、フェムト秒超短レーザーを組み込むことが可能な、ピエゾ抵抗効果注7)に基づく自己センシング方式注8)のAFMのカンチレバーに取り付けました(図2)。
このシステムを用いて、まずガリウムヒ素(GaAs)半導体基板の表面電場を調べました。フェムト秒超短パルスレーザーの出力光をビームスプリッタで約10対1に分岐し、強い方を励起のためのポンプ光、弱い方を探索のためのプローブ光とします。電子が電流を運ぶn型GaAs試料は高強度のポンプ光で励起され、プローブ光はダイヤモンドNVプローブに入射されます(図3a)。まず、ダイヤモンドNVプローブの有無による時間分解EO信号の検出感度を確認するため、ダイヤモンドNVプローブを用いないマクロ計測により時間分解EO信号を計測したところ、励起直後(Time delay=時間遅延0 ps)に立ち上がり、数ps(ps=1兆分の1秒)以内に緩和しポンプ光を当てる前に戻る信号が得られました(図3b)。またNVセンターを導入したダイヤモンドNVプローブを通じて、n型GaAsの表面電場を検出することに成功しました(図3c)。ダイヤモンドNVプローブの導入によりEO信号の大きさは約1/42に減少しましたが、局所計測に成功したと言えます。
さらに二次元層状物質注9)であるセレン化タングステン(WSe2)単結晶をシリコン基板上に転写した試料を用いて実験を行いました。このWSe2試料では、場所によって結晶の厚さが異なっていますが、光学顕微鏡で銀白色のバルク(Bulk)結晶(厚さが10原子層以上の結晶)を見つけ、このバルク結晶と接する紫色の単層(1 ML)部分との界面に着目しました(図4a)。この厚さの異なる界面を用いて、局所的な表面電場の計測を行ったところ、単層部分とバルク部分のキャリア特性を反映した表面電場信号を、500 nm以下かつ100 fs以下の時空間分解能でセンシングすることに成功しました(図4a,b)。また時間分解EO信号の減衰を指数関数を用いてフィッティング(モデル化)したところ、単層部分では約200フェムト秒で緩和する成分のみが観測されました。一方、バルク部分では、この成分に加えて、約2psで緩和する遅い成分の寄与があることが分かりました(図4c)。このことは、単層部分では電場は基板との相互作用などで高速に緩和するのみなのに対し、バルク部分では、表面電場と結合したキャリアのバンド内緩和やバレー間緩和注10)が寄与していることを示しています。n型GaAsの時間分解EO信号による電場検出感度を見積もると、約100 V/cm/![]() (Hzは周波数)となりました。これは発光測定に基づく従来の手法で得られたマイクロ秒時間領域でのDC(直流)電場センシングと同等の検出感度を達成したことになります。最近のマイクロ秒時間領域でのAC(交流)電場センシングに関する検出感度には2桁及びませんが、本手法ではDC(直流)電場センシングと同等の検出感度で500 nm以下かつ、100フェムト秒というマイクロ秒を遙かに凌ぐ高い時空間分解能が得られることが示されたと言えます。
(Hzは周波数)となりました。これは発光測定に基づく従来の手法で得られたマイクロ秒時間領域でのDC(直流)電場センシングと同等の検出感度を達成したことになります。最近のマイクロ秒時間領域でのAC(交流)電場センシングに関する検出感度には2桁及びませんが、本手法ではDC(直流)電場センシングと同等の検出感度で500 nm以下かつ、100フェムト秒というマイクロ秒を遙かに凌ぐ高い時空間分解能が得られることが示されたと言えます。
【今後の展開】
