研究活動の検索
研究概要(研究室ガイド)やプレスリリース・受賞・イベント情報など、マテリアルサイエンスの研究室により公開された情報の中から、興味のある情報をタグや検索機能を使って探すことができます。PufferFace Robot:フグに着想を得たボディ一体型振動推進型ロボット

PufferFace Robot:フグに着想を得たボディ一体型振動推進型ロボット
【ポイント】
- ソフトロボットの設計:PufferFace Robot(PFR)は、フグに着想を得た振動駆動型のソフトロボットで、やわらかく膨らむ外皮により配管の直径の変化に柔軟に対応して進みます。
- 移動性能及び配管内走行能力:3つの移動モード(振動のみ/膨張・収縮のみ/両者の組み合わせ〈メインモード〉)を備えています。自身の外径の1~1.5倍サイズの配管を通過可能で、本体と同サイズの配管内では最大0.5 BL/s(体長/s)の速度で移動可能です。
- 複雑な配管構造での実走行:90度エルボ、T字コネクタ、高曲率セクションなど、複雑な配管構造での走行能力を実験により検証しました。
- 応用可能性:PFRは複雑で狭隘な小口径の配管における点検作業を目的としています。例えば、石油・ガス配管、化学プラント、上下水道管などが挙げられます。また、有害化学物質や高温などの過酷な環境での探査にも有効で、シンプルな制御でも安定した動作が可能です。
- シミュレーションと実験アプローチ:ABAQUSを用いた簡易的な有限要素解析(FEA)によるシミュレーションを通じて、PFRの走行可能性を評価した結果、実験と高い一致性を確認しました。
| 北陸先端科学技術大学院大学(学長・寺野稔、石川県能美市)ナノマテリアル・デバイス研究領域のHo Anh Van教授(IEEE上級会員)が、Linh Viet Nguyen大学院生(博士後期課程)(研究当時)、Khoi Thanh Nguyen大学院生(博士後期課程)らの研究チームを率いて、テキサス大学オースティン校のThe Advanced Robotic Technologies for Surgery Laboratory (ARTS Lab)との共同研究により、複雑な配管内部を自在に前進できる新しいソフトロボット「PufferFace Robot (PFR)」を開発しました。PFRは、フグのように体を膨らませる柔軟な素材と、振動による推進する機構を組み合わせることで、多様な管内形状に対応できる設計となっています。これにより、90度の曲がり角やT字型の分岐、高曲率セクションなど、従来のロボットが苦手としていた区間でも安定した走行を実現しました。本研究では、複雑な計算処理を必要とせず、ロボット本体の構造によって環境への適用を実現する「身体性知能(embodied intelligence)」という考え方も重要視されています。 PFRは、JAISTプレスリリースにて前回紹介した振動駆動型ソフトロボット「Leafbot」(※)の進化形であり、ソフトロボティクス分野の新たな基盤となる可能性を秘めています。 (※)https://www.jaist.ac.jp/whatsnew/press/2025/02/17-1.html |
【研究背景と内容】
柔軟素材を用いたソフトロボットは、その柔軟性と適応性により、従来の硬い素材を用いたロボットでは効果を発揮することが困難な環境でも活躍することができることから、近年大きな注目を集めています。ソフトロボットは、適応的な形態変化を備えており、これは身体知能の一形態として機能し、最小限の計算で環境の変化に応じて反応することが可能です。従来のロボットが複雑な中央制御に依存しているのに対し、適応型ロボットは物理的構造を通じて局所的に調整を行うことで、計算負荷が軽減され、環境応答性が向上します。本研究では、産業、車両、航空宇宙分野で流体やガスの輸送によく使用される配管のような、制約のある可変形状における適応的な移動に焦点を当てました。このような配管は狭く人間が立ち入ることが難しいため、ロボットによる点検のニーズが高まっています。しかし、このような配管は直径、形状、長さが場所によって大きく異なるため、ロボットの設計には大きな課題があります。
これまでにも様々な推進機構(車輪式、歩行式、クローラー式、振動式など)を持つロボットが開発されてきましたが、それらをセンチメートルスケールの配管に適応させるのは困難です。近年の研究では、圧電素子、誘電エラストマー、流体エラストマー、ハイドロゲル、形状記憶合金、電磁アクチュエータなどのスマート素材を用いた生物に着想を得たロボットが開発されています。これらのコンパクトで柔軟な設計は、複雑で狭い配管システムの中を移動するための適応性とエネルギー効率を向上させます。しかし、このような制約のある環境において、機敏で配管のサイズに適応して移動できる信頼性の高い点検ロボットの実現は、依然として課題です。
前述の課題(図1A参照)に対応するため、本研究では新たに「PufferFace Robot (PFR)」という適応型ソフトロボットを開発しました(図1B, D, E参照)。この名称はフグ(pufferfish)から着想を得たことに由来します。PFRは、形態学*1的なスパイクパターンを持つシリコーンゴム製の膨張可能な柔らかい外皮を特徴としており、その設計パラメータは我々の先行研究である「Leafbot」から受け継いだものです。外部の圧縮空気源によって膨張・収縮を操作し、様々な配管形状に適応させることが可能です。PFRの移動メカニズムは、柔らかいスパイクの先端に分布された非対称な摩擦特性に基づいています。その非対称性と振動源を組み合わせることでPFRは前進します。この構成により、PFRの小型構造でも前進移動が可能であると示しました。PFRには3つの移動モードがあります。モード1では、振動モータを作動させて水平な配管を移動します。モード2では、柔らかい外皮の膨張・収縮のみで動作します。モード3は、モード1とモード2を組み合わせたハイブリットモードで、配管内移動における主要なモードです。

| 図1 (A)配管システムにおける形状が制約された様々な空間の例、 (B)様々な空間に適応可能なPufferFace Robotのコンセプト、 (C)フグから着想を得たPFRの設計コンセプト、(D)PFRの膨張状態、(E)PFRの通常状態 |
PFRの設計の詳細を図2に示します。様々な配管サイズに対応するための形態学的なソフトスキンに加え、PFRには暗所での点検作業を支援するためにLEDと小型カメラが搭載されています。今回、設計したPFRには以下の利点があります。
図2 PFRの詳細な設計図 (A) PFRの構成部品 (B) PFRの前面図および側面図
本研究では、「テラダイナミクス(terradynamics)」の手法を採用し、PFRが配管システムの困難な「地形条件」に対して、どれほど効率的かつ効果的に走行できるかを評価しました。これには、鋭角な曲がり(エルボ継手)、高曲率領域、分岐点、水平から垂直への移行、あらゆる方向での配管サイズの変化、T字分岐での操縦が含まれます。これらのシナリオにおけるPFRの性能を図3に示しています。有限要素解析(FEA)に基づいたシミュレーションプラットフォームであるABAQUSのDynamic Explicitモジュールを使用し、PFRを実環境に配置する前に特定の管状環境における通過可能性を評価しました。すべてのテストケースにおいて、シミュレーションの結果は実験結果とよく一致しました。図3(C),(F),(J)は、ABAQUS環境下でシミュレーションした検討シナリオを示しています。

| 図3 実験及びシミュレーション解析による配管システム内の重要な領域を走行するPFRの能力評価 (A, B, G) PFRが実環境及びシミュレーション環境(C,J)においてエルボ(曲がり)部分を走行する様子、 (D, E, F) PFRが実験及びシミュレーションの両ケースにおいて、サイズの異なる空間の移行部を通過する様子、(I) 振動モータの回転方向を変えることで、PFRが方向転換能力を発揮する様子 |
本研究では、ハイブリット推進システムを搭載した生物に着想を得たロボット「PufferFace Robot(PFR)」を提案しました。提案した設計では、狭隘な環境への高い適応性、検査中に気体や流体の流れを妨げない中空機構、複雑な配管内でも最小限の制御で移動可能な適応形態といった利点を有しています。さらにPFRは振動駆動型ソフトロボット、特に小規模配管用途に特化した設計の可能性を広げます。この技術革新は、工業点検だけでなく、医療用途、特に大腸検査のような低侵襲手術にも大きな可能性を秘めています。柔らかく適応性のある構造は、複雑で傷つきやすい生物学的環境を安全に移動することを可能にし、従来の内視鏡ツールに代わる、より安全で効率的な選択肢を提供します。今後は、さらなる小型化と移動性能の向上を目指し、より狭く限られた空間でも自在に動けるように改良を進めていく予定です。
【論文情報】
| 雑誌名 | Science Advances |
| 論文名 | Adaptable cavities exploration: Bioinspired vibration-propelled PufferFace Robot with morphable body. |
| 著者 | Linh Viet Nguyen; Hansoul Kim; Khoi Thanh Nguyen; Farshid Alambeigi, and Van Anh Ho |
| 掲載日 | 2025年4月30日 |
| DOI | 10.1126/sciadv.ads3006 |
【用語説明】
生物の体制や構造を研究する学問
令和7年5月8日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/05/08-1.html自然環境と生体物質の歴史に学ぶー高分子の世界に挑戦!ー
 ソフトマテリアル研究室" width="146" height="220" class="imgR" />
ソフトマテリアル研究室" width="146" height="220" class="imgR" />
自然環境と生体物質の歴史に学ぶ
ー高分子の世界に挑戦!ー
DRY & WET ソフトマテリアル研究室
Laboratory on DRY & WET Soft Materials
准教授:桶葭 興資(OKEYOSHI Kosuke)
E-mail:
[研究分野]
高分子科学、光化学、ソフトマター
[キーワード]
ゲル、水、ソフトマテリアルの幾何学、光機能材料、エネルギー変換材料、バイオミメティクス
研究を始めるのに必要な知識・能力
高分子科学、物理化学、材料科学、光化学、ソフトマターの基礎知識や経験を持っていると望ましいでしょう。そして何より、チャレンジングスピリットを強く持っている人、好奇心の強い人、思考の持久力を高めたい人と研究を始めたいと考えています。
この研究で身につく能力
論理説明能力・解釈能力、科学的な仮説検証・立案力、高精度なディスカッション能力、発表能力、英語コミュニケーション力
学問分野:高分子科学、光化学、コロイド科学、界面化学、幾何学、非線形科学など
【就職先企業・職種】 化学メーカー、医療機器メーカー、自動車関連、材料全般、食品関連、化粧品関連など
研究内容
自然界を見渡すと、目に見えるレベルで綺麗なパターンがたくさんあります。たとえば生体組織は小さな分子から「自己組織化」 によって創り上げられています。これは、物質そのものにだけ由来している訳ではなく、外的な環境が強く作用した結果です。変化する環境に適応できるように生命が進化した結果、多様な空間 パターンやリズムが生まれています。
一方、人工的に合成された分子から物理環境を制御してパターンを創り出す研究は歴史的に長くなされています。しかし、合成分子のままでは医療や工業的に材料化する上で困難を極め、生体組織との調和や自然との共生には幾つものハードルがあります。これに対して我々は直近の研究で、天然分子の多糖が自らパターンを再構築する現象を発見しました。ここで、「なぜ」「どのように」パターンをつくるのかを解明できれば、生体適合性と環境適応性を合わせ持つマテリアルを手に入れることができます。
1.DRY でWET な天然多糖の自己組織化
天然から抽出された多糖は、どのようにcmスケールの幾何学パターンを生み出すのか、特に、乾燥環境下で多糖が見せる「空間認識」の法則性を検証しています。DRY でWET な非平衡環境下、ミクロにもマクロにも高分子が組織化して析出してきます。実際の生体組織が常に乾燥環境におかれながらもWETなからだを維持していることを振り返ってみれば、水中から陸上進出した生体高分子の進化を紐解く鍵があるはずです。
2.ソフトマテリアルのパターン制御
生体高分子、合成高分子に関わらず多くのソフトマテリアルは、界面の応力制御によって形態の制御が可能です。ほんの小さな環境の違いや僅かな力学的エネルギー負荷によって、多様な構造や形態を見せます(自己集積、自己相似、フラクタルなど:図参照)。これを利用してDRY でWET な環境に適応した医療用材料の設計法を見出したいと考えています。
これら「自然美の追求」を基に現象の法則性を導くことが究極目標です。そして、生物がなぜパターンを創るようになったのか?自然科学の大命題に挑戦しています。
主な研究業績
- Bioinspired gels: polymeric designs towards artificial photosynthesis. Hagiwara R, Yoshida R, Okeyoshi K, Chemical Communications 60, 13314-13324 (2024).
- Recognition of spatial finiteness in meniscus splitting through evaporative interface fluctuations. Wu L, Saito I, Hongo K, Okeyoshi K, Advanced Materials Interfaces 10, 2300510 (2023).
- DRY & WET: meniscus splitting from a mixture of polysaccharides and water. Okeyoshi K, Polymer Journal 52, 1185 (2020).
使用装置
各種光学顕微鏡、各種光学装置(偏光、蛍光など)、画像解析装置、粘度計、密度計、動的光散乱、電子顕微鏡
研究室の指導方針
社会で働くトレーニング期間として、個人個人の能力を最大限に発揮できるようにサポートします。我々のグループは研究・文化の両面で多様な環境に在り、多角的な視野を構築する上で日本でも稀に見る貴重なチャンスです。突出した先端研究をみなさんと進めたいと考えています。そのためにも以下1−3の基礎を実践していきます。
1. 実験とディスカッションを通して論理的思考力と先見性の能力を養う。
2. 仮説と検証を繰り返し大目標にアプローチする。
3. 学会発表、学術論文発表を念頭に科学的言語を使う。
これらの積み重ねを自信にして創造力を高めていきたいと考えています。熱いハートのみなさん、ぜひ21世紀のパイオニアを目指して一緒にチャレンジしましょう!
[研究室HP] URL:https://sites.google.com/oke-acgroup.com/web/home-j
人工細胞膜の形や動きを探求する