今回開拓した時空間極限センシング技術は、例えば炭化ケイ素(SiC)などのパワー半導体材料や燃料電池材料内での局所電場検知、トポロジカル絶縁体における局所電場検知など、基礎物理・化学のための基盤技術となることが期待されます。また、NV中心を含むダイヤモンドNVプローブはスピンや温度の変化にも感度があるため、本研究のアプローチは、電場の検出に加え、磁場や温度を検出するためのセンシング技術としても展開可能であると言えます。例えばレーザー医療や分子レベルでの細胞の計測や制御を通じて、癌の治療をはじめとする量子生命科学の分野にも波及しうる革新的な展開が期待されます。
【参考図】
| 図1 本研究で行なった実験の概要図 ダイヤモンドNVプローブを用いた超高速ポンプ・プローブ電場センシング測定の概略図。試料上の各指定点においてAFMプローブを垂直に接近・後退させる「ピンポイントモード」で測定を行った。また試料はピエゾスキャナーを用いてx-y方向に走査される。 |
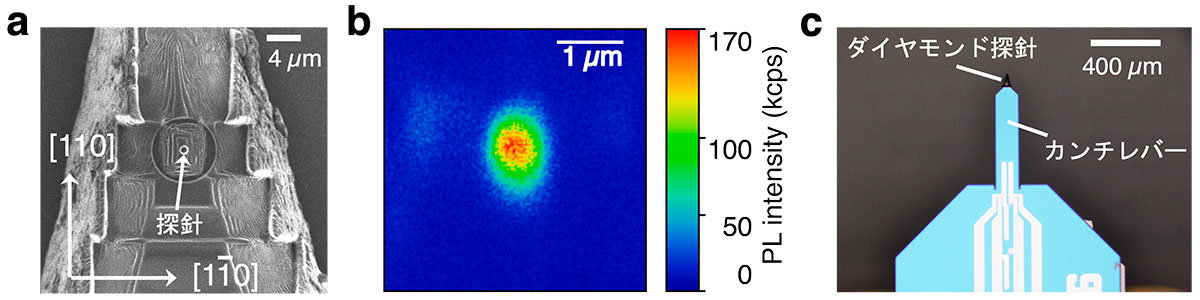
| 図2 本研究で作製したダイヤモンドNVプローブ概要図 (a) FIBで作製したダイヤモンドNVプローブ(探針)の走査型イオン顕微鏡像。マイクロメートルサイズに加工されたダイヤモンド結晶の一部が探針となっている。(b) ダイヤモンドNVプローブの探針部分のフォトルミネッセンス画像。赤色の部分から探針の直径が500 nm以下であることが分かる。(c)カンチレバーに取り付けたダイヤモンドNVプローブの光学顕微鏡像。カンチレバーは自己センシング方式用の回路部分の上部に位置しており、その先端に探針部分を含むダイヤモンドNVプローブが取り付けられている。 |
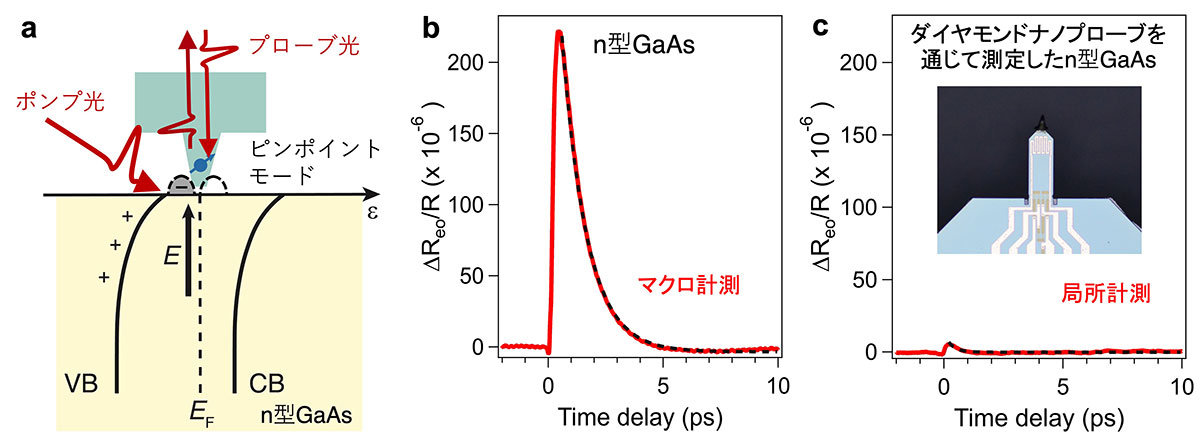
| 図3 ダイヤモンドNVプローブを用いたn型GaAs表面の電場センシング (a)ダイヤモンドNVプローブ先端近傍の表面バンド曲げと接触モードの配置図。表面状態はフェルミエネルギー(EF)を示すベル形状の破線で表され、下側のバンドは電子(-)で占有されている。VBは価電子帯、CBは伝導帯を示す。(b)ダイヤモンドNVプローブを用いないマクロ計測によるn型GaAsウェハーからの時間分解電気光学信号。(c)ダイヤモンドNVプローブを用いたn型GaAsからの局所的時間分解電気光学信号。(b)のマクロ計測の場合に比べてEO信号の大きさは約1/42になっているが、検出感度が十分であることが確認された。 |
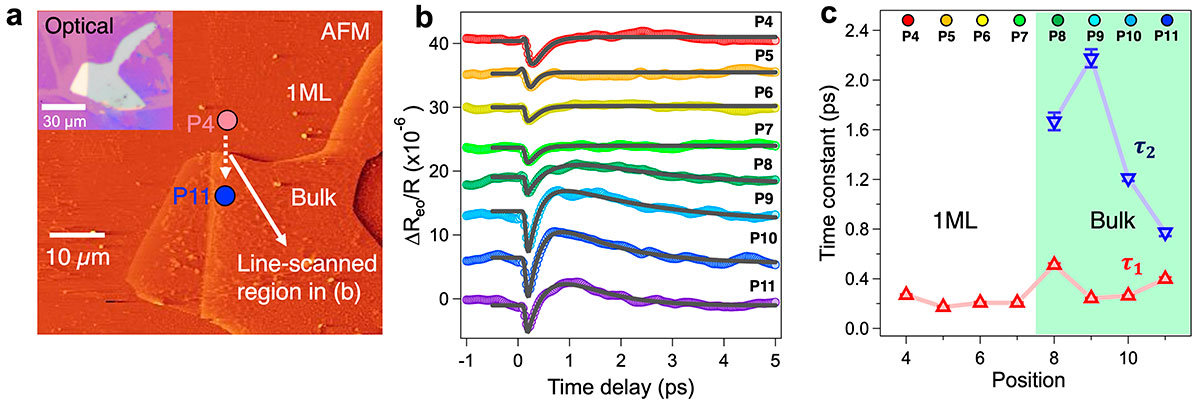
| 図4 WSe2のEO信号の時空間測定 (a) ダイヤモンドNVプローブを用いた60 µm ×60 µm領域のトポグラフ画像。色の薄い部分がバルク(Bulk)結晶である。左上の挿入図は光学顕微鏡像であり、銀白色の部分はバルク(Bulk)結晶である。 局所計測では、単層(1ML)領域(P4)からバルク(Bulk)領域(P11)までを500 nmステップで計測する。(b)ダイヤモンドNVプローブを用いて得られた局所的な時間分解電気光学信号。P4からP11に行くに従い、単層(1ML)からバルク(Bulk)領域を測定している。図(b)の黒実線は、単一指数関数(単層=1ML領域のデータについて)または二重指数関数(バルク領域のデータについて)を用いたフィッティング(モデル化)を示す。(c) P4からP11の異なる位置における500 nmステップで得られた時間分解電気光学信号へのフィッティングにより得られた緩和時間定数。エラーバーは標準偏差を示す。 |
【用語解説】
量子化した準位や量子もつれなどの量子効果を利用して、磁場、電場、温度などの物理量を超高感度で計測する手法のこと。