人工細胞膜の形や動きを探求する
生体ソフトマター物理研究室
Laboratory on Biological and Soft Matter Physics
准教授:濵田 勉(HAMADA Tsutomu)
E-mail:
[研究分野]
ソフトマター物理、生物物理
[キーワード]
ソフトマター、人工細胞、生体膜、リポソーム、相分離、分子ロボティクス
研究を始めるのに必要な知識・能力
リポソームの実験に興味を持って楽しく取り組めること、物理・化学の基本的な知識があることが望ましいです。
この研究で身につく能力
- 人工細胞膜の実験技術
- ソフトマターの物理化学に関する知識
- 光学顕微鏡を主とする分析装置の取り扱い技術
- 英語の学術論文を読み書きする力
- 学会発表や修士・博士論文などで成果を表現する力
【就職先企業・職種】 化粧品、食品、化学、機械、バイオ研究開発など
研究内容
両親媒性ソフトマターである脂質分子は、自己集合して膜を形成します。脂質膜は、2次元膜面内での相分離や、3次元空間でのベシクル変形などの多様な物理現象を示し、その構造は弾性エネルギーにより支配されます。生体細胞は、この脂質膜を器・界面として利用しています。ミトコンドリア・小胞体のような複雑な構造体を形成したり、膜の融合・分裂などのダイナミックな動きが物質輸送を行っています。また、脂質膜小胞は、ドラッグデリバリーや化粧品などの材料としての応用開発も進められています。
私たちは、ソフトマター物理学的な視点から、細胞サイズの人工膜小胞(リポソーム)をデザインします。分子が集まることで創発する膜の秩序状態やダイナミクスに注目し、特に相分離・相転移などの物理現象が関連する膜の動的な構造や機能の研究を進めています。多様な膜現象を支配する物理化学法則の解明や新奇現象の発見を目指し、膜の世界を探求します。
1.膜の動態コントロール
光応答性分子を膜に導入することで、膜の融合、相分離の生成・消滅、小胞の開閉(細胞のオートファジーに類似した動き)、膜の出芽(細胞のエンドサイト-シスに類似した動き)を光で制御できることを発見しています。ナノメートル領域の膜分子の反応を、マイクロメートル領域の膜ダイナミクスに変換する機能システムを、膜の物性に基づき設計します。
2.膜の相分離現象
生体細胞膜を模倣した不均一な膜表面(相分離構造)を人工的に作り出し、不均一パターンを動的に制御する因子や法則姓を明らかにします。これまでに、分子の電荷による影響や、膜曲率との関連、コロイドやDNA等のゲスト分子との相互作用について明らかにしています。
3.膜の力学応答
物理的刺激に対する膜ダイナミクスの研究を行っています。これまでに、シアストレスや浸透圧によって膜面の相分離構造・パターンが変化することを発見しています。刺激の強さ、温度、膜の分子組成などに依存した、膜の応答ダイナミクスの体系化を進めています。
主な研究業績
- "Photo-induced fusion of lipid bilayer membranes" Y. Suzuki, et al., Langmuir, 33, 2671 (2017).
- "Domain dynamics of phase-separated lipid membranes under shear flow" T. Hamada et al., Soft Matter, 18, 9069 (2022).
- "人工細胞膜のダイナミクス解析と構造制御" 濵田勉, 応用物理, 86, 875 (2017).
使用装置
画像解析システム
蛍光・位相差顕微鏡
研究室の指導方針
私たちは、人工細胞膜の新奇現象を発見し、膜の新たな可能性を表現することで、膜系が示す物理現象の原理究明を目的に研究をしています。研究活動を通して、基礎知識を活用し課題を解決する能力を養い、好奇心を持ち自ら調べ学ぶことの楽しさを経験してもらいたく思います。
[研究室HP] URL:https://www.jaist.ac.jp/ms/labs/hamada
高分子材料の機能化、高性能化をレオロジー的な手法で行います