ダイヤモンドは炭素原子から構成される結晶だが、結晶中に不純物として窒素(Nitrogen)が存在すると、すぐ隣に炭素原子の抜け穴(空孔:Vacancy)ができることがある。この窒素と空孔が対になった「NV(Nitrogen-Vacancy)中心」はダイヤモンドの着色にも寄与する色中心と呼ばれる格子欠陥となる。NV中心には周辺環境の温度や磁場の変化を極めて敏感に検知して量子状態が変わる特性があり、この特性をセンサー機能として利用することができる。このため、NV中心を持つダイヤモンドは「量子センサー」と呼ばれ、次世代の超高感度センサーとして注目されている。
パルスレーザーの中でも特にパルス幅(時間幅)がフェムト秒(1000兆分の1秒)以下の極めて短いレーザーのこと。光電場の振幅が極めて大きいため、2次や3次の非線形光学効果を引き起こすことができる。
物質に電場を加えると、電場の強度に応じて物質の屈折率が変化する効果のこと。
先端が鋭い探針で試料の表面を走査し、探針と表面との間に働く微少な力を測定して表面構造を原子スケールの高分解能で観察することができる顕微鏡のこと。AFM探針は、バネのようにしなるカンチレバーの先端に取り付けられており、コンタクトモードでは、この探針と試料表面を微小な力で接触させ、カンチレバーのたわみ量が一定になるように探針・試料間距離をフィードバック制御しながらX―Y方向(水平方向)に走査することで、表面形状を画像化できる。
イオンビーム(荷電しているイオンを高電界で加速したもの)を細く絞ったものである。物質の微細加工、蒸着、観察などの用途に用いられる。
半導体材料などに機械的なひずみ(力による変形)を与えたとき、材料の電気抵抗が変化する効果のこと。
通常のAFMでは、レーザー光をカンチレバー背面に照射し、反射したレーザービームの位置変化を位置センサーで計測することで、カンチレバーのたわみ量(表面構造によりたわんだ量)を読み取る。カンチレバーのたわみ信号を光で読み取ることから、これを光てこ方式と呼ぶ。一方、自己センシング方式のAFMでは、光てこ方式のようにレーザーと一センサーを必要とせず、ピエゾ抵抗効果などのカンチレバー自身の物理量の変化からカンチレバーのたわみ量を読み取ることができる。
共有結合が二次元方向だけに伸びている結晶のこと。原子一層レベルの二次元原子層が、ファンデルワールス力で積層して三次元結晶を形成している。炭素の二次元原子層であるグラフェンが積層したグラファイト、近年盛んに研究されるようになった遷移金属カルコゲナイドなどがある。本研究で調べたセレン化タングステン(WSe2)も遷移金属カルコゲナイドである。
半導体などにおいて、バレーとは電子バンドの極小点を指す。異なるバレー間にキャリアが散乱(遷移)することでエネルギーを失う緩和過程をバレー間緩和と呼ぶ。
【研究資金】
本研究は、科研費による研究プロジェクト(25H00849, 22J11423, 22KJ0409, 23K22422, 24K01286, 24H00416, 23H00264)、および国立研究開発法人 科学技術振興機構 戦略的創造研究推進事業CREST「ダイヤモンドを用いた時空間極限量子センシング」(研究代表者:長谷 宗明)(JPMJCR1875)の一環として実施されました。
【参考文献】
a) T. Ichikawa, J. Guo, P. Fons, D. Prananto, T. An, and M. Hase, 2024, Cooperative dynamic polaronic picture of diamond color centers. Nature Communications. 15, 7174 (10.1038/s41467-024-51366-x).