高分子材料の機能化、高性能化を
レオロジー的な手法で行います
材料レオロジー研究室 Laboratory on Materials Rheology
教授:山口 政之(YAMAGUCHI Masayuki)
E-mail:
[研究分野]
高分子レオロジー、成形加工
[キーワード]
インテリジェントポリマー、バイオマスポリマー、マテリアルリサイクル
研究を始めるのに必要な知識・能力
マテリアルサイエンス(材料科学)系分野に関する基礎知識があれば、これまでの専門は気にせずとも結構です。むしろ意欲ある学生を希望します。
この研究で身につく能力
高分子はひとつの分子が線状で長いことが最大の特徴です。このような分子形状であるため、高分子は“からみ合い”相互作用を示します。その結果、例えば液体状態でも弾性を示し、さまざまな成形加工が適用できるようになります。からみ合いは高分子らしさを表す最も適切な特性であると言え、レオロジーではその「からみ合い」により示される特性や、それによって形成される構造を取り扱います。当研究室ではレオロジー的な考え方や成形加工の技術を取り入れることで、新しい機能材料や、ポリマー系材料の高性能化へ取り組み、世の中の役に立つ新規材料を創出しています。これらの研究で身につく材料設計に対する考え方は、企業における研究でも大いに役立ちます。
【就職先企業・職種】 高分子材料を扱う樹脂メーカー、加工メーカー、ユーザーなど(詳細はHPに記載)
研究内容
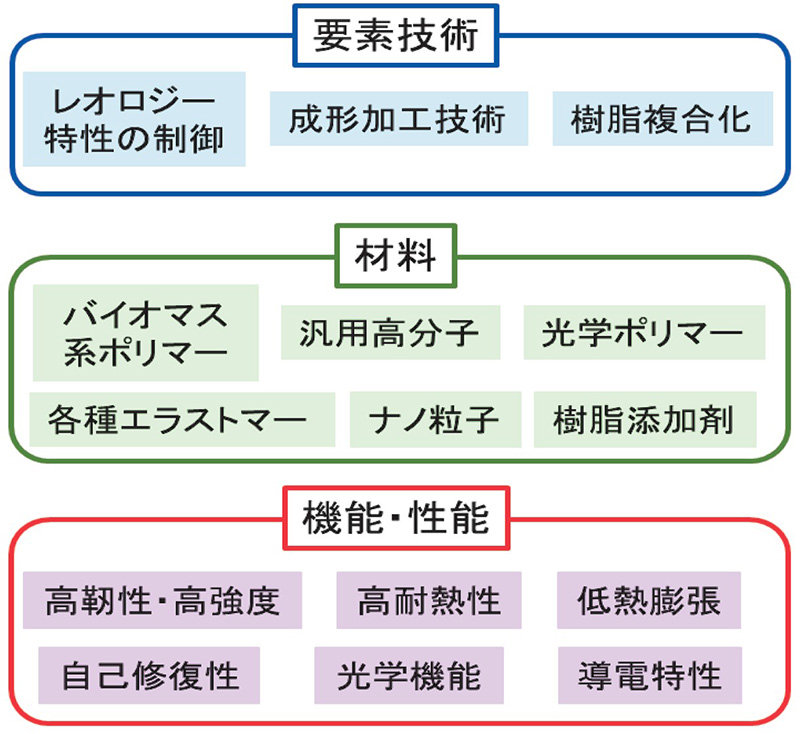
当研究室では、レオロジー特性の新しい制御技術、成形加工技術、ブレンド・アロイやコンポジットなどの樹脂複合化の独自技術を「武器」として、新しい材料設計を化学反応に頼ることなく創出しています。
対象とする材料は、ポリ乳酸やセルロースなどのバイオマス系ポリマー、ポリエチレンやポリプロピレンなどの汎用高分子、ポリメタクリル酸メチルやポリカーボネートなどの光学ポリマー、各種エラストマーなど、ほとんどの高分子材料であり、さらにカーボンナノチューブなどのナノ粒子、各種樹脂添加剤を幅広く取り扱っています。また、高分子以外にも、化粧品や食品などを研究対象とすることがあります。これらの材料の組み合わせや改質、さらには成形により、さまざまな機能を付与し、また、高性能化を行っています。
応用分野はさまざまですが、自動車関係の材料や次世代のディスプレイなど、日本の技術力が強い分野を中心にした研究開発が多くなっております。得られた研究成果の一部は既に工業的にも応用されています。また、成形加工のトラブルや高速成形に対する研究も進め、高分子加工を技術的にサポートしております。以下、研究例の一部を紹介します。
【高分子系複合材料の研究開発】
分子レベルで異種物質の凝集状態を高度に制御することにより、ポリマー系複合材料の高性能化を目指す研究です。次世代気自動車などへの用途展開が期待できる透明樹脂や内装材向け樹脂、透明かつフレキシブルな導電性ポリマーフィルム、植物由来の原料を用いた革新的な光学デバイスなどの開発に取り組んでいます。また、ポリ乳酸の革新的な高性能化など低環境負荷材料を用いた研究も積極的に推進しています。
【レオロジー制御による機能性ソフトマテリアルの材料設計】
レオロジーの考え方はポリマーのみならず、さまざまな分野で必要とされます。特に、ソフトマテリアルである食品や生体材料、化粧品などではレオロジー特性の把握が必要不可欠です。本テーマでは、これら機能性ソフトマテリアルの材料設計をレオロジーの観点から進めています。切断しても再び元通りに治癒する自己修復性材料、形状記憶材料などの設計指針をこれまでに提案しています。
【成形加工技術の深化・構築】
優れた高分子材料でも、成形加工できなければ世の中で使用されません。そのため高分子産業では、成形加工に必要不可欠なレオロジーの専門家を常に必要としています。その基礎となる研究を実施すると共に、新材料のレオロジー特性を明らかにすることで実用化へ貢献しています。
主な研究業績
- 環境問題に立ち向かうポリオレフィンの成形加工技術,山口政之, 成形加工, 32(9), 301 (2020).
- 低分子添加による複屈折制御,山口政之,工業材料,66(4), 33-37 (2018).
- 成形加工性向上のための高分子レオロジー制御技術,山口政之,機能材料,38(4), 4-12 (2018).
使用装置
レオロジー測定装置
成形加工機
分光分析装置
力学特性評価装置
研究室の指導方針
当研究室では、主として高分子物性に関する知見に基づいて、材料の設計から成形技術に至るまで、さまざまな研究テーマを設定し活動しています。また、実際に役立つ研究を行うために、企業との共同研究を積極的に進めています。私自身の企業経験も活かしながら就職活動へのサポートも行い、総合的な力を伸ばしてもらいたいと考えています。
ポリマー材料の研究開発に興味をお持ちの方は、是非、当研究室を訪問してください。
[研究室HP] URL:https://www.jaist.ac.jp/ms/labs/yamaguchi/
材料の柔らかさを活かした次世代ロボットの開発
材料の柔らかさを活かした次世代ロボットの開発
ソフトロボット研究室 Laboratory on Soft Robotics
教授:ホ アン ヴァン(HO Anh-Van)
E-mail:
[研究分野]
ロボティクス
[キーワード]
ソフトロボティクス、柔軟な触覚装置
研究を始めるのに必要な知識・能力
自然の物事と現象を解明することにより、柔軟物を積極的に利用した新機能の機構を開発する本研究室は、分析力や実践力を求め、機能材料の力を借りて技術課題を解決する想像力を重視しています。また、特定の分野・知識を問わずに、ものづくりに興味を持つ学生を歓迎します。
この研究で身につく能力
| ・機械設計、電子回路設計、加工方法 ・プログラミング、制御 ・計算、解析 |
・提案能力 ・コミュニケーション能力、論文作成力 ・グローバルな思考、起業魂 |
【就職先企業・職種】 機械設計会社、電機メーカ、大学等
研究内容
概要:
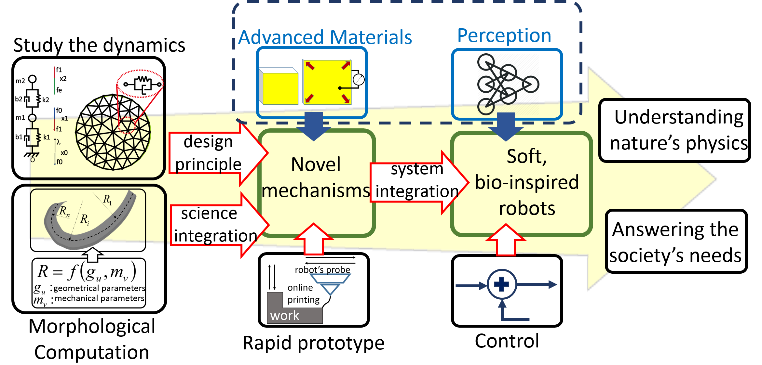
自然界のすべての現象には、何らかの形で必ずダイナミクスが関与しています。このダイナミクスを理解できれば、その現象を生じさせるために、メカニズムがどのように進化してきたかを理解することが可能になります。また、そのメカニズムをロボットの駆動装置または感覚装置に応用することで、新しい機構を創出できると考えられます。本研究室の長期研究計画・内容については以下の図をご参照ください。
内容:
本研究では柔軟物とその形態制御を用いてセンシング装置・アクチュエーター・知能は以下のようなテーマで行われています。
【短期のテーマ】
| ① | 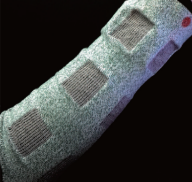 織物のような柔軟な質感を持つ新しい触覚センサの開発、そのマルチ・モーダルな特性を活かすセンシングに基づいた制御方法の開発を積極的に進めています。 織物のような柔軟な質感を持つ新しい触覚センサの開発、そのマルチ・モーダルな特性を活かすセンシングに基づいた制御方法の開発を積極的に進めています。 |
| ② |  遠隔操作システムにおいて、ロボット上の触覚センサによって得られた触感(圧力・摩擦・すべり)をヒトの指先に再現できる装置を開発しています。 遠隔操作システムにおいて、ロボット上の触覚センサによって得られた触感(圧力・摩擦・すべり)をヒトの指先に再現できる装置を開発しています。 |
| ③ | しわのメカニズムにヒントを得た、柔軟性を有するアクチュエータを用いて柔軟物を変形させることによって、同一のセンサのみでも異なるセンシング能力が得られる能動的な触覚センサの開発を目指します。 |
【長期のテーマ】
④ 柔軟物を掴めるソフトロボットハンドの開発
⑤ ラピッドプロトタイプ技術の開発
⑥ 柔軟な思考のあるロボットの開発 等
主な研究業績
- Van Ho et al., IEEE Transactions on Robotics, Vol. 27, No. 3, pp.411-424, 2011
- Van Ho et al., IEEE Sensors Journal, Vol. 13, No. 10, pp. 4065-4080, 2013,
- Van Ho et al., IEEE Robotics and Automation Letter, Vol. 1, Issue 1, pp. 585-592, 2016
使用装置
3Dプリンター、電動直動ステージ、6軸力覚センサ、触覚提示装置、小型NC加工機、高速度カメラ
研究室の指導方針
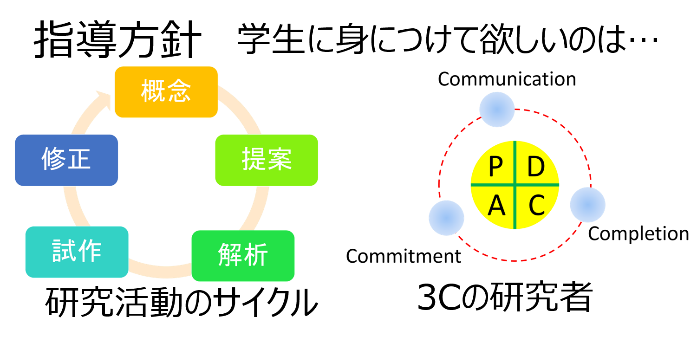
修士課程、博士課程に関わらず、本研究室に右側の図が示すような「研究活動のサイクル」や「3Cの研究者」を身につけた学生を育成します。そのため、毎週のミーティングで学生の進捗・成長を積極的にフォローします。
研究活動において、各メンバーの発想・アイデアを尊重にして、PDCA(Plan・Do・Check・Action)を通じて具体的な実現方法が見つかるまで指導します。
学生のキャリアパスの選択を全力でサポートします。
[研究室HP] URL:https://www.jaist.ac.jp/ms/labs/vanho/index.html
人と安全に協働できる"ソフトロボットリンク"を開発 触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
人と安全に協働できる"ソフトロボットリンク"を開発
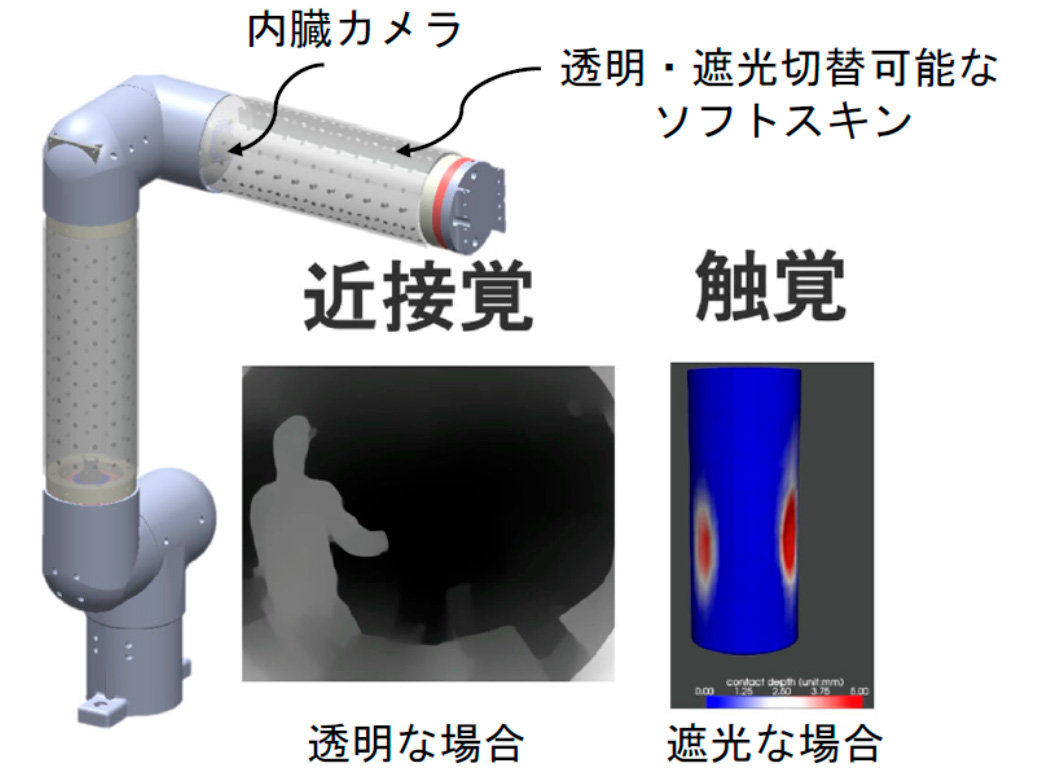
触れてわかる、近づいて感じる-近接覚と触覚のハイブリッドセンシング技術「ProTac」
【ポイント】
- 透明・不透明を切り替えられるソフトスキンと視覚センサーを用い、近接センシングとスキン変形の解析による触覚センシングを備えたマルチモーダルソフトセンシング技術「ProTac」を開発
- 市販ロボットアームにも取り付け可能
- 従来の剛体リンクでは困難とされる、接触の多い環境下での動作制御が可能
- 農業や介護など、人とロボットが協働する作業への応用に期待
- AI駆動型センシングフュージョン技術
| 北陸先端科学技術大学院大学 ナノマテリアル・デバイス研究領域のクアン・ハン・ルウ研究員、ホ・アン・ヴァン教授らの研究チームは、透明・不透明を電圧により切り替えられるソフト素材と視覚センシング技術を融合し、近接・触覚の両モードを切り替えて検知できるマルチモーダルソフトセンシング技術「ProTac」を世界で初めて開発しました。ProTacを用いたソフトロボットリンクは、周囲の物体を検知する近接センシングとマーカー画像の変化から触覚情報を読み取る触覚センシングを一台で切り替えて行うことができ、人との接触が多い環境で安全に動作制御が可能です。なお、本研究成果は、2025年7月28日にIEEE Transactions on Robotics(T-RO)に掲載されました。 |
【研究概要】
近年、人と同じ空間で安全かつ柔軟に作業できるロボットのニーズが高まっています。これに応えるため、私たちの研究チームは、ソフト機能材料と画像や映像から情報を取得・解析する技術である視覚センシング技術を融合した新しいマルチモーダルソフトセンシング技術「ProTac」(図1)を開発しました。
ProTacは、電圧をかけることで透明・不透明を切り替えられるポリマーディスパースド液晶(PDLC)フィルム注1)と内蔵カメラを組み合わせています。透明時には視界を活用して周囲の物体の近接を検知し、不透明時にはマーカー画像の変化から触覚情報の取得を実現します。また、最新の深層学習ベースの視覚アルゴリズムを用いることで、安定したリアルタイムセンシングが可能です。
図1:ProTacのイメージ図
この技術を用いたソフトロボットリンクは、市販のロボットアームやカスタム製作されたソフトロボットにも取り付け可能で、障害物検知に基づく速度調整や接触時の反射動作など、多様な制御戦略を実現します。ProTacを備えたソフト多機能センシングアームは、人とロボットが密に連携する場面や、従来の剛体リンクでは困難な動作制御において高い性能を示しました。
今後は、この技術を手足や胴体などロボットの各部位に応用し、高機能なマルチモーダルスキンを備えたヒューマノイドロボットの実現が期待されます。また、農業、家庭サービス、介護分野など、幅広い分野での応用も見込まれます。
【研究資金】
本研究は、日本学術振興会 科学研究費補助金 特別研究員奨励費(24KJ1203)、国立研究開発法人 科学技術振興機構(JST)さきがけ(JPMJPR2038)による財政的支援を受けて実施されました。
【論文情報】
| 掲載誌 | IEEE Transactions on Robotics |
| 論文タイトル | Vision-based Proximity and Tactile Sensing for Robot Arms: Design, Perception, and Control |
| 著者 | Quan Khanh Luu, Dinh Quang Nguyen, Nhan Huu Nguyen, Nam Phuong Dam, Van Anh Ho |
| 掲載日 | 2025年7月28日 |
| DOI | 10.1109/TRO.2025.3593087 |
【用語説明】
電圧により透明・不透明を切り替えられる液晶材料。柔軟であり、ディスプレイやスマートウィンドウなどの光の透過を制御する用途に使用される。
令和7年8月22日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/08/22-1.htmlLeafbot:振動機構によって駆動される一体型移動ソフトロボット

Leafbot:振動機構によって駆動される一体型移動ソフトロボット
【ポイント】
- ロボット設計: Leafbotと名付けた機構とボディ一体型(モノリシック*1)シート状ロボットは、シリコン製の本体に振動で駆動する運動機構を組み込み開発されました。
- ロコモーションと地形のナビゲーション: Leafbotは、その形態学的な設計により、平坦や斜面、起伏のある地形や障害物がある複雑な地形での効率的な横断(ロコモーション)を可能としました。
- 最高速度: 高周波による振動にて、Leafbotの最高速度は、平坦な道を最高速度5 BL/s(体長毎秒)を達成しました。
- テラダイナミクスの解析: 本研究では、事前に定義した条件下でLeafbotの地形横断能力を評価しました。またLeafbotに組み込まれる運動機構を3パターン設計し、性能比較を行いました。
- 実験による分析:ロコモーションダイナミクスを解析するため、数学モデルを開発し、実験を行いその検証を行いました。
- 本研究の応用: Leafbotは人間が直感的に操作しやすいため、配管などの狭所や複雑な地形を持つ環境下での検査作業の容易化が期待されます。
| 北陸先端科学技術大学院大学(学長:寺野稔、石川県能美市)ナノマテリアル・デバイス研究領域のHo Anh Van教授が、NGUYEN, Linh Viet大学院生(博士後期課程)、NGUYEN, Khoi Thanh 大学院生(博士後期課程)らの研究チームを率い、柔軟素材を用いた機構とボディ一体型のシート状ソフトロボット「Leafbot」を開発しました。Leafbotは足やボディと一体化し、振動により駆動する画期的な機構を持ちます。これにより効率的な移動と地形ナビゲーションを実現しました。また、本研究により、Leafbotは、斜面や険しい路面を含む複雑な地形を横断する能力が示され、配管など狭所で複雑な環境下での応用の可能性があり、ソフトロボティクスの進歩に大きく貢献することが期待されます。 |
【研究の背景と内容】
柔軟素材を用いたソフトロボットは、その柔軟性と適応性により、硬さを持つ剛体ロボットでは適応が困難な環境への適応を可能とするため、大きく注目されています。ソフトロボットにはこのような利点があるにも関わらず、移動ソフトロボットの分野では、複雑な地形での効率的な移動の実現が未だ根強い課題として挙げられます。現在の移動ソフトロボットの設計は、振動を利用した機構を持つ移動ソフトロボットが得意な平坦な地形での移動に重点を置く傾向が見られます。しかし、それらは、斜面や障害物が存在する道、凹凸のある不規則な地形での移動には限界があります。このような限界は、実世界の条件下で、一体として機能する材料特性や動的設計、ロコモーション戦略(ロボットの運動・移動の計画)を統合することの難しさの起因となっています。
Leafbot(図1)は、複雑な地形での効率的なロコモーションという重要な課題に取り組んだ移動ソフトロボットの分野における画期的な成果です。Leafbotの特徴は、柔軟性・耐久性・適応性を兼ね備えたシリコンゴム製のシート型のソフトボディです。このロボットの核となる機構は、移動を行う環境とダイナミクス(動力学)な動きに相互作用する振動により駆動する機構です。
図1: (A)リーフボットのコンセプト、(B)Leafbotの設計
Leafbotの足は、曲率と弾力性を追求した形状をしており、凹凸のある地形と相互作用を最適化するだけでなく、非対称な摩擦力を利用して前進するための推進力を得ることができます。この足の設計は、多様な地形への適応性を持つだけでなく、限定された条件下で急斜面を乗り越えることを可能としています。
本研究チームは、手足の数が異なる3つのパターンのLeafbot(Leafbotの手足の数により3、5、9とナンバリング)を開発し、その動作検証を行いました。その結果、手足の数が多いほど摩擦が増加し、地形への適応性が向上しました。その一方で、手足の数が少なければ、より高速の移動が可能となることが示されました。Leafbotは、平坦な地形(道)において、最高速度5 BL/s(体長/秒)を達成します。さらに、このロボットは半円形の障害物のある道や険しい地形、斜面を移動する際にも卓越した性能を発揮しました。これはLeafbotが困難な環境下に適していることを証明しています。加えて、この研究では、Leafbotにロコモーションダイナミクスを解析する数値モデルを設計し、様々な条件下でのパフォーマンスを理解するための枠組みを提供します。

図2: Leafbot-X5は環境の凹凸をナビゲートし、2次元空間で操縦できる
Leafbotは、移動ソフトロボットが持つ行動能力を平坦な地形から拡大することで、この分野に新たな基準を打ち立てます。この技術は、工業検査や狭所の捜索救助活動、整地されていない農地の監視などへの用途で予想されます。さらに、Leafbotの柔軟でフレキシブルな構造は、平らな場所であれば起伏のある地形でも移動することが可能です。この機能は、2次元空間での操縦性を持たせるため、より多くの動力源(振動源)を搭載することで実現しました。また、改良型Leafbot-X5は、形態学的な手足も同様に、Leafbotが環境の凹凸に適応することを可能にしました(図2)。将来的には、より優れたエネルギー効率を実現するため、設計を改良し、また自律的なナビゲーションのために感覚システムを組み込み、多様な環境で耐久性・性能の担保・向上させるために新素材を追求する予定です。
【論文情報】
| 掲載誌 | IEEE Transactions on Robotics (T-RO) |
| 論文題目 | Terradynamics of Monolithic Soft Robot Driven by Vibration Mechanism |
| 著者 | Linh Viet Nguyen; Khoi Thanh Nguyen; and Van Anh Ho |
| 掲載日 | 2025年1月24日 |
| DOI | 10.1109/TRO.2025.3532499 |
【用語説明】
モノリシックとは、Leafbotのように、ロボットのボディに繋ぎ目がなく一体であり、耐久性・柔軟性・適応性が高められていることを指します。
令和7年2月17日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/02/17-1.htmlソフトロボットハンドを農業の未来に