【掲載論文】
| 題名 | An ultrafast diamond nonlinear photonic sensor. (超高速ダイヤモンド非線形光センサー) |
| 著者名 | D. Sato, J. Guo, T. Ichikawa, D. Prananto, T. An, P. Fons, S. Yoshida, H. Shigekawa, and M. Hase |
| 掲載誌 | Nature Communications |
| 掲載日 | 2025年9月25日 |
| DOI | 10.1038/s41467-025-63936-8 |
令和7年9月26日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/09/26-1.html令和7年度 第2回 超越量子未来アリーナ ネオ・エクセレントコアセミナー「Quantum Repeaters and Aggregated Channels: Building Blocks for Scalable Quantum Networks」
セミナーを下記のとおり開催しますので、ご案内します。
| 日 時 | 令和7年9月2日(火) 15:00~16:00 |
| 場 所 | 知識科学系講義棟 2階 中講義室 |
| 講演者 | Dr. Nicolo Lo Piparo Visiting Researcher, OIST |
| 講演題目 | Quantum Repeaters and Aggregated Channels: Building Blocks for Scalable Quantum Networks ※講演要旨はフライヤーのとおり |
| 使用言語 | 英語 |
| お問合せ先 | 超越量子未来アリーナ 教授 リム 勇仁(E-mail:ylim |
● 参加申込・予約は不要です。直接会場にお越しください。
人と安全に協働できる"ソフトロボットリンク"を開発 触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
人と安全に協働できる"ソフトロボットリンク"を開発
触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
【ポイント】
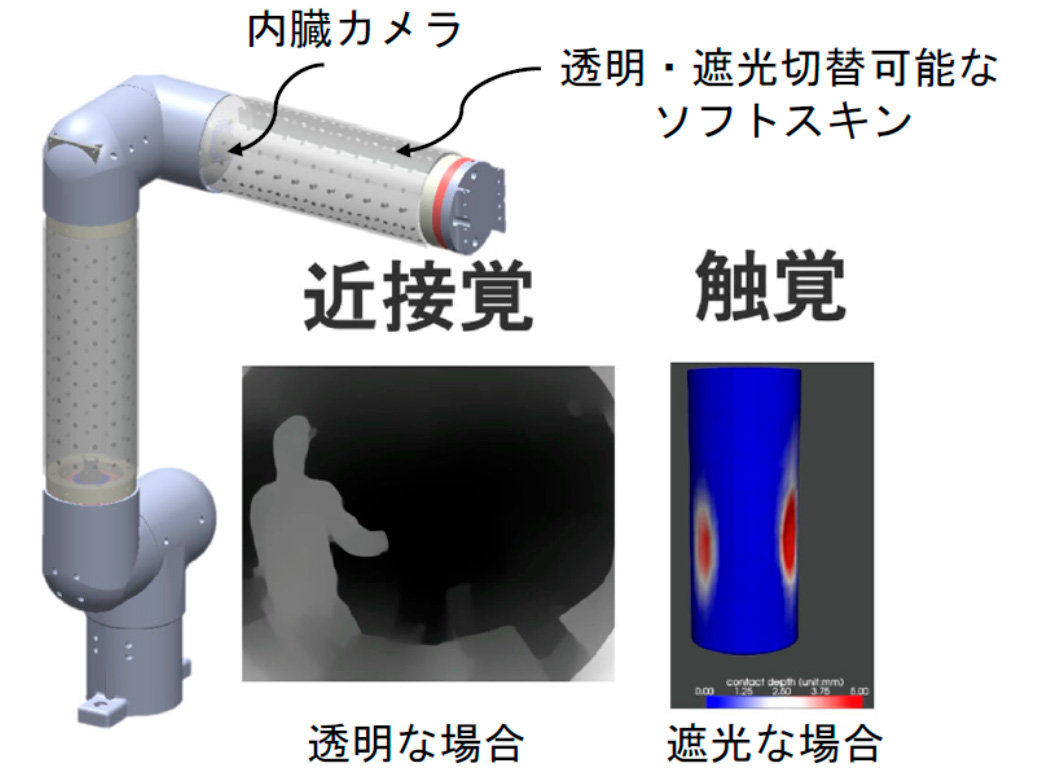
- 透明・不透明を切り替えられるソフトスキンと視覚センサーを用い、近接センシングとスキン変形の解析による触覚センシングを備えたマルチモーダルソフトセンシング技術「ProTac」を開発
- 市販ロボットアームにも取り付け可能
- 従来の剛体リンクでは困難とされる、接触の多い環境下での動作制御が可能
- 農業や介護など、人とロボットが協働する作業への応用に期待
- AI駆動型センシングフュージョン技術
| 北陸先端科学技術大学院大学 ナノマテリアル・デバイス研究領域のクアン・ハン・ルウ研究員、ホ・アン・ヴァン教授らの研究チームは、透明・不透明を電圧により切り替えられるソフト素材と視覚センシング技術を融合し、近接・触覚の両モードを切り替えて検知できるマルチモーダルソフトセンシング技術「ProTac」を世界で初めて開発しました。ProTacを用いたソフトロボットリンクは、周囲の物体を検知する近接センシングとマーカー画像の変化から触覚情報を読み取る触覚センシングを一台で切り替えて行うことができ、人との接触が多い環境で安全に動作制御が可能です。なお、本研究成果は、2025年7月28日にIEEE Transactions on Robotics(T-RO)に掲載されました。 |
【研究概要】
近年、人と同じ空間で安全かつ柔軟に作業できるロボットのニーズが高まっています。これに応えるため、私たちの研究チームは、ソフト機能材料と画像や映像から情報を取得・解析する技術である視覚センシング技術を融合した新しいマルチモーダルソフトセンシング技術「ProTac」(図1)を開発しました。
ProTacは、電圧をかけることで透明・不透明を切り替えられるポリマーディスパースド液晶(PDLC)フィルム注1)と内蔵カメラを組み合わせています。透明時には視界を活用して周囲の物体の近接を検知し、不透明時にはマーカー画像の変化から触覚情報の取得を実現します。また、最新の深層学習ベースの視覚アルゴリズムを用いることで、安定したリアルタイムセンシングが可能です。
図1:ProTacのイメージ図
この技術を用いたソフトロボットリンクは、市販のロボットアームやカスタム製作されたソフトロボットにも取り付け可能で、障害物検知に基づく速度調整や接触時の反射動作など、多様な制御戦略を実現します。ProTacを備えたソフト多機能センシングアームは、人とロボットが密に連携する場面や、従来の剛体リンクでは困難な動作制御において高い性能を示しました。