ソフトロボットハンドを農業の未来に
【ポイント】
- 柔軟性を持つ素材で作られたスキンが回転運動で変形することにより、大きさの異なる農作物を優しく掴んで収穫する汎用ソフトロボットハンド「ROSEハンド」に対し、有限要素解析ソフト「Abaqus」を用いて、把持動作によるスキンの変形に関する非線形解析を行いました。
- この解析により、把持性能や材料特性、幾何学的なパラメータなど、形態学的特徴の関係性を調査しました。
- 農作物の収穫など挑戦的な活用における「ROSEハンド」の可能性を示唆するデモンストレーションを行いました。
| 北陸先端科学技術大学院大学(JAIST)(学長・寺野稔、石川県能美市)ナノマテリアル・デバイス研究領域のHo Anh Van准教授、人間情報学研究領域のNguyen Huu Nhan助教、Nguyen Thanh Khoi大学院生(博士後期課程)らの研究グループは、実環境における様々な種類の農産物を収穫するため、座屈現象を利用した新しいソフトロボットハンドを提案しました。 |
【研究の内容】
近年、産業用ロボットの導入により、ロボットハンドは様々な業界において必要不可欠となっています。特に、農業分野では包装や収穫作業等、幅広く使用されています。農業の発展に伴い、ロボットハンドが対象とする農作物は、それら特有の幾何学的な形状や物理特性に合わせて、多種多様となってきています。その複雑性は、農業特有の技術的要件と相まって、従来のロボットハンドの課題となっています。そのため、形状やサイズ、質感など様々な属性を持つ農作物に適応可能な汎用性の高いロボットハンドの需要が高まっています。
既存の手法において、ロボットハンドは、データに基づくモデルによって生成される複雑な制御や動作計画に依存しています。これには膨大なデータベースと複雑な設計を必要とするため、既存の手法では限界になってきています。そのため、革新的な解決法の開発が急務となっています。以前、我々のグループでは、新たなソフトロボットハンドである「ROSE(ROtation-based Squeezing GrippEr)ハンド」を開発しました(※)。これは農業における実環境下の収穫作業に対し、よりシンプルで効果的な方法を提供するものです。(図1A)。
(※) https://www.jaist.ac.jp/whatsnew/press/2023/07/14-1.html
「ROSEハンド」は、薄く柔らかい弾性体である内側と外側の2枚の層で形成されています。これらの層の間には空間があり、内側の層を回転させることにより層が変形し、「ROSEハンド」本体の内部に「しわ」が生じます。(図1B)。この特有な変形によって、この中央の空間は徐々に収縮し、この空間内にある対象物を優しく掴むことが可能となります。
本研究では、「ROSEハンド」が持つ「掴む」メカニズムを最適化するため、柔らかい素材の複雑な非線形変形をシミュレーションすることができるソフトウェア「Abaqus」を使用しました。非線形性を持つ弾性体は、変形(曲げることや伸びること)しても元に戻る特性を持ちます。その力学的な挙動をモデリングすることは大きな課題となっています。「Abaqus」は、この特性に対処する高度なコンポーネントと制御モジュールを備えており、「ROSEハンド」が持つ複雑性について正確なシミュレーションを行うことができます。
「ROSEハンド」の機能の根幹には、回転動作により発生する「しわ」が生じる「ねじり」の現象があります。「ROSEハンド」の内側の層が外部モータによって「ねじり」の運動を受けると、外側の層と内側の層で「ずれ」が生じます。(図1A)。この「ずれ」は、「ROSEハンド」の縁周辺に不均一な「ひずみ」をもたらし、この「ひずみ」がある点から力が加わると「しわ」の形成に繋がります。この「しわ」によって、「ROSEハンド」の縁が狭まることにより、把持動作が可能となっています。「Abaqus」によるシミュレーションの結果、形態学的な特徴(高さ、直径、厚さ)と把持機能の相関関係が明らかになりました。この発見により、「ROSEハンド」の形状設計を最適化することで、全体的な性能を向上させることができ、これにより改良された「ROSEハンド」で、従来のロボットハンドでは困難であった様々なタスクを検証しました。
本研究では、農業での「ROSEハンド」の実用化が収穫作業における画期的な変化となり得ることを見出しました。農作物のようなデリケートなものを扱うには、従来のロボットハンドでは様々なハードルがありましたが、改良後の「ROSEハンド」は様々な形状や質感に適応可能なため、収穫のような作業に非常に効果的です。
図1. ROSE Design and Wrinkles formation mechanism.
本実験では、「ROSEハンド」でキノコ(図2A)やイチゴ(図2B)のような作物の収穫を行いました。これらのように柔らかい・硬いに関わらず確実に把持することができ、収穫作業の高い成功率を保証することができました。この「ROSEハンド」による収穫機能は、収穫作業の効率を向上させるだけでなく、高齢化に直面している地域での労働力不足にも効果があります。収穫作業を自動化することにより、「ROSEハンド」は農業の持続可能な効率化に貢献し、農業の未来に不可欠なツールとなります。

図2. A) ROSE harvesting mushroom and B) ROSE harvesting strawberry
【今後の展開】
この研究成果がもたらすインパクトは、科学的な研究とその応用の両方から述べることができます。まず、科学的なインパクトは、世界で初めて弾性体の持つ「しわ」の現象を把持機能へ応用したことです。「ROSEハンド」は、通常のロボット設計者が持つ弾性体に現れる「しわ」を引き起こす「たわみ」が望ましくないという一般的な考えを変えることができます。次に、応用面では、「ROSEハンド」の実用性は様々な分野の用途で有望視されています。例えば、「ROSEハンド」の持つ特性により、食品工場などにおける食品のハンドリングや本研究で示した農業の収穫だけでなく、箱詰めのような他の農作業へも利用することが可能です。
本研究では、「ROSEハンド」が農作業の自動化に貢献できることを明らかにしました。また、「ROSEハンド」の活用を他分野に応用することを視野に入れ、日本が直面している労働力不足解消に重要な役割を担うことが期待されます。
本研究成果は、2024年9月23日に、ロボティクス分野の主要ジャーナル「International Journal of Robotics Research」(米国SAGE Publications社)に掲載されました。
【論文情報】
| 雑誌名 | International Journal of Robotics Research |
| 論文題目 | Soft yet secure: Exploring membrane buckling for achieving a versatile grasp with a rotation-driven squeezing gripper |
| 著者 | Khoi Thanh Nguyen, Nhan Huu Nguyen, and Van Anh Ho |
| DOI | 10.1177/02783649241272120 |
令和6年9月26日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2024/09/26-1.html細胞・組織の機能を制御する高分子材料を創成し、医療に役立てる

細胞・組織の機能を制御する高分子材料
を創成し、医療に役立てる
生体制御高分子研究室 Laboratory on Biofunctional Polymers
教授:松村 和明(MATSUMURA Kazuaki)
E-mail:
[研究分野]
材料化学、高分子化学、生体材料
[キーワード]
高分子化学、バイオマテリアル、再生医療、凍結保存、ハイドロゲル
研究を始めるのに必要な知識・能力
化学をベースとして、生体に応用できる材料を目指すので、化学の基礎知識は持っていた方が望ましいです。その上で、生物学や医学に対しても必要な事を習得する姿勢を期待します。異分野からの参加は歓迎しますが、化学、高分子化学の勉強を興味を持って続けられる向上心は必要です。
この研究で身につく能力
生体材料の研究は化学・生物・医学また物理学を含んだ学際的領域の研究です。生体の持つ高度に制御された機能を学び、それを代替する材料の創成を目標として研究を続けていくことで、化学のみならず、生物学や医学、物理学などの幅広い学問分野に触れ、多角的な物の見方を獲得することが出来ます。
また、生体材料の研究は目的がはっきりしているニーズ指向型の研究のため、課題解決能力を育む事が可能です。特に博士後期課程の学生に関しては、問題発見能力も同時に身につけるように研究を進めていきます。
【就職先企業・職種】 製造業・化学メーカーなど
研究内容
機能性高分子バイオマテリアル
人工臓器やドラッグデリバリーシステム(DDS)には高分子化合物のようなソフトマテリアルが多く使用され、研究されています。バルクな材料だけでなく、コロイドやミセル、溶液なども一種のバイオマテリアルとして様々な場面での研究が展開されています。
高分子材料はそのバルク界面で、もしくは溶液状態で細胞や組織と相互作用し、機能を制御することが可能であることがわかってきました。また、様々な場面でその機能を利用したバイオマテリアルの研究開発が行われています。
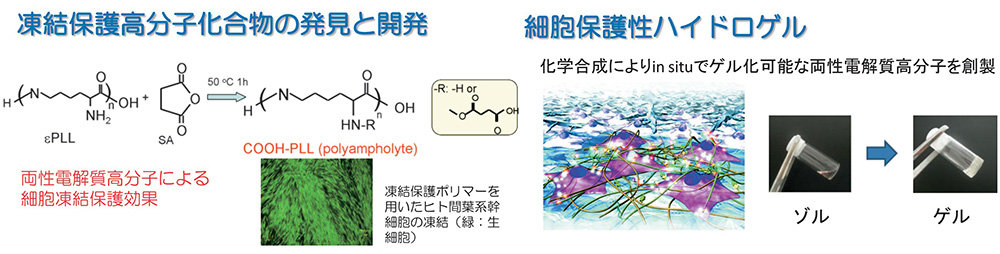
凍結保護高分子
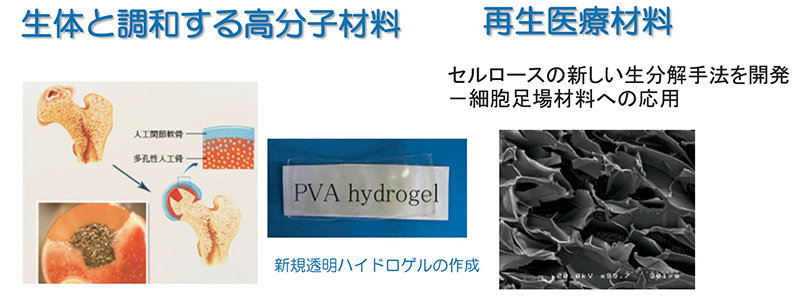
細胞を凍結保存することができる高分子を見出し、その機序を調べると共に応用を目指しています。この不思議な現象は、電荷密度の高い高分子化合物、特に両性電解質高分子に見られる特徴であることがわかってきました。細胞などの様な水を含む高次構造体をそのまま凍結すると細胞内の水の結晶化により致命的なダメージが加わり、死滅します。このような高分子化合物で細胞を凍結時のダメージから保護できるということは、これまでの常識では考えにくいことでした。従って、この現象の機序を解明することで、凍結保護だけでなく、生体組織や高次構造体の保護作用などへとつながる可能性を秘めています。我々はこの高分子をゲルにすることで、細胞保護性のハイドロゲルを作成しました。また、ナノ粒子化することでドラッグデリバリーシステムへの応用も試みています。
再生医療応用可能な高分子
再生医療や組織工学に応用可能な、生体内分解性セルロースの開発も行っています。この技術により、細胞をその中で増殖させ、生体内で細胞治療が可能な足場材料の開発が期待されます。
生体と調和する高分子バイオマテリアル
生体機能の再生を目的とした診断・治療の支援を行うために、材料工学の手法を用いた、基礎的ならびに応用的研究も目指しています。具体的には、ハイドロゲルを用いた人工関節や人工血管用材料の設計など、高分子材料の観点から生物と化学の融合を目指し、さらには生体を凌駕するような機能を探求しています。
主な研究業績
- Rajan R, Furuta T, Zhao D, Matsumura K. Molecular mechanism of protein aggregation inhibition with sulfobetaine polymers and their hydrophobic derivatives. Cell Rep. Phys. Chem. 5, 102012 (2024)
- Kumar K, Nakaji-Hirabayashi T, Kato M, Matsumura K, Rajan R. Design of Highly Selective Zn-Coordinated Polyampholyte for Cancer Treatment and Inhibition of Tumor Metastasis. Biomacromolecules 25, 1481-1490 (2024)
- Hirose T, Rajan R, Miyako E, Matsumura K. Liquid metal–polymer nano-microconjugations as an injectable and photo-activatable drug carrier. Mol. Syst. Des. Eng. 9, 781-789 (2024)
使用装置
NMR
FITR
動的粘弾性装置
細胞培養用装置
共焦点レーザー顕微鏡
研究室の指導方針
本研究室では、高分子化学の基礎から応用までを理解し、生体材料としての応用を目指しています。そのためには、化学の知識だけでなく、生物や医学、さらには機械工学などの幅広い学問領域に通じている必要があります。また、生体材料がカバーする範囲は、人工臓器、再生医療、ドラッグデリバリー、バイオセンサなど多種多様であり、それらの研究開発に必要な知識を興味を持って獲得し、多角的な視点で課題の解決を遂行できる力のある学生を育成することを目標としています。
年に数度の学会発表を通じてプレゼンテーション能力を身につけ、週一度の研究室ゼミで基礎力・ディスカッション能力を養います。
[研究室HP] URL:https://matsu-lab.info/
タンパク質分子モーターで駆動する微小機械

タンパク質分子モーターで駆動する微小機械
バイオ分子機械工学 研究室
Laboratory on Bio-Molecular Mechanical Engineering
准教授:平塚 祐一(HIRATSUKA Yuichi)
E-mail:
[研究分野]
生命分子工学、機械工学、タンパク質工学、ナノバイオテクノロジー、生物物理学
[キーワード]
分子ロボティクス、MEMS/マイクロマシン、分子モーター、遺伝子工学
研究を始めるのに必要な知識・能力
平塚研究室ではタンパク質を使って人工の機械を作るという全く新しい研究分野を開拓しています。そのため分野を超えた幅広い知識が必要となりますが最も重要なことは「新しいものを作りたい!」という強い意識と「科学的な思考」です。専門的な知識は研究室で学ぶことができます。
この研究で身につく能力
本研究室では、バイオ・化学・微細加工技術・機械工学などを組み合わせた融合的な研究を進めています。融合研究を行うためには異なった専門分野を学んでいく必要があり、多くの学生は躊躇するかもしれません。しかし本研究室での研究開発の経験を通し融合領域では新しい発見や新しい可能性がたくさんあることを学び、専門分野間の垣根が低く感じることになるでしょう。もちろん基礎的な知識なくして融合分野に取り組むことはできません。本研究室では大きさ数ナノメータのタンパク質を人類が利用できるマイクロまたはミリメータサイズの機械として組み立てる研究をしています。そのためにタンパク質や化学物質の分子レベルの構造やナノメータ空間での挙動を理解し、分子レベルから設計できる能力を身につけます。
【就職先企業・職種】 化学メーカー、機械メーカー、IT企業、公務員など
研究内容
図1.光造形可能な人工筋肉で動く微小機械
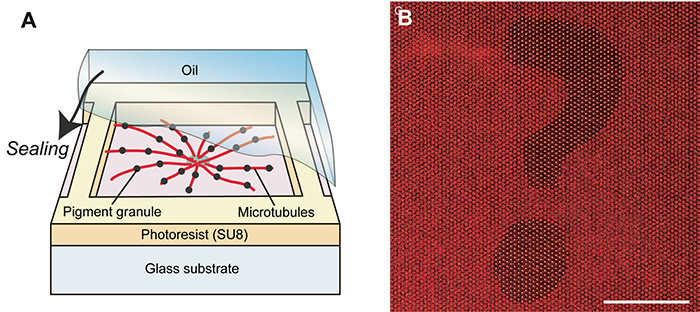
図2.モータータンパク質で駆動する世界初のディスプレイ
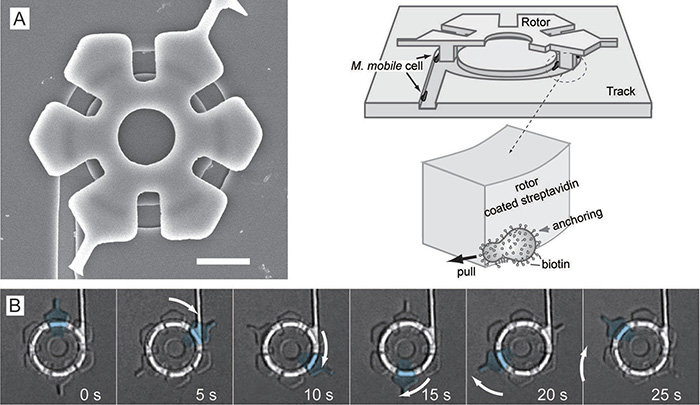
図3.バクテリアで駆動する回転モーター
細胞は、大きさ数ナノメートルのタンパク質がその内部で働くことでさまざまな生命現象を生み出しています。タンパク質は一般に知られているような単なる栄養素の一つではなく「非常に精巧な分子機械」であり「細胞を構成する多彩な部品」です。本研究室では、タンパク質を分子部品として使うことによって、これまで人類が作り出してきた人工機械とは全く異なる夢の微小機械(マイクロマシン、微小ロボット)の創製に挑んでいます。本研究室ではタンパク質の中でも特に「動く」という機能をもった面白いタンパク質「モータータンパク質」に注目し、モータータンパク質で駆動するさまざまな微小な機械の開発に取り組んでいます。
1)光で自在に作製可能な生体分子モーターで動く人工筋肉
筋肉のような収縮性のファイバー(人工筋肉)を、光照射した場所に自在に形成させることに成功しました。光の照射形状を変えることで自由な形状・大きさの人工筋肉が造形でき、ミリメートルスケールの微小機械の動力に利用できます。将来、マイクロロボットやソフトロボットの3Dプリンタによる製造への応用が期待されます。
2)タンパク質により駆動するバイオディスプレイ
生き物には周囲の環境に合わせて体色を変化させる「保護色機能」を持つものがいます。これらの現象はモータータンパク質によって引き起こされています。本研究では微細加工技術とタンパク質工学を組み合わせ、保護色の分子機構を模倣した人工細胞を生体外に作り、世界初のタンパク質で駆動するディスプレイの開発に成功しました。
3) モータータンパク質・バクテリアで動く回転モーター
大きさ数十μmの微小な回転モーターもモータータンパク質やバクテリアを使って作製することに成功しています。これらは従来の人工モーターとは異なり糖や ATP といった化学物質を燃料として動くユニークなモーターとして注目を集めています。
主な研究業績
- Takahiro Nitta, Yingzhe Wang, Zhao Du, Keisuke Morishima & Yuichi Hiratsuka A printable active network actuator built from an engineered biomolecular motor Nature Materials 20, 1149–1155 (2021)
- Susumu Aoyama, Masahiko Shimoike, and Yuichi Hiratsuka Self-organized optical device driven by motor proteins Proc. Nati. Acad. Sci. (PNAS) 110, 16408-16413 (2013).
- Y. Hiratsuaka, M. Miyata, T. Tada and T. Q.P. Uyeda, Micro-rotary motor powered by bacteria, Proc. Nati. Acad. Sci. (PNAS) 103, 13618-13623 (2006).
使用装置
レーザー直接描画装置フォトリソグラフィ装置
タンパク質精製および解析装置高感度
蛍光顕微鏡
細胞培養装置
研究室の指導方針
本研究室の学生には誰もが見たことがない・驚かれるような研究に挑戦してもらいたいと考えています。しかし、そのような研究を成功させるためには基礎的な知識はもちろんのこと論文による学習が必須となります。また自分自身で考え失敗にめげず何度も挑戦し、そして何よりも研究を楽しんでもらいたいと考えています。
[研究室HP] URL:https://www.jaist.ac.jp/ms/labs/hiratsuka/
学生の松本さんと石須さんがSI2024において優秀講演賞を受賞

学生の松本創大さん(令和7年3月博士前期課程修了、ナノマテリアル・デバイス研究領域、HO研究室)と石須滉大さん(令和7年3月博士前期課程修了、ナノマテリアル・デバイス研究領域、HO研究室)が、第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)において、優秀講演賞を受賞しました。
SI2024は、「サステナブルな社会を目指すシステムインテグレーション」をテーマに、SI部門設立25周年の記念大会として、令和6年12月18日~20日にかけて、岩手県のアイーナいわて県民情報交流センターにて開催されました。
優秀講演賞は、SI部門講演会において発表された全ての発表を対象として審査が行われ、講演会実行委員会によって選出されるものです。
※参考:SI2024
■受賞年月日
令和7年2月17日
【松本創大さん】
■研究題目、論文タイトル等
口径変化が可能な吸着型ソフトロボットハンド
■研究者、著者
松本創大、HO, Anh Van
■受賞対象となった研究の内容
松ぼっくりの形状から着想を得た、吸着口を可変できるソフトロボットハンドを開発した。把持したい物体の形状、重さ、大きさに対して適切な口径を変化させることができるロボットハンドを開発し、吸着力実験と把持実験を通してロボットハンドとしての性能を評価した。
■受賞にあたって一言
自分の研究が評価されて、光栄です。今後ソフトロボットが社会実装されるための1手段になってくれることを願います。
【石須滉大さん】
■研究題目、論文タイトル等
深い接触を許容するビジョンベース触覚センサを用いた回転物体における初期滑り検知
■研究者、著者
石須滉大、Luu Quan、HO, Anh Van
■受賞対象となった研究の内容
ロボットの物体把持のために初期滑り検知が必要。視覚ベース触覚センサを使ってこれまでよりも簡単な方法で初期滑りの特徴を検知した。
■受賞にあたって一言
まずは、本研究を支えてくださったLuu QuanさんとHo, Anh Van教授に深く感謝申し上げます。本研究がソフトロボット学の発展に貢献できれば光栄です。
令和7年5月7日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2025/05/07-1.html能美市の中学生の皆さんが来学