今後は、この技術を手足や胴体などロボットの各部位に応用し、高機能なマルチモーダルスキンを備えたヒューマノイドロボットの実現が期待されます。また、農業、家庭サービス、介護分野など、幅広い分野での応用も見込まれます。
【研究資金】
本研究は、日本学術振興会 科学研究費補助金 特別研究員奨励費(24KJ1203)、国立研究開発法人 科学技術振興機構(JST)さきがけ(JPMJPR2038)による財政的支援を受けて実施されました。
【論文情報】
| 掲載誌 | IEEE Transactions on Robotics |
| 論文タイトル | Vision-based Proximity and Tactile Sensing for Robot Arms: Design, Perception, and Control |
| 著者 | Quan Khanh Luu, Dinh Quang Nguyen, Nhan Huu Nguyen, Nam Phuong Dam, Van Anh Ho |
| 掲載日 | 2025年7月28日 |
| DOI | 10.1109/TRO.2025.3593087 |
【用語説明】
電圧により透明・不透明を切り替えられる液晶材料。柔軟であり、ディスプレイやスマートウィンドウなどの光の透過を制御する用途に使用される。
令和7年8月22日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/08/22-1.html大学見本市2025~イノベーション・ジャパンに出展
8月21日(木)・22日(金)の2日間、東京ビッグサイト(東京都江東区有明)で国内最大規模の産学マッチングイベントである「大学見本市2025~イノベーション・ジャパン」が開催されます。
本学からは大学等シーズ展示に村田教授が出展します。
ご来場の際にはぜひお立ち寄りください。
| 日 時 | 8月21日(木) 10時00分~17時00分 8月22日(金) 10時00分~17時00分 |
| 会 場 | 東京ビッグサイト 西展示棟 西4ホール(東京都江東区有明3丁目11番1) |
| 大学等 シーズ展示 |
先端科学技術研究科 先端科学技術専攻 村田 英幸 教授 【小間番号】 I-43 |
詳細はこちらをご覧ください。
・大学見本市2025~イノベーション・ジャパン公式サイト
https://innovationjapan.jst.go.jp/
第10回研究科セミナー(ナノマテリアル・デバイス研究領域)「機能性化合物の分子設計と社会実装」
| 日 時 | 令和7年9月19日(金)15:30~17:00 |
| 場 所 | 知識科学講義棟2棟 中講義室 |
| 講演題目 | 機能性化合物の分子設計と社会実装 |
| 講演者 | コニカミノルタ株式会社 技術開発本部 技術顧問 北 弘志 氏 |
| 使用言語 | 日本語 |
| お問合せ先 | 北陸先端科学技術大学院大学 ナノマテリアル・デバイス研究領域 教授 村田 英幸(E-mail:murata-h |
● 参加申込・予約は不要です。直接会場にお越しください。
第5回 金沢大学・北陸先端科学技術大学院大学 共同シンポジウム

| 開催日時 | 令和7年9月29日(月)13:30~17:00 |
| 会 場 | 北陸先端科学技術大学院大学 マテリアルサイエンス系講義棟1階 小ホール ※オンラインにて同時配信(ハイフレックス開催) |
| 対 象 | 両大学の教職員・学生 |
| テーマ | 量子科学 |
| プログラム | 13:30~ オープニング(本シンポジウムの趣旨説明等) 13:35~ 開会挨拶 北陸先端科学技術大学院大学 寺野 稔 学長 13:40~14:20 ≪講演1≫ *講演:30分、質疑応答:10分 講演者:石井 史之 教授(金沢大学 ナノマテリアル研究所) 講演タイトル:『保護された量子』を探る ~計算科学が拓く新物質デザイン~ 14:25~15:05 ≪講演2≫ *講演:30分、質疑応答:10分 講演者:リム 勇仁 教授(本学 次世代デジタル社会基盤研究領域) 講演タイトル: The Past, Present, and Future of the Quantum Internet 15:05~15:25 休憩 15:25~16:05 ≪講演3≫ *講演:30分、質疑応答:10分 講演者:李 睿棟 准教授 (金沢大学 理工研究域電子情報通信学系) 講演タイトル:信頼性の高い分散型量子メタバースの実現に向けて 16:10~16:50 ≪講演4≫ *講演:30分、質疑応答:10分 講演者:安 東秀 准教授 (本学 ナノマテリアル・デバイス研究領域) 講演タイトル:ダイヤモンドNV中心を用いた、量子センシング、量子通信、量子コンピュータへの応用 16:50~ 閉会挨拶 金沢大学 和田 隆志 学長 <*終了後~18:00位まで 量子科学の先端的研究に係るポスター展示および研究者間の歓談時間> |