8月26日(月)、能美市の中学2年生20名の皆さんが施設見学のため来学しました。
中学生の皆さんは、能美市と沖縄県恩納(おんな)村との教育交流パートナー事業に基づき、9月に沖縄科学技術大学院大学(OIST)を訪問されます。その前に地元にある本学(JAIST)について知り、その後にOISTを見学することで両大学の違いや特徴を認識し、結果としてより学習効果が高まることを目的として、JAISTに見学に来られました。
貴重図書室の『解体新書』(杉田玄白著)や情報社会基盤研究センターの大規模並列計算機「KAGAYAKI」、ナノマテリアルテクノロジーセンターを見学した後、ナノマテリアル・デバイス研究領域のホ アン ヴァン准教授の研究室を訪問しました。ホ准教授と研究室の学生がソフトロボットの実演を行い、中学生の皆さんは科学技術を楽しく学ぶことができたようです。

貴重図書室の見学

大規模並列計算機KAGAYAKIの見学

ナノマテリアルテクノロジーセンターの見学
ホ研究室にてソフトロボットの実演
令和6年9月4日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2024/09/04-1.html生体分子モーターで動く人工筋肉、光で自在に作製可能 ― マイクロ・ソフトロボットの3Dプリントの実現に期待 ―

| 国立大学法人 北陸先端科学技術大学院大学 国立大学法人東海国立大学機構 岐阜大学 国立大学法人 大阪大学 |
生体分子モーターで動く人工筋肉、光で自在に作製可能
― マイクロ・ソフトロボットの3Dプリントの実現に期待 ―
ポイント
- 光照射した場所に自在な形状に作製できる人工筋肉の開発に成功
- 遺伝子工学的に改変した生体分子モーターからなる光応答性の分子システムを開発
- ミリメートルスケールの微小機械の駆動を実証
- マイクロロボットやソフトロボットの3Dプリントの実現に期待
| 北陸先端科学技術大学院大学・先端科学技術研究科 生命機能工学領域の平塚祐一准教授、杜釗 大学院生(博士前期課程)は、岐阜大学・工学部の新田高洋准教授、大阪大学・大学院工学研究科 機械工学専攻の森島圭祐教授、王穎哲 大学院生(博士後期課程/特任研究員)との共同研究で、筋肉のような収縮性のファイバー(以下、人工筋肉)を、光照射した場所に自在に形成させることに成功した。この人工筋肉は、生物の動きに関わるタンパク質である生体分子モーターを遺伝子工学的に改変することにより実現した。光の照射形状を変えることで自由な形状・大きさの人工筋肉が造形でき、ミリメートルスケールの微小機械の動力に利用できることを実証した。この成果は将来、これまで困難であったマイクロロボットやソフトロボットの3Dプリンタによる製造への応用が期待される。 本研究成果は、2021年4月19日(英国時間)に科学雑誌「Nature Materials」誌のオンライン版で公開された。なお、本研究は新エネルギー・産業技術総合開発機構(NEDO)「次世代人工知能・ロボット中核技術開発」(JPNP15009)、日本学術振興会(JSPS)科研費 新学術領域研究「分子ロボティクス」の支援を受けて行われた。 |
【研究背景と内容】
生物のエンジン「筋肉」は、モータータンパク質[*1]と呼ばれる生体分子モーターから構築されており、数百マイクロメートル(マイクロは100万分の1)から数十メートルまでスケーラビリティにとんだアクチュエータである。生物のエネルギー源(アデノシン三リン酸 (ATP))を用いて高い効率で力学的仕事を行うという、従来のアクチュエータと比べ質的に異なる特性を持ち、これまでには無い産業分野での応用が期待されている。しかし、筋肉自体または筋肉細胞をアクチュエータとして利用する試みは基礎研究レベルでは報告されているが、筋肉細胞の安定性・保存性の問題やアクチュエータとして組み込む技術が未発達のため、実用化には至っていない。また、筋肉組織の構成分子はほぼ同定されているが、それら構成分子から筋肉を再構築する技術は知られていなかった。
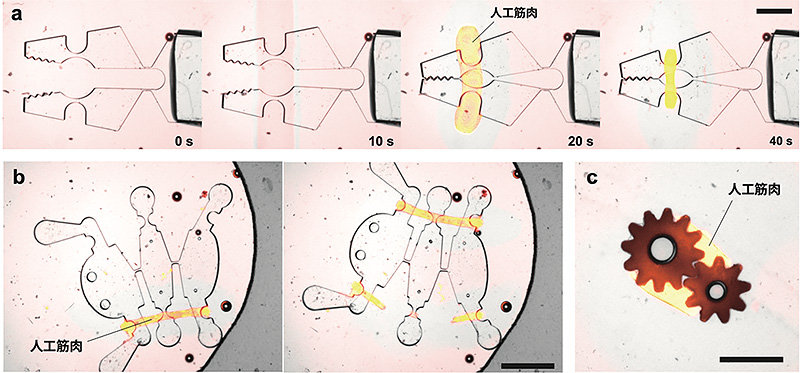
本研究では、生体内の収縮性ファイバーの形成過程に着想を得て、人工筋肉を自在に形成させる分子システムを開発した。モータータンパク質の一種であるキネシンを遺伝子工学的に改変し、フィラメント状にすることにより、レールタンパク質である微小管[*2]と混ぜるだけで、モータータンパク質の動的な機能により自己組織的に人工筋肉を形成させることができた。さらに、光照射によりモーター分子のフィラメント化を開始させ、照射した部位のみに人工筋肉を形成させることを可能とした(図1)。この人工筋肉を大きさ数ミリメートルの機械構造内に形成させることにより微小機械を駆動させることに成功した(図2)。
筋肉のような柔軟で低エネルギー・低環境負荷なアクチュエータの産業応用は期待されているが、上述のように実用化には至っていない。本研究では、生体の運動素子であるモータータンパク質分子を数ミリメートル以上の組織に構築することにより、生物の筋肉に似た機能・性質を持つ人工筋肉の製造を可能とした。特に光照射により人工筋肉の形成を開始可能なことから、たとえば光造形型の3Dプリンタに組み込めば人工筋肉の光造形などが可能になることが将来期待でき、生体材料で駆動するマイクロロボットやソフトロボットの3Dプリント技術の基盤技術となる可能性が高い。
【今後の展開】
本研究で開発された人工筋肉は、現時点では形成・収縮が同時に起こり、かつ収縮は一回のみで用途も限定される。今後、制御用の分子システムを開発することにより、可逆または振動可能な人工筋肉を開発しマイクロロボットやソフトロボットへの実装を目指す。

図1.光照射による人工筋肉形成のコンセプト図
モータータンパク質の一種キネシンを遺伝子工学的に改変し、光照射によりキネシンがフィラメント状になるように設計(K456m13とCaMLMM)。キネシンフィラメントは自身の運動能により微小管を引っ張り、自己組織的に筋肉に似た収縮性の繊維を形成する。
図2. 人工筋肉の応用例
大きさ数ミリメートルのシリコンゴム製の微小構造の周囲に、光照射により人工筋肉を形成させ、その構造を駆動させた。右上)マイクログリッパ:光照射後に人工筋肉(オレンジ色)が形成し、20秒後にグリッパが閉じる。右下)昆虫型デバイス:人工筋肉により左右に動く。左上)ロボットアーム型デバイス。左中)微小歯車の組み立て。左下)細胞サイズの微小ビーズの集積。
【研究資金】
・新エネルギー・産業技術総合開発機構(NEDO)「次世代人工知能・ロボット中核技術開発」(JPNP15009)
・日本学術振興会(JSPS)科研費 新学術領域研究「分子ロボティクス」(JP24104004)
・日本学術振興会(JSPS)科研費 基盤研究(B)(JP18H01407)
【論文情報】
| 雑誌名 | Nature Materials |
| 題名 | "A printable active network actuator built from an engineered biomolecular motor" |
| 著者名 | Takahiro Nitta, Yingzhe Wang, Zhao Du, Keisuke Morishima and Yuichi Hiratsuka* |
| 掲載日 | 2021年4月19日(英国時間)にオンライン版に掲載 |
| DOI | 10.1038/s41563-021-00969-6 |
【用語解説】
[*1] モータータンパク質(motor protein)
生体の動きに関与するタンパク質の総称。大きさ数ナノメートル〜数十ナノメートルの分子で、代表的なものとして筋収縮に働くミオシン、細胞内の物質輸送に働くキネシン、鞭毛運動等に働くダイニンなどが挙げられる。これらは繊維状のタンパク質であるアクチンまたは微小管の上を生体のエネルギーであるATP(アデノシン三リン酸)の加水分解エネルギーを利用して一方向に動く。
[*2] 微小管(microtubule)
細胞骨格を構成する繊維状タンパク質のひとつ。大きさ数ナノメートルのチューブリンが筒状に重合することにより直径25ナノメートルの管状の繊維を形成する。キネシンやダイニンなどモータータンパク質が動くレールとして働く。
令和3年4月20日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2021/04/20-1.htmlパターン形成:分割現象における「対称性の破れ」を実証