| 参加申込 | 下記申込み用フォームからお申込みください。 https://forms.cloud.microsoft/r/KkNMfyMe7S ※会場での参加、オンライン参加ともに事前申込みが必要です。 ※オンライン参加の方には、アクセス用URLをご連絡いただいたメールアドレスに後日送信いたします。 |
| 本件 問合せ先 |
研究推進課 学術研究推進係 TEL:0761-51-1907 / 1912 E-mail:suishin@ml.jaist.ac.jp |
文部科学省マテリアル先端リサーチインフラ(ARIM)シンポジウム「ナノ物性の可視化と理解 : AIと拓くマテリアル解析の新展開」
| 日 時 | 令和7年9月11日(木)13:30~17:00 令和7年9月12日(金) 9:30~12:10 |
| 場 所 | 北陸先端科学技術大学院大学 知識科学系講義棟2F 中講義室 (ハイブリッド開催) |
| 定 員 | 90名(事前登録制) イベントへのご参加は、できるだけ事前登録をお願いしています。事前にご登録いただくことで、スムーズな受付や資料の準備が可能となります。 ただし、事前登録が難しい場合でも、当日現地での参加も可能です。直接会場にお越しいただければ、スタッフがご案内しますのでご安心ください。 |
| 参加費 | 無料 |
| 参加申込み フォーム |
https://forms.gle/CK6NjxhuR4GLpBpE9 |
| 参加申込締切 | 令和7年9月8日(月) |
| 概 要 | 文部科学省マテリアル先端リサーチインフラ(ARIM)事業では、現在、電子顕微鏡(TEM)像や分光データの収集・蓄積を進めており、近くそのデータの公開と共用が始まります。このシンポジウムでは、データ駆動型研究の分野でご活躍の先生方に、TEMから創出されたデータから、どのような隠された情報が読み取れるのか、その利活用の可能性を提示していただきます。このシンポジウムが、これからTEMデータを使用したデータ駆動型研究を推進することを考えている方々の一助となることを願っております。 |
| プログラム | ■ 1日目 9/11 (木) 13:30-13:40 開会の辞 大島 義文(北陸先端科学技術大学院大学 先端科学技術研究科 教授/副研究科長) 13:40-14:30 計測インフォマティクスのTEM応用へのビジョンと問題点 武藤 俊介(名古屋大学 未来材料・システム研究所 高度計測技術実践センター 電子顕微鏡計測部 教授) 14:30-15:20 微細構造計測データのための機械学習 志賀 元紀(東北大学 未踏スケールデータアナリティクスセンター 教授) 15:50-16:40 生成AIを活用した計測データからの情報抽出と物質設計 溝口 照康(東京大学 生産技術研究所 教授) 16:40-17:30 4D-STEMと教師無し機械学習によるナノ領域構造解析 木本 浩司(物質・材料研究機構 マテリアル基盤研究センター マテリアル基盤研究センター センター長) ■ 2日目 9/12 (金) 9:30-10:20 Data-Driven AI for Visualizing Materials Dynamics HIEU CHI DAM(北陸先端科学技術大学院大学 先端科学技術研究科 教授) 10:20-11:10 情報科学の援用によるナノスケール幾何学情報の抽出および3次元可視化 井原 史朗(九州大学 先導物質化学研究所 助教) 11:10-12:00 画像処理を活用した電子顕微鏡画像からのナノ材料情報の抽出 麻生 浩平(北陸先端科学技術大学院大学 先端科学技術研究科 講師) 12:00-12:05 閉会の辞 高村 由起子(北陸先端科学技術大学院大学 先端科学技術研究科 教授/マテリアル先端リサーチインフラ スポーク機関 業務主任者) |
| 主 催 | 主催/国立大学法人 北陸先端科学技術大学院大学 (文部科学省 マテリアル先端リサーチインフラ スポーク機関) 協賛/国立大学法人 東海国立大学機構 名古屋大学 (文部科学省 マテリアル先端リサーチインフラ 次世代バイオマテリアルハブ機関) 協賛/国立大学法人 九州大学 (文部科学省 マテリアル先端リサーチインフラ 次世代ナノスケールマテリアルハブ機関) |
| 問合せ先 | 国立大学法人 北陸先端科学技術大学院大学 ナノマテリアルテクノロジーセンター内 シンポジウム事務局 〒923-1292 石川県能美市旭台1-1 TEL:0761-51-1449 E-mail:arim ARIMシンポジウム担当:東嶺・橋本・麻生・大島・高村 |
| ホームページ | https://www.jaist.ac.jp/project/arim/ |
学生のXUさんがEM-NANO 2025においてStudent Awardを受賞
学生のXU, Yuanzheさん(博士後期課程3年、ナノマテリアル・デバイス研究領域、大島研究室)が、The 10th International Symposium on Organic and Inorganic Electronic Materials and Related Nanotechnologies(EM-NANO 2025)において、Student Awardを受賞しました。
EM-NANO 2025は、有機・無機エレクトロニクス材料とナノテクノロジーに関する国際シンポジウムで、令和7年6月11日~14日にかけて、福井県福井市のAOSSA(福井県県民ホール)にて開催されました。
同シンポジウムでは、全体講演(Plenary lectures)や招待講演、特別セッションのほか、開催10回目を記念する式典も行われ、エレクトロニクス分野における最新の研究成果について活発な議論が行われました。
※参考:EM-NANO 2025
■受賞年月日
令和7年6月14日
■研究題目、論文タイトル等
Microscopic study of Kanazawa gold leaves
■研究者、著者
Yuanzhe Xu, Satoshi Ichikawa (大阪大学) , Kohei Aso, Hideyuki Murata, Yoshifumi Oshima
■受賞対象となった研究の内容
超薄膜(約100~200 nm)である金沢金箔の組織変化を調査しました。常温で処理されたにもかかわらず、焼鈍や熱間圧延を行わなくても、面心立方(FCC)金属において強い{001}テクスチャが形成されることは、長年の謎でした。今回、EBSDとTEMを用いて、No. 4金箔において[101]方向に沿って幅約100nmのスリップバンドが形成され、{011}-<011>スリップシステムと一致することを発見しました。この滑り系はFCC金属では稀な現象であり、超薄膜による活性化が原因と考えられます。この現象と交差滑り活動が、ハンマー加工中の{001}組織の形成を促進しています。
■受賞にあたって一言
It is a great honor to receive the "Student Award" at EM-NANO2025. I am truly encouraged by this recognition from the committee, which strengthens my determination to further explore the unique deformation mechanisms of Kanazawa gold leaf. As this research is closely tied to the cultural and scientific heritage of Kanazawa and the Hokuriku region, receiving this award at a local conference is especially meaningful to me. This achievement would not have been possible without the invaluable support and guidance of my supervisor, Prof. Yoshifumi Oshima, and the generous assistance of Specially Appointed Professor Satoshi Ichikawa from the Research Center for Ultra-High Voltage Electron Microscopy, Osaka University. I would also like to thank Senior Lecturer Kohei Aso and all the laboratory members for their generous support in both research and daily life.