 |
北陸先端科学技術大学院大学 科学技術振興機構(JST) |
パターン形成:分割現象における「対称性の破れ」を実証
【ポイント】
- 水の蒸発によって現れるパターン形成「界面分割現象」の新たな特徴を発見
- ポリマー分散液の蒸発界面が複数に分割するとき、「対称性の破れ」が現れることを実証
- 生体組織など自然界に見られる非対称なパターン形成の理解に有用
| 北陸先端科学技術大学院大学(学長・寺野稔、石川県能美市)サスティナブルイノベーション研究領域のグエン チキムロク大学院生(博士後期課程)、桶葭興資准教授らは、ポリマーが水に分散した粘性流体から現れる散逸構造[用語解説1]「界面分割現象」において、対称性の破れ[用語解説2]を実証した。これまで、界面[用語解説3]で起こる幾何学変形が、時間とともにどう進んでいくかは、不明な点が多かった。今回、明確な境界条件のもと、確率統計を通した解析を進めた結果、分割時に現れる核の位置に、空間的な「対称性の破れ」が生じることが明らかになった。これは、生体組織など自然界に見られる非対称なパターン形成の理解に有用である。 |
【研究概要】
自然界には様々な幾何学パターンがあり、例えば雪の結晶の形は、気温と水蒸気の量で多様に変化する。また、乾燥環境は水の蒸発を引き起こし、生物であればその成長過程で非対称なパターンをつくる。これまで、この幾何学性や非対称性について、数理的な解釈がなされてきたものの、物理化学的実験に基づいた再現はなされてこなかった。一方、桶葭准教授らの研究グループはこれまでに、ポリマー水分散系の蒸発界面に着目し、散逸構造「界面分割現象」を報告してきた (※1)。これは、ポリマー水溶液などの粘性流体を明確な境界のある有限空間から乾燥環境下におくと、一つの蒸発界面が複数の界面に分割される幾何学化現象である。ここで、空間軸の一つを1ミリメートル程度の隙間にすることで毛管現象[用語解説4]の物理条件が制御された空間となる。さらに、一定温度下で水の蒸発を一方向になるよう設定すると、蒸発界面直下の濃密なポリマーの密度がゆらぎ、複数の特異的位置でポリマーが析出して界面分割する。具体的には、多糖[用語解説5]の水溶液を乾燥環境下におくと、まるで界面から芽が出るようにセンチメートル単位で多糖が析出し界面が複数に分割される。ここでは、ミクロ構造の秩序化と同時に、マクロなパターンが現れることが分かっていた。しかし、非平衡で開放的な蒸発界面から引き起こされる実際の分割現象は、核形成位置の平均的情報は得られるものの、その不確定さのため複数の核形成メカニズムについては未解明な特徴が多かった。
※1. https://www.jaist.ac.jp/whatsnew/press/2023/09/22-1.html
| 図. 界面分割現象における「対称性の破れ」: A. 空間軸の一つとしてセル幅を大きくしていくと、分割現象の特徴が現れる概念図。界面がゆらぎ、対称性が破れ、そして水中に分散していたポリマーが析出する核を非同期に形成する。B. 同一条件で得られる異なる分割(二分割、もしくは三分割)と、セル幅に対する核形成位置のデータ。C. 対称性の破れを加味した分岐モデル。核1と核2とは、タイミングがずれて発生する(時間的に同期していない)。 |
そこで今回、ポリマー分散液の一つの蒸発界面が、二つ、もしくは三つに分割される空間条件に焦点をあて、その核形成位置を詳細に検討した(図A)。確率統計論を通した界面科学的な解析から、それぞれの分割数に対して、「対称性の破れ」と「非同期性」が現れ、相互に関係し合う特徴であることが分かった。核の位置については平均化による統計評価ではなく、結果に対する場合分けを通し、特徴的な「ずれ」を評価した(図B)。すると、分割点の位置には偏りがあり、セル幅に対して均等に半分、もしくは均等に三分の一に分割するわけではない、という基本原理が明らかになった。実際、二分割される場合、核はセル幅の中心ではなく、中心からずれた位置に形成される傾向となった。この「ずれ」は、セル幅を少しずつ大きくすると顕著に現れ、三分割される場合、2番目の核形成が起こるタイミングや位置に大きく影響し、非同期性として現れた。この「対称性の破れ」と「非同期性」は、時間発展の現象理解に重要である(図C)。
また、この核間隔は、ポリマー水溶液の液相と空気の界面における毛管長が影響する。今回の実証実験では、粘性流体として多糖キトサン[用語解説6] の水分散系を用いており、5~8ミリメートル程度の間隔であった。これまでにいくつかの多糖でも分割現象は実証されており、研究グループは現在、様々な化学種・物質群への拡張や現象の特徴的メカニズムの解明を進めている。これらを通して、自然界にも通ずるパターン形成の普遍的理解が期待される。
本成果は、2025年6月4日に科学雑誌「Advanced Science」誌(WILEY社)のオンライン版で公開された。なお、本研究は、国立研究開発法人科学技術振興機構(JST) 創発的研究支援事業(JPMJFR201G)、日本学術振興会科研費 基盤研究B(JP23K21136)、日本学術振興会科研費 新学術領域研究(JP22H04532)、および公益財団法人旭硝子財団 若手継続グラントの支援のもと行われた。
【今後の展開】
生物を含め自然界には多様な散逸構造が在り、対称性の破れを明確に扱うことは重要である。パターン形成に関する歴史的研究にはチューリングパターン[用語解説7]などがあり、ソフトマテリアルを題材とした研究例も多い。これは、生物における自己組織化の理解や実空間におけるマテリアル設計に重要なテーマと認識されているためでもある。今回のような実検証を通じたパターン形成の理解が進めば、今後、高分子科学、コロイド科学、界面科学、材料科学、流体力学、非平衡科学、生命科学などの分野への進展に留まらない。実時空間と仮想時空間を通した数理科学、シミュレーション、データサイエンスなどとの融合によって、パターン形成の理解と材料設計に有用と期待される。
【論文情報】
| 掲載誌 | Advanced Science (WILEY) |
| 題目 | Symmetry breaking in meniscus splitting: Effects of boundary conditions and polymeric membrane growth |
| 著者 | Thi Kim Loc Nguyen, Taisuke Hatta, Koji Ogura, Yoshiya Tonomura, Kosuke Okeyoshi* |
| DOI | 10.1002/advs.202503807 |
| 掲載日 | 2025年6月4日 |
【用語解説】
令和7年6月4日
出典:JAIST プレスリリース https://www.jaist.ac.jp/whatsnew/press/2025/06/04-1.htmlナノマテリアル・デバイス研究領域のHO教授のチームがRoboSoft 2025 Competitionにおいて優勝

ナノマテリアル・デバイス研究領域のHO, Anh Van教授のチームが、8th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2025) Competitionにおいて、Manipulation Challenge 1st placeを獲得しました。
RoboSoft 2025は"Interdisciplinarity and Widening Horizons"をテーマとして、令和7年4月23日~26日にかけて、スイス(ローザンヌ)にて開催されたソフトロボティクスに関する国際会議です。同会議では、研究者、業界の専門家、学生が一堂に会し、最先端の進歩を探求し、様々な分野における知見を共有しました。
同会議と併催で行われたコンペティションは、実際のロボットアプリケーションに焦点を当てたシナリオで構成され、「管内移動」、「デリケートな果物の収穫」、「医療スクリーニングと介入」という3つの具体的な課題が提示されました。HO教授のチームは「デリケートな果物の収穫」の課題に参加し、最も高い得点を獲得しました。
※参考:RoboSoft 2025(Competitions)
■受賞年月日
令和7年4月26日
■研究題目、論文タイトル等
ROSE: A Rotation-Based Soft Gripper Harnessing Morphological Computation for Adaptive and Robust Manipulation
■研究者、著者
Khoi Thanh Nguyen, Nhan Huu Nguyen, and Van Anh Ho
■受賞対象となった研究の内容
このコンペティションでは、ラズベリーのような繊細な果実を収穫する際のソフトロボットグリッパーの有効性を評価します。果実の遮蔽状態の変化、密集、動きによる乱れといった実際の農業現場に見られる課題を再現することで、現実的な収穫条件をシミュレーションしています。
フィールドに即した環境を再現することで、この競技は、実用的な果実収穫において柔軟性(コンプライアンス)と力の制御を効果的に両立できるソフトグリッパーの設計を明らかにします。
この結果は、農業分野におけるソフトロボティクスの重要な役割を強調し、グリッパー技術の現在の進展を示すとともに、自動化かつ繊細な作物収穫システムに対する大きな成長可能性を示唆しています。
提案されている課題は以下の通りです:
・課題1:ロボットが単体のベリーを摘み取る
・課題2:ロボットが密集しているベリーを摘み取る
・課題3:葉に部分的に隠れた単体のベリーを摘み取る
・課題4:葉に部分的に隠れた密集したベリーを摘み取る
・課題5:動いている単体のベリーを摘み取る
当チームのソフトグリッパー「ROSE」は、すべての課題を8分未満で成功裏に完了しました。
■受賞にあたって一言
今回のコンテストは、非常に意義があり、必要な取り組みであると感じました。競技シナリオは、距離制限、葉や枝といった障害物の存在、果実の揺れ、さらには果実の柔らかさまでも再現されており、現実の環境を非常によく模倣していました。そのため、同コンテストは、ベリーの収穫能力を評価するための優れたベンチマークとなります。
また、他のチームの興味深い設計を直接見られる場でもあり、それらの実際の効果を確認できる貴重な機会でもありました。さらに、アイデアを交換したり、将来的な共同研究の可能性について議論したりするための交流の場としても、とても良い機会になりました。
今回、Holabの収穫アームが1位を獲得できたことを非常に嬉しく思っています。この成果により、多くの人に私たちのアームを知ってもらうことができ、JAISTの存在も広く認識されるようになりました。同コンテストを通じて、自分たちの技術の実力を再確認するとともに、現時点での課題も明確になり、今後の改善に向けた大きなヒントを得ることができました。
令和7年5月20日
出典:JAIST 受賞https://www.jaist.ac.jp/whatsnew/award/2025/05/20-1.htmlナノマテリアル・デバイス研究領域のHo教授の「ROSEハンド」が日本科学未来館1階 「Tokyo Mirai Park」内にて展示されます
東京都は「東京ベイeSGプロジェクト」として、日本科学未来館1階に「Tokyo Mirai Park」をオープンし、最先端テクノロジーを展示しており、令和7年3月19日(水)からは、展示をリニューアルし、「やわらかい」をテーマにしたユニークなテクノロジーを展示します。
今回、ナノマテリアル・デバイス研究領域のHo Anh-Van(ホ アン ヴァン)教授のバラの花から着想を得た、モノを包み込むように掴むソフトロボットハンド「ROSEハンド」が展示されますので、ぜひお立ち寄りください。
東京都の報道発表資料はこちら(外部リンク)
「Tokyo Mirai Park」における展示のリニューアル及び「先行プロジェクト」成果発表会の開催について
令和7年3月13日
出典:JAIST お知らせ https://www.jaist.ac.jp/whatsnew/info/2025/03/13-1.html