令和7年7月17日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2025/07/17-2.html学生のXIONGさんがEM-NANO 2025においてStudent Awardを受賞
学生のXIONG, Weiさん(博士後期課程3年、ナノマテリアル・デバイス研究領域、大島研究室)が、The 10th International Symposium on Organic and Inorganic Electronic Materials and Related Nanotechnologies(EM-NANO 2025)において、Student Awardを受賞しました。
EM-NANO 2025は、有機・無機エレクトロニクス材料とナノテクノロジーに関する国際シンポジウムで、令和7年6月11日~14日にかけて、福井県福井市のAOSSA(福井県県民ホール)にて開催されました。
同シンポジウムでは、全体講演(Plenary lectures)や招待講演、特別セッションのほか、開催10回目を記念する式典も行われ、エレクトロニクス分野における最新の研究成果について活発な議論が行われました。
※参考:EM-NANO 2025
■受賞年月日
令和7年6月14日
■研究題目、論文タイトル等
Interlayer fracture of multilayer MoS2 evaluated by in situ transmission electron microscopy
■研究者、著者
Wei XIONG, Lilin XIE, Yoshifumi OSHIMA
■受賞対象となった研究の内容
引張変形中の多層MoS₂ナノシートの破断プロセスをin situ透過型電子顕微鏡(TEM)を用いて観察し、新たな層間破断メカニズムを明らかにしました。亀裂は異なる層のジグザグ状の縁に沿って伝播し、層間相互作用と摩擦の弱さにより段差構造を形成していました。この結果は、MoS₂の層間結合に関する従来の計算シミュレーションなどに一石を投じており、ナノエレクトロニクスやフレキシブルデバイス応用における二次元材料の機械的特性と信頼性に関する新たな知見を提供するものです。
■受賞にあたって一言
It is my great honor to receive the "Student Award" at EM-NANO 2025. The recognition from the EM-NANO 2025 committee for my research and presentation has greatly encouraged me to continue exploring the intrinsic properties of 2D materials. I feel fortunate to have successfully built a stable platform for atomic-resolution in situ tensile experiments. However, this achievement would not have been possible without the invaluable support and guidance of my supervisor, Prof. Yoshifumi Oshima, to whom I would like to express my deepest gratitude. I would also like to thank Dr. Lilin Xie, whose research provided both confidence and convenience during my work. In addition, I sincerely appreciate the help and support from Senior Lecturer Kohei Aso and all the laboratory members, both in my research and daily life.
令和7年7月17日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2025/07/17-1.html令和7年度 第1回 超越量子未来アリーナ ネオ・エクセレントコアセミナー
セミナーを下記のとおり開催しますので、ご案内します。
| 日 時 | 令和7年7月16日(水) 15:00~16:00 |
| 場 所 | 知識科学系講義棟 2階 中講義室 |
| 講演者 | LAU, Hon Wai 氏 Visiting Researcher, OIST |
| 講演題目 | Exploring the power of quantum resources in machine learning and communication ※講演要旨は別添フライヤーのとおり |
| 使用言語 | 英語 |
| お問合せ先 | 超越量子未来アリーナ 教授 リム 勇仁(E-mail:ylim |
● 参加申込・予約は不要です。直接会場にお越しください。
令和7年度 第1回 先端国際・社会変革推進本部セミナー「走査トンネル顕微鏡を用いた量子スピン計測及び制御」
下記のとおりセミナーを開催しますので、ご案内します。
| 日 時 | 令和7年6月9日(月)15:30~16:30 |
| 場 所 | マテリアルサイエンス系講義棟 1階 小ホール ※オンライン配信あり ※オンラインでの参加をご希望の方は、下記お問い合わせ先にご連絡ください。 |
| 講演者 | 東京大学物性研究所 土師 将裕 助教 |
| 講演題目 | 走査トンネル顕微鏡を用いた量子スピン計測及び制御 |
| 使用言語 | 日本語 |
| お問合せ先 | 北陸先端科学技術大学院大学 ナノマテリアル・デバイス研究領域 准教授 安 東秀 (E-mail:toshuan |
● 対面参加の場合、参加申込・予約は不要です。直接会場にお越しください。

第3回研究科セミナー(ナノマテリアル・デバイス研究領域)「円偏光イメージングによる磁気・カイラル構造分析とその展望」
| 日 時 | 令和7年5月28日(水)15:30~16:30 |
| 場 所 | マテリアルサイエンス講義棟 1階 小ホール |
| 講演題目 | 円偏光イメージングによる磁気・カイラル構造分析とその展望 |
| 講演者 | 文部科学省 初等中等教育局 教科書調査官(物理) 成島 哲也 氏 |
| 使用言語 | 日本語 |
| お問合せ先 | 北陸先端科学技術大学院大学 ナノマテリアル・デバイス研究領域 准教授 安 東秀 (E-mail:toshuan |
● 参加申込・予約は不要です。直接会場にお越しください